Математическая модель прогнозирования влияния электромагнитного поля на устойчивость функционирования радиального подшипника, работающего на электропроводящей газовой смазке

Автор: Ахвердиев Камил Самедович, Лагунова Елена Олеговна, Ванеев Константин Андреевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 6 (67) т.12, 2012 года.
Бесплатный доступ
Представлен метод гидродинамического расчёта газодинамического радиального подшипника скольжения, работающего на электропроводящей газовой смазке. Решается вопрос аналитического прогнозирования устойчивости работы подшипника скольжения. Дана оценка влияния числа Гартмана, параметра сжимаемости газа и параметра, характеризующего напряжённость электрического поля, на основные рабочие характеристики подшипника.
Газовая смазка, радиальный подшипник, автомодельное решение, сила трения, расход, гидродинамическое давление, несущая способность, устойчивость
Короткий адрес: https://sciup.org/14249898
IDR: 14249898 | УДК: 321.896+06
Mathematical prediction model of electromagnetic field impact on operation stability of radial bearing working on conducting gas lubrication
The technique of the hydrodynamic calculation of the gasdynamic journal bearing working on the conducting gas lubrication is presented. The analytical prediction problem on the friction bearing operation stability is solved. The assessment of the effect of Hartmann number, the gas compressibility parameter, and the electric stress parameter on the bearing basic operation factors is given.
Текст научной статьи Математическая модель прогнозирования влияния электромагнитного поля на устойчивость функционирования радиального подшипника, работающего на электропроводящей газовой смазке
Введение. Как известно, подшипники с газовой смазкой в настоящее время широко используются в машинах вращательного движения. Анализ существующих работ показывает, что в этой области есть ряд нерешённых проблем. Это, прежде всего, проблема, связанная с аналитическим прогнозированием устойчивости функционирования радиальных подшипников, работающих на электропроводящей газовой смазке при наличии магнитного поля.
Цель настоящей работы — разработать аналитический метод расчёта радиального газодинамического подшипника, работающего на электропроводящей газовой смазке. Дать оценку влияния электромагнитного поля на основные рабочие характеристики подшипника и на устойчивость его функционирования.
Постановка задачи. Рассмотрим установившееся течение электропроводящей газовой смазки в зазоре радиального подшипника при наличии электромагнитного поля. Предполагаем, что подшипник неподвижен, а шип вращается с постоянной угловой скоростью ω.
Будем исходить из уравнений «тонкого слоя» для вязкой несжимаемой жидкости при наличии электромагнитного поля.
Основные уравнения и граничные условия. Запишем для нашей задачи уравнение движения газовой смазки, уравнение неразрывности и уравнение состояния [1]:
dP n d2U0
- oB(E - ue B ),
---= 0, M---1- =- dr' dr'2r
P = p ' RT , — (p ' ur,) + 5-^ + —— (p ' ue ) = 0, , 8 r'V Г Г 8 0 ( 0)
где u r - ,u0 — компоненты вектора скорости; Р — гидродинамическое давление в смазочном слое; E = { 0,0, E } — вектор напряжённости электрического поля; B = { B ,0,0 } — вектор магнитной индукции; σ — электропроводимость газа; ρ — плотность; R — удельная газовая постоянная; μ — динамический коэффициент вязкости; r ’, θ — полярные координаты.
Функции E ( r' ,0 ) и B ( r' ,0 ) считаем заданными, удовлетворяющими уравнениям Максвелла [2, 3]:
divB = 0, rotE = 0. (2)
Эти уравнения удовлетворяются при
_ „ ф' ( 9 )
E = const , B = ——,
Г
где ф ' ( 9 ) — заданная радиальная функция.
В полярной системе координат с полюсом в центре шипа уравнения контура и подшипника приближённо можно записать в виде
Г = r0, Г = r 1 + e cos 9, (4)
где r 0 — радиус шипа; r 1 — радиус подшипника; е — эксцентриситет.
Система уравнений (1) решается при следующих граничных условиях:
и r, = 0, u9 = 0 при Г = r 1 + e cos 9;
P
U r , = 0, и ш г. при r = Г о ; P ( 0 ) = P ( 2n ) = -. .
Pа
Перейдём к безразмерным переменным по формулам:
U r , = w5 u , U 9 w r . u, r = Г о + 5 r , 5 = r - Г о , p ( 0 ) = p ( 2n ) , P = P a P, p ' = p p, p = p , ф ' = фф.
