Математическая модель процесса управления скоростью движения асфальтового вибрационного катка

Автор: Иванчура В.И., Прокопьев А.П.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 2 т.6, 2013 года.
Бесплатный доступ
Статья посвящена задаче идентификации динамической системы объёмного гидравлического привода ходовой части вибрационного катка. Рассмотрена математическая модель процесса управления скоростью движения асфальтового вибрационного катка с учетом динамики гидрообъёмной трансмиссии и момента сопротивления движению катка.
Вибрационный каток, гидрообъемная трансмиссия, математическая модель, пространство состояний
Короткий адрес: https://sciup.org/146114731
IDR: 146114731 | УДК: 625.084/085:625.855.3
Mathematical model of speed control of asphalt vibratory roller
Is devoted to the problem of identification of a dynamic system volume hydraulic vibratory roller chassis. A mathematical model of the speed control asphalt vibratory roller to the dynamics of hydraulic transmission and torque resistance movement roller.
Текст научной статьи Математическая модель процесса управления скоростью движения асфальтового вибрационного катка
Строительство дорожных покрытий нежесткого типа в Российской Федерации является важной народно-хозяйственной задачей. Главные недостатки российской дорожной отрасли – малое количество и низкое качество автомобильных дорог с асфальтобетонным покрытием. Значительного улучшения качества строительства асфальтобетонных дорожных покрытий, с уменьшением до 50 % всех дефектов и разрушений [1, 2], можно добиться за счет качественного уплотнения асфальтобетонной смеси (АБС). Отряд дорожно-строительных машин по укладке и уплотнению АБС включает асфальтоукладчик и звено катков соответствующих типов и марок.
Известны научные и практические данные [3, 4]: чем выше плотность асфальтобетонного покрытия после укладчика, тем ровнее и долговечнее готовое покрытие. При устройстве асфальтобетонного покрытия с применением горячих смесей их температура является основным стохастическим фактором, значительно влияющим на рабочий процесс уплотнения и эксплуатационные показатели покрытия.
Наибольшее распространение в современных технологиях дорожного строительства при окончательном уплотнении АБС получили вибрационные дорожные катки. Существуют проблемы правильного выбора катка, настройки режимов его работы, от которых зависит производительность процесса уплотнения, а также окончательные показатели качества и долговечность дорожного покрытия. Конструкции уплотняющих дорожных машин, выпускаемые предприятиями, имеют высокий технический уровень.
Актуальной задачей совершенствования процесса уплотнения асфальтобетонных покрытий считается разработка системы автоматического управления на основе современных достижений науки и техники [5].
Рабочий процесс вибрационного катка направлен на достижение требуемой плотности асфальтобетонного покрытия за счет многократных воздействий вальцом (вальцами) на уплотняемый материал с повторяющимися проходами. Уплотняемая среда – асфальтобетонная смесь - характеризуется существенной нелинейностью из-за непрерывного изменения характеристик при деформации нелинейной упруговязкопластической среды, изменения температуры уплотняемого слоя во времени, процесса релаксации напряжений, температурной сегрегации и других факторов, что требует постоянного внимания со стороны оператора за управлением режимами работы вибрационного катка. Обеспечение эффективной работы дорожных катков возможно только за счет автоматизации технологических процессов. Основные проблемы: отсутствие автоматизации управления при реверсировании, плавности перехода с одной полосы на другую, учет изменения температуры при управлении процессами.
Цель научной работы - разработка математической модели процесса управления скоростью движения асфальтового катка.
Исходное математическое описание системы и постановка задачи
Каток представляет собой самоходную машину, в состав которой входят силовая установка, передняя и задняя рамы, кабина, механизм обработки кромки асфальтобетона. Рабочим органом катка (в зависимости от модели катка) является гладкий металлический валец (рис. 1) с встроенным вибровозбудителем.
Для разработки современной системы управления рабочими режимами вибрационного катка в процессе уплотнения асфальтобетонной смеси требуется проведение теоретических исследований на основе математических моделей. В статье рассмотрена математическая модель процесса управления скоростью движения вибрационного катка с учетом динамики ги-дрообъемной трансмиссии.