Подставляя (6) в (1), с учётом (3) и (5) будем иметь с точностью до членов O I — I , O I —
I r 0 ) I r 0
d2 U 1 dp . 2 d / x d / x n —T = V^T- А ф - N Jф2,—(p u ) + — (pu) = 0, d r 2 Л d9 d rv 7 d9v 7
e и = 0, и = 0 при 1 + ncos 9; и = 0, и = -p при r = 0; п = —, δ
μωr2 где Л = £ paδ2
параметр сжимаемости газа;
A o52 E p* ............ „ _
A = —; — параметр, характеризующий напря- r02μω
σδ2φ жённость электрического поля; N = —Ат μ r 0 2
число Гартмана.
Точное автомодельное решение задачи. Точное автомодельное решение задачи (1)—(7) будем искать в виде:
p u = -d ^ + U ( r ,9 ) , pu = | ^ + V (r ,9 ) , p = -—ф0— -h h ( 9 ) = 1 + ncos9. 5 9 v d r v ' 1 + п cos 9 v
Подставляя (8) в (7) получим следующие выражения:
а 3Ф 2 5 Ф d V 2 21/ p dp p A ф0
+ Nфг + + NфгV = ^-^- dr3 dr dr2 Л d9 h (9)
d U d V n — + ^r = 0. d r d 9
Для решения системы уравнений (9) воспользуемся следующими условиями:
U = u(^ ) nsin9; V = U ( ^ ) ; ^ = ^ ^; V = Ф ( ^ ) ,
Подставляя (10) в (9), придём к следующей системе обыкновенных дифференциальных уравнений:
p dp = C i , C 2 , p A P 0 du d O, = 0
Λ d θ h 2 h 3 h , d ξ d ξ ,
[ d 3 Ф M 2 d Ф
< d Er + N ф0 d^ = C 2 , 4 d 2 U M A
+ N ф 0и = C i .
Граничные условия для решения системы обыкновенных дифференциальных уравнений (11) будут следующими:
~
~
Ф ' ( 0 ) = 0, ф ' ( 1 ) = 0, u ( 0 ) = 0, u ( i ) = 0, и ( 0 ) = — p , и ( i ) = 0, 1 P j и d E = 0, P ( 0 ) = P ( 2n ) = -д- •
Решая линейные дифференциальные уравнения второго порядка с правой частью (11), с учётом граничных условий (12) найдём выражения для Ф ' и U :
Ф ' = C2
sin ( ф0 V N E ) ( cos ( ф0 V N ) — 1 )
sin ( Ф о V N ) N p 0
-
_ cos ( ф0 V N E ) c
C + -2
2 N φ 20 N φ 20
sin ( ф0 V N E ) ( cos ( ф0 V N ) pф20 N + cos ( ф0 V N ) Ci sin ( ф 0 V N ) Nфг о
-
C i ) cos ( ф 0 V N E ) ( pN v 0 + C i ) ^^^^— — ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^—
N φ 20
~
+ C t. N φ 20
~
Из условия j U dE = 0 найдём C i:
где Ai = —
N 2ф 0 ^ cos ( ф о V N ) 2
— cos
— 2N cos ( ф0 V N ) + N + N cos ( ф0 V N )
C = A - P , ( фо V N ) + sin ( фо V N ) 2 V
—
sin ( ф0 V N ) N 3/2 ф0 + sin ( ф0 V N ) N
.
Для нахождения безразмерного гидродинамического давления приходим уравнению:
к следующему
~ ~
PdP = C l + C + PA P 0
Λ d θ h 2 h 3 h
Интегрируя уравнение (13) от 0 до θ, будем иметь
.
P =
i + 27 P a j(
P - 0 V
~ ~
C + C + A pp j d Q. h 2 h3 h I
Решение интегрального уравнения (14) будем искать методом последовательных приближений, полагая в качестве первого приближения р 0 = 1. С точностью до О (Λ2) для p 1 получим следующее выражение:
- => P P a 1
V
~
A i ^C2^ +4 ф 0 Ъ" h T + h 3 + — d® •
h
V
Из условия р (0) = р (2п) с точностью до О (п2) найдём С 2:
C 2 = — 4 ф 0 — 4 .
Тогда выражение для гидродинамического давления р 1 с точностью до О (η2) примет вид:
Pi = А I- Т ^-Рд + Pa Л Ainsin® + Pa 2Л Aфоnsine ] • pa Pд
Проекции главного вектора вещества смазок W = ^ R j + R y на шип определяется формулами:
2π 2π
R x = — г 0 J P sin6 d 6; Ry = — г 0 J P cos 6d6
Заметим, что в силу периодичности давления Р и чётности cosθ второй интеграл соответственно равен нулю. Первый интеграл проще вычислить по частям:
2π 2π 2π
R x = — Г 0 J Pd ( — cose ) = rP cos6| 0" — Г 0 J— cos6 d 6 = — Г 0 J -^cos6 d 6.