Разработка математической модели в пространстве состояний и теоретические рассуждения проводятся в терминах переменных состояний.
Гидроконтур привода хода. Гидроконтур привода хода вибрационного двухвальцового катка включает в себя регулируемый насос привода хода и два гидромотора.
Гидропривод вальцов катка как управляемую систему можно представить в виде двух подсистем: гидравлической и гидромеханической. Переменной состояния, характеризующей гидравлическую подсистему, выступает величина гидравлического давления P ( t ) гидравлического давления потока жидкости, создаваемая насосом относительно давления в сливном баке. Переменной состояния, характеризующей гидромеханическую подсистему, является величина и m (t ) скорости вращения вала гидромотора под воздействием давления потока жидкости.
Решение задачи в терминах переменных состояний
Уравнение состояния гидравлической подсистемы без учета ограничения на управляющее воздействие u(t ), изменяющего величину гидравлического давления P(t ),
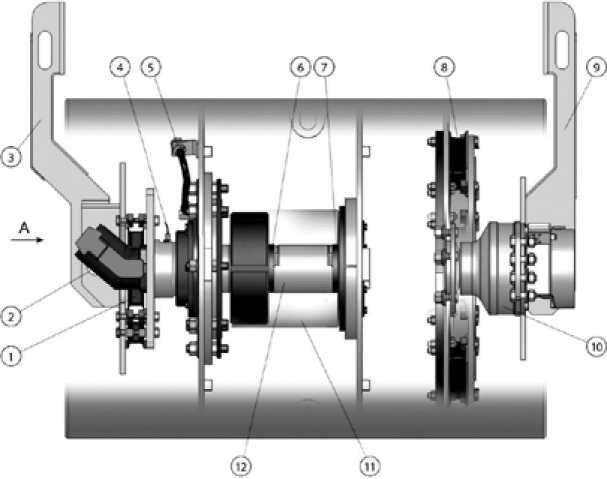
Рис. 1. Валец вибрационный (источник информации: ОАО «Раскат»): 1, 8 – амортизатор; 2, 10 – гидромотор; 3, 9 – опора; 4 – датчик частоты оборотов; 5 – заливная пробка; 6, 7 – дебаланс; 11 – корпус вибратора; 12 – вибровал
=- K P (,)- qm. „ (,) + qPL „ (,). „ (,), (1)
m e dt Kel Kel Kel где Kloss – коэффициент, учитывающий потери давления в гидравлической линии при передаче, с ∙ м4/кг; Kel – коэффициент упругости трубопровода с жидкостью передающей гидравлической линии, м5/Н; P(t) - гидравлическое давление потока жидкости, Па; qm - максимальный рабочий объем гидравлического двигателя вальца, м3; qp - максимальный рабочий объем насоса, м3; юm(t) - частота вращения вала гидромотора, рад/с; иe(t) - частота вращения вала двигателя, рад/с; u(t) - управляющее воздействие.
Коэффициент упругости трубопровода с жидкостью определяется выражением [6]
K el =
п ■ d2 ■ L
4 E el
где d и L - диаметр и длина трубопровода соответственно, м; E el - приведенный объемный модуль упругости трубопровода с жидкостью, Па:
Eflu
E el =
.
1 + J_ . Eflu,
5 ■ Е ■ pip pip
Здесь Eflu - модуль упругости жидкости, Па; Epip - модуль упругости материала трубопро-δ pip – толщина стенки трубопровода, м.
Управляющее воздействие гидравлической подсистемы u(t ) изменяет производительность насоса, может быть как положительным, так и отрицательным.
Управляющее воздействие ограничено по абсолютному значению
| u ( t )| * 1. (2)
Введем обозначения:
a ii = - Ki'" ; a i2 =- qm- ; b ii = qp- ю e ( t); x i ( t ) = P ( t ); x 2 ( t ) = ™ m ( t )•
K el K el Kel
Тогда уравнение состояния гидравлической подсистемы (1) можно записать в стандартной форме (3):
dx1(1 ) M М К
—-— - an ■ x i ( t ) + a i2 ■ x 2( t ) + bn • u ( t ). (3)
dt
Переменной состояния, характеризующей гидромеханическую подсистему, является величина скорости вращения и m(t) вала гидромотора, изменяющейся под воздействием давления на входе, создаваемого относительно давления в сливной магистрали. Уравнение состояния записывается для одного гидромотора, эквивалентного двум параллельно работающим. Эквивалентность обеспечивается равенством мгновенных значений угловых скоростей вальцов при допущении об абсолютной жесткости рамы катка и достигается соответствующим изменением параметров гидромотора и его нагрузки:
d^ m lt! = q- m - bp. P ( , ) - ^„ m ( , )-± M n ( . ) , (4)
dt Jb Jb Jb где Jb - приведенный к валу двигателя момент инерции, кг • м2; bи - коэффициент гидромеханических потерь, зависящих от угловой скорости, H ∙ м ∙ с; bp – коэффициент гидромеханических потерь, зависящих от давления на входе гидромотора, м3.
Возмущающее воздействие, момент нагрузки M n ( t ), определяется влиянием указанного момента на угловое ускорение вальцов уплотняемой асфальтобетонной смеси при движении асфальтового вибрационного катка и зависит от режима его работы.
Введем обозначения:
a 21 = q m — b P ; a 22 = - b » ; b 22 = - -1; % i ( t ) = P ( t ); x 2 ( t ) = © m ( t ).
JbJbJb
Тогда уравнение состояния гидромеханической подсистемы (4) запишется в следующей стандартной форме (5):
dx2^ = a 21 • x i ( t ) + a 22 • x 2 ( t ) + b 22 • M n ( t ). (5)
dt
В результате преобразований получена математическая модель, в терминах пространства , переменных состояния, описывающая рабочий процесс системы автоматического регулирования скоростью движения вибрационного катка. Уравнения состояния гидропривода катка как управляемой системы, таким образом, представлены в виде системы уравнений (6), два совместно решаемых уравнения (3) и (5) относительно гидравлического давления xt(t) и угловой скорости вращения вальцов x2(t) катка:
dxO dt
= a n • x i ( t) + a i2 • x 2 ( t ) + b ii • u ( t );
dx 2 ( t) za z.x ,
—-— = a 21 • x i ( t ) + a 22 • x 2 ( t ) + b 22 • M n ( t ),
I dt либо в виде одного векторно-матричного уравнения состояния (7)
dX^t) = A • X ( t ) + B • U ( t ) dt
Выражения для векторов состояния X(t) и входных воздействий U(t ), матриц A , B следуют из сопоставления (6) и (7):
X ( t ) =
x 1( t ) x 2( t )
U ( t ) =
u ( t )
.Mn ( t )
a 21
a 12 ] . B = Г b 11 0
a 22 J ’ [ 0 b 22
Уравнения состояния (6), характеризующие насос и гидромотор, получены с использованием теоретических моделей научных работ [6–8]. Уравнения (3), (5)–(8) также описывают в пространстве переменных состояния поведение системы регулирования скорости движения дорожного катка по каналу управляющего воздействия с учетом его ограничений и влияния среды. Полученные уравнения состояния позволяют перейти к описанию с использованием передаточных функций (матриц).
Решение задачи с использованием передаточных функций (матриц)
Передаточная матрица, связывающая давление в гидравлической подсистеме с вектором входных воздействий, имеет следующий вид:
Г ап a 12 \ f i 0 \ г Ь ц о у
A m "I I ; I "L ,| ; B 3 "I п , I ; Ч m - ( 1 0 ) ; C 2.m =( 0 1 ) ,
( a 21 a 22 J 1 0 1 J I 0 b 22 J
С 1 m ( 5 • I - A m ) - 1 B 3 =
^ 11 • ( a 22 — 5 )
2 a 12 • a 21 - a ll • a 22 - 5 + a ll • 5 + a 22 • 5
a i2 • b 22
2 a 12 • a 21 - a 11 • a 22 - 5 + a 11 • 5 + a 22 • 5
Передаточная матрица, связывающая угловую скорость вращения вальцов с вектором входных воздействий, такова:
С 2 m ( 5 ' I - A m ) 1 B 3 =
___________________ a 21 • b 11 ___________________ 2 . .
a 12 • a 21 — a 11 • a 22 - 5 + a n • 5 + a 22 • 5
______________ b 22 • ( a 11 - 5 ) ______________ 2 . .
a 12 • a 21 — an • a 22 - 5 + an • 5 + a 22 • 5
Используя полученные передаточные матрицы, введем передаточные функции, определяющие в динамике изменение давления в гидравлической подсистеме и изменение скорости вращения вала гидромотора в гидромеханической подсистеме.