0 0 d θ 0 d θ
Подставляя выражение для гидродинамического давления в выражение (15), найдём выражение для несущей способности подшипника:
W = R x
( Дп + 2 Д ф о + З Д ф о П ) .
Найдём силу трения по формуле:
L =
d e = ^И0 ) d 6 =
5 0 б 0
2μω r 0 δ
к
( a + A 0 ) sin ( Ф 0V N ) _1+ Pg"
Ф0 T N ( cos ( Ф0 V N ) + 1 ) p^a 2
Найдём расход смазки по формуле:
Q = pto Г о б / Ф ' ( 5 ) d =
= P to Г ,б
С2 |— 2cos ( Фо^ ) N + N + cos ( Фо^ ) N |
N5/2 sin ( V o V N ) Ф 0
— P ' to r . 5
С 2 | N 3/2ф 0 sin ( v o V N ) + sin ( V o V N ) N |
N 5/2 sin ( ф о л/ N ) Ф0
.
Решение задачи об устойчивости. Решение этой задачи приводится на основе следующего безразмерного уравнения движения шипа:
d2ε dT2
d2Ф dT2 =
—
-^+ + ω2 Mr 0
R y εω2 Mr 0
—
1 Г го E к to
ω
ω
I I dФ I
| cos Ф + E I dT I ,
. . 2 ( dE IГ dФ sin Ф — - eк dT JкdT
.
e
Здесь e =----- — относительный эксцентриситет; Т = tot; t — время; to — угловая скорость вра- ri — Г0
1/ r
I g । щения шипа; е — эксцентриситет; r — радиус шипа; М — масса шипа; to = — ; б — радиаль- к б J ный зазор; g — ускорение силы тяжести; Rx и Ry — компоненты вектора поддерживающей силы; Ф — угол наложения.
Явные выражения для R x и R y , приведённые выше, показывают, что R x и R y существенно зависят от следующих безразмерных параметров: параметра сжимаемости газа Λ, параметра А , характеризующего напряжённость электрического поля, и параметра N , характеризующего число Гартмана. Используя выражения для R x и R y , можно получить численное решение системы (19).
Компоненты ускорения шипа
d 2ε d 2 Ф
и dT2 dT2
представляют собой явные функции параметров
d ε dФ ε, Ф , dT , dt ,
Λ, A, N . Уравнения (19) записываются в стандартной форме первого порядка и решаются с помощью многознакового метода, разработанного Гиром [4]. После получения реше- ния уравнений движения для заданных значений ε, Ф
d ε dФ
, dT , dt ,
Λ, A , N устойчивость рас-
сматриваемого движения определяется визуально по графику. Некоторые модели движения шипа приведены на рисунках 3 и 4. На рис. 3 представлено устойчивое движения шипа при следующих условиях n = 0,01; En = 0,5; “ = 2,4; Ф = 0,001; л = 0,25; A = 0,6; N = 0,4. На рис. 4 представле-0ω но неустойчивое движение шипа (е0 = 0,8;
“ = 2,5; Ф = 0,001; Л = 0,25; A = 0,25; A = 0,1; ω
N = 0,2).