Передаточная функция, определяющая изменение давления относительно изменения управляющего воздействия W pu ( 5 ):
wd (S s ) = ——; wd (S s ) = puv и s s ) puv
______________ b ii "S s - a 22) ______________ 2 s — S a ii + a 22 )" s — a i2 " a 21 + a ii " a 22
Передаточная функция, определяющая изменение давления относительно изменения воз-
ТТЛ / X мущающего воздействия Wpm (5):
W pm S s ) = P M; W pm S s ) = 2 ,-------- A a 12 b 2 2-------------
M ( s ) s — ( a ii + a 22 )" s — a i2 " a 21 + a ll " a 22
Передаточная функция, определяющая изменение угловой скорости вращения вальцов относительно изменения управляющего воздействия W m u ( 5 ):
wto (S s ) = —; w» (S s ) =
ω u ω u U ( s )
_________________a 21 • bii_________________ s — (ац + a22)• s — ai2 • a21 + ац • a22
Передаточная функция, определяющая изменение угловой скорости вращения вальцов относительно изменения возмущающего воздействия Wtoт ( 5 ):
W = ^(s) ■ w =-----------b22 "(s—a11)----------- tom(s) ; ^mm (s) 2 ■
M ( s ) s - ( а ц + a 22 ) • s - a i2 • a 21 + a n • a 22
Здесь P ( 5 ), Q( 5 ), U ( 5 ), M ( 5 ) являются изображениями по Лапласу соответствующих временных функций: P(t ), ®( t ), u ( t ), M(t ).
Вычислительный эксперимент
Определены временные характеристики соответствующих передаточных функций: импульсная переходная характеристика изменения давления в функции управляющего воздействия kpu ( t ); переходная характеристика изменения давления в функции управляющего воздействия hpu ( t ); импульсная переходная характеристика изменения давления в функции возмущающего воздействия k pm ( t ); переходная характеристика изменения давления в функции возмущающего воздействия hpm ( t ); импульсная переходная характеристика изменения частоты вальцов в функции управляющего воздействия k m u ( t ); переходная характеристика изменения частоты вращения вальцов в функции управляющего воздействия h m u ( t ); импульсная переходная характеристика изменения частоты вращения вальцов в функции возмущающего воздействия k m m(t ); переходная характеристика изменения частоты вращения вальцов в функции возмущающего воздействия h m m(t).
Тип дорожного катка ДУ-96 [9] ОАО «Раскат» (г. Рыбинск, URL: raskat.yaroslavl.ru): вибрационный двухосный двухвальцовый с двумя приводными вальцами. Масса катка: m k 1 – эксплуатационная, mk 2 – конструктивная: mk 1 = 7200; mk 2 = 6600.
Диаметр гладкого вальца D b : D b = 1,07 м.
Ширина вальца L b (ширина уплотняемой полосы): L b = 1,5 м.
Линейное давление гладкого вальца соответственно P 1 b – переднего, P 2 b – заднего: P 1 b = 23000 H ∙ м–1; P 2 b = 24000 H ∙ м–1
Коэффициенты и их значения для уравнения состояния гидравлической подсистемы (гидравлического насоса, привода вальцов и передающей гидравлической линии): K – коэффициент упругости передающей гидравлической линии, K = 3 ∙ 10–11 el , el м3 ∙ ПА–1; Kloss – коэффициент, учитывающий потери давления в гидравлической линии, Kloss = 9,843 ∙ 10–11 м3 ∙ ПА–1 ∙ c–1; ωe – угловая скорость двигателя, ωe = 293,2 c–1; qp – максимальный рабочий объем насоса, qp = 35,8 ∙ 10–6 м3; qm – максимальный рабочий объем гидродвигателя привода вальца, qm = 287 ∙ 10–6 м3; Jb – момент инерции катка, Jb = 2058 кг ∙ м2.
Коэффициенты математической модели, рассчитанные на основе технических данных [5] вибрационного катка ДУ-96, таковы:
для первого уравнения состояния:
a ll = - K loss ■ K el ’=- 3,281е 1; a 12 = - 2 q m ' K el 1 =- 1,9133 - 10? Па ;
b11 = qp • шe • Kel-1 = 3,49904-108 кг • м-1 • с-3, для второго уравнения состояния:
a21 = 2qm • Jb-1 = 2,78912-10-7 м • кг-1; a22 =-1 с , b22 =-Jb 1 =-0,00049 кг 1 -м 2; Мnmax =14-103 Н-м.
Получены модели динамических (временных) характеристик системы управления средствами математической программной среды MathCAD.
Импульсная переходная k pu ( t ) и переходная характеристики h pu ( t )
k pu ( t ) = (175 - 10 6 + 99,25 - 10 6 • г ) • e ( - 2Д4 + 2,0^9 ' t +
+ (175-106 -99,25-106 • г)• e(-2Д4-2,0^Д't, hpu(-) J0kpu(t)dt.
Импульсная переходная kpm ( t ) и переходная характеристики hpm ( t )
kpm(t) = -32,38-106 • i • e(-2,14-2,°1'i)'t + 32,38-106 • i • e(-2Д4+2,01'i)-t, hpm(t) = J0 kpm (t)dt.
Импульсная переходная k.,(t) и переходная характеристики h.u(tt k (t) = -24,28. i. e(-2,14+2,01-i)■ t + 2428. i. e(-2,14-2,01-i)■ t, h® и ( t) = Jo kюк (t ) dt.
Импульсная переходная k m m ( t ) и переходная характеристики h m m ( t )
k ® m ( t ) = ( - 242,95 - 10 - 6 + 137,91 - 10 — 6 ■ i ) ■ e (^W t -- (242,95 - 10 - 6 + 137,91 - 10 - 6 ■ i ) ■ e ( - 2,14 - 2,01 - ' ) - t ,
t h® m (t ) = Jo kю m (t ) dt'
Графики временных динамических (импульсной переходной и переходной) характеристик показаны на рис. 2–5.