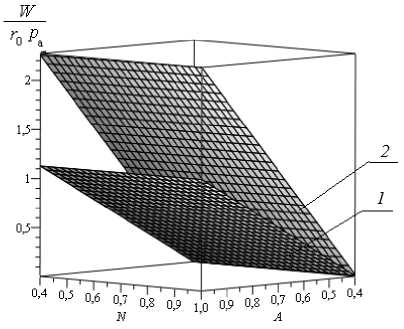
Рис. 1. Зависимость безразмерной несущей способности
W от числа Гартмана, параметра сжимаемости газа и r0pa
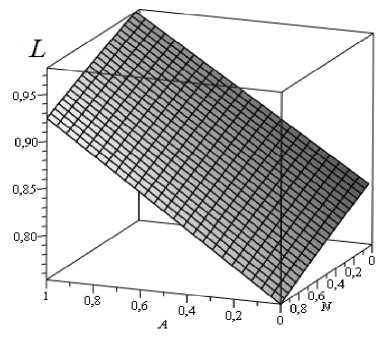
Рис. 2. Зависимость безразмерной силы трения L от числа Гартмана и параметра A , характеризующего напряжённость электрического поля
параметра A , характеризующего напряжённость электрического поля. 1 — Λ = 0,25; 2 — Λ = 0,5
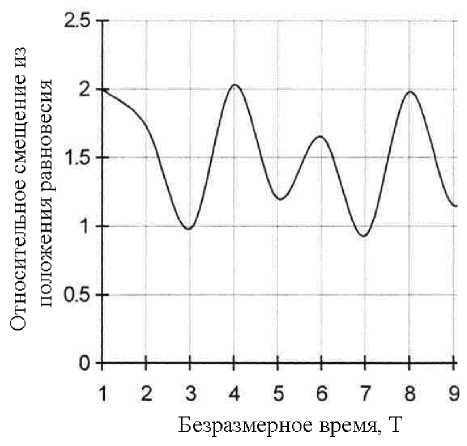
Рис. 3. Движение центра шипа при моделировании устой- чивого состояния
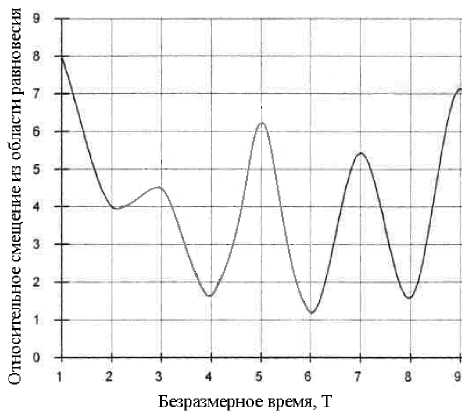
Рис. 4. Движение центра шипа при моделировании неустой- чивого состояния
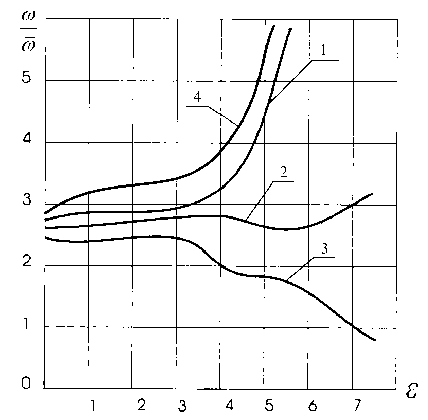
1 — η = 0,0001, А = 0, N = 0; 2 — η = 0,0007, А = 0, N = 0; 3 — η = 0,01, А = 0, N = 0; 4 — η = 0,0001, А = 0,5, N = 0,4 Рис. 5. Область устойчивости движения шипа
Результаты для некоторых значений Ф , ε, Λ, A и N приведены на рис. 5. Все точки, которые лежат ниже кривых, соответствуют устойчивому движению, а все точки, которые лежат выше этих кривых, соответственно — неустойчивому движению шипа. Графики устойчивости определяются такими точками (ω/ ω ), которые являются неграничными, т. е. соответствуют орбите шипа.
Выводы. Результаты численного анализа аналитических выражений (16)—(18) для основных рабочих характеристик радиального подшипника показывают:
— Число Гартмана не оказывает существенного влияния на несущую способность подшипника (рис. 1). С увеличением параметра А , характеризующего напряжённость электрического поля, и параметра сжимаемости газа имеет место значительное увеличение несущей способности.
— С увеличением параметра А , характеризующего напряжённость электрического поля, безразмерная сила трения возрастает (рис. 2), а с увеличением числа Гартмана уменьшается. Принимая во внимание решение для малого числа приближений, параметр сжимаемости газа не оказывает существенного влияния на безразмерную силу трения.
— С увеличением числа Гартмана расход смазки резко уменьшается. При малых значениях с увеличением параметра А , характеризующего напряжённость электрического поля, расход смазки незначительно возрастает. Принимая во внимание решение для малого числа приближений, параметр сжимаемости газа не оказывает существенного влияния на расход смазочного вещества.
— Из приведённых на рис. 5 зависимостей следует, что в случае электропроводящей газовой смазки область устойчивости движения шипа расширяется.
Список литературы Математическая модель прогнозирования влияния электромагнитного поля на устойчивость функционирования радиального подшипника, работающего на электропроводящей газовой смазке
- Ахвердиев, К. С. Основы совершенствования тяжелонагруженных узлов трения транспортных систем/К. С. Ахвердиев, В. И. Колесников, В. М. Приходько. -Москва: Маршрут, 2005. -336 с.
- Тамм, И. Е. Основы теории электричества/И. Е. Тамм. -Москва: Наука, 1989. -504 с.
- Терлецкий, Я. П. Электродинамика/Я. П. Терлецкий, Ю. П. Рыбаков. -Москва: Высш. шк., 1990. -353 с.
- Самарский, А. А. Численные методы/А. А. Самарский, А. В. Гулин. -Москва: Наука, 1989. -432 с.