Полученные динамические характеристики показывают устойчивость системы управления объемным гидроприводом ходовой части дорожного катка.
Выводы
Решена задача построения математической модели процесса управления скоростью движения асфальтового катка с учетом динамики системы объемного гидропривода трансмиссии и сопротивления движению катка по дорожному покрытию. Применены современные методы разработки математической модели системы управления динамическим объектом в терминах переменных состояний и передаточных функций. Полученные решения необходимы kpu х 108, Pa х s-1 hpu х 108, Pa
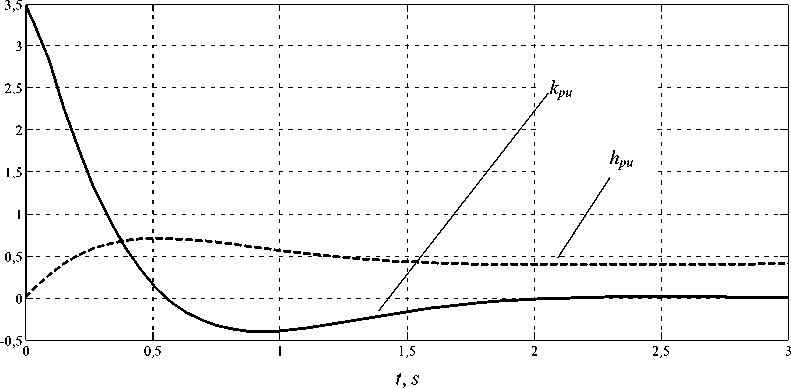
Рис. 2. Временные характеристики ku(t) и hpu(t) изменения давления в функции управляющего воздействия kpm, Pa х s-1 hpm, Pa
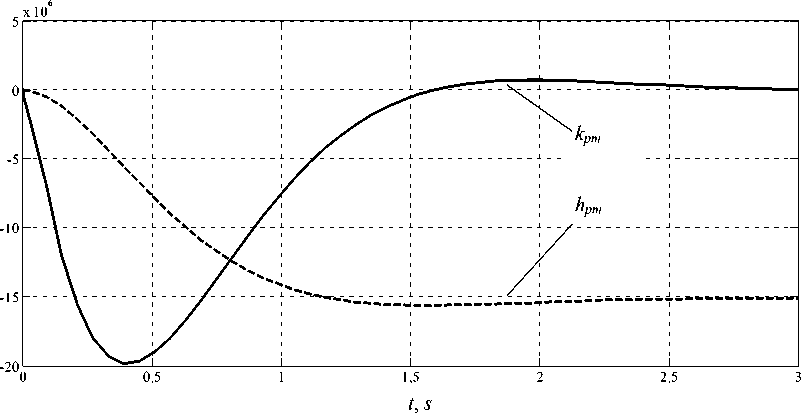
Рис. 3. Временные характеристики kpm(t) и hpm(t) изменения давления в функции возмущающего воздействия при моменте сопротивления Mn = 14000 H ∙ м kωu, s
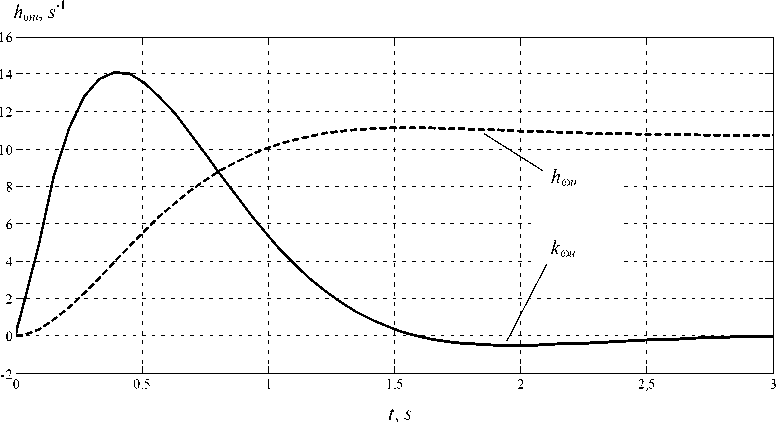
Рис. 4. Временные характеристики kωu(t) и hωu(t) изменения частоты вращения вальцов в функции управляющего воздействия kωm, s-2
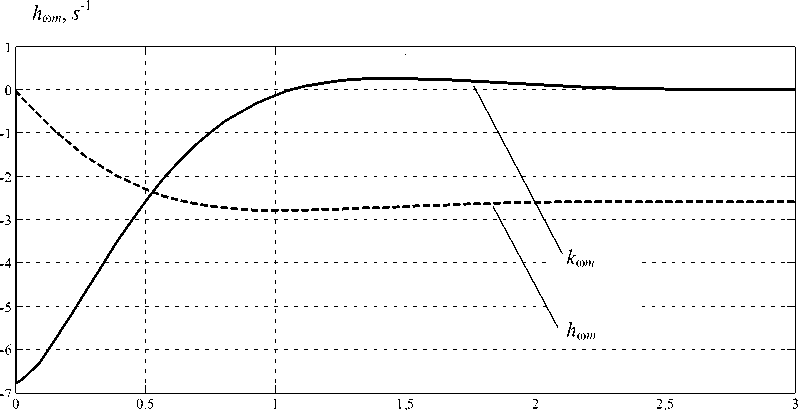
t , s
Рис. 5. Временные характеристики k„m(t) и h„m(t) изменения частоты вращения вальцов в функции возмущающего воздействия при моменте сопротивления Mn = 14000 H ∙ м при создании имитационной модели системы управления процессом уплотнения дорожностроительных материалов для дальнейшего синтеза системы автоматического управления рабочими режимами асфальтового вибрационного катка.
