Математическая модель вязкопластичной смазки подшипников скольжения с деформируемой опорной поверхностью

Автор: Ахвердиев Камил Самедович, Колесников Игорь Владимирович, Мукутадзе Мурман Александрович, Семенко Инна Сергеевна
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 8 (69) т.12, 2012 года.
Бесплатный доступ
Даётся метод расчёта радиального подшипника с деформируемой опорной поверхностью на основе аналога уравнения Рейнольдса для вязко-пластичной смазки и уравнения Ламэ для случая «тонкого слоя». Предлагается метод, позволяющий формировать точное автомодельное решение рассматриваемой задачи. Полученные аналитические зависимости позволяют оценить влияние безразмерного параметра пластичности и упругогидродинамического параметра на основные рабочие характеристики подшипника. В результате установлено, что с увеличением значений параметра пластичности и упругогидродинамического параметра, значения несущей способности и силы трения возрастают. В предельном случае, когда упругогидродинамический параметр стремится к бесконечности, значение несущей способности подшипника и сила трения стремятся к соответствующим значениям для подшипника с жёсткой опорной поверхностью. В принятом в работе приближении значение несущей способности и силы трения прямо пропорционально параметру пластичности.
Опорная поверхность, подшипники скольжения, вязкопластичная смазка, деформация, упругогидродинамический параметр, несущая способность, сила трения
Короткий адрес: https://sciup.org/14249935
IDR: 14249935 | УДК: 51:621.891+06
Mathematical model of viscoplastic lubrication of friction bearing with deformable base
The analysis technique of the radial bearing with a deformable base on the ground of Reynolds equation analog for viscoplastic lubrication, and of Lame equation for ‘thin layer’ case is given. The technique permitting to form the accurate self-similar solution to the problem considered is offered. The obtained analytical dependences allow estimating the effects of the nondimensional plasticity parameter and the elastic hydrodynamic parameter on the bearing principle operation factors. The results show that the bearing capacity and the frictional force values grow with the increase of plasticity parameter and the elastic hydrodynamic parameter values. In the limiting case when the elastic hydrodynamic parameter goes to infinity, the bearing capacity value and the frictional force go to the proper values for the bearing with a rigid base. In the admitted approximation, the bearing capacity and the frictional force value are directly proportional to the plasticity parameter.
Текст научной статьи Математическая модель вязкопластичной смазки подшипников скольжения с деформируемой опорной поверхностью
Введение. Как известно, применяемые в настоящее время жидкие смазочные материалы (масла) состоят из масляной основы (базового масла) и композиции присадок, придающих маслам необходимый уровень функциональных свойств [1, 2]. Добавки полимеров с высоким молекулярным весом придают маслам вязкопластичные свойства. Работа подшипников, работающих на вязкопластичных смазках, достаточно изучена [3—6]. Анализ этих работ показывает, что в выполненных исследованиях опорная поверхность подшипников считается абсолютно жёсткой.
В области подшипников с жидкостной плёнкой смазки появилось новое направление подшипников с нежёсткой опорной поверхностью. Жёсткость такой поверхности имеет такой же или даже меньший порядок величины по сравнению с жёсткостью плёнки смазки. Подшипники с нежёсткой поверхностью имеют явные преимущества по сравнению с подшипниками жёсткой опорной поверхностью. Эти преимущества — допустимость больших несоосностей и деформации рабочей поверхности, а также терпимость к присутствию посторонних частиц между рабочими поверхностями. Кроме того, податливость эластомера под действием давления смазки приводит к появлению своего рода губы, ограничивающей утечку сдавливающей смазки из подшипника.
Таким образом, в условиях уменьшенного смазкой питания подшипник с нежёсткой поверхностью может сохранить гидродинамическую или гидростатическую плёнку смазки. В этом отношении он значительно превосходит подшипник с жёсткой опорной поверхностью. Целью данного исследования является оценка рабочих характеристик такого подшипника и, в последующем, сравнение их с хорошо известными характеристиками подшипника такого же типа, но имеющего жёсткую опорную поверхность.
Постановка задачи. Рассматривается установившееся движение вязкопластичной смазки в зазоре радиального подшипника с податливой опорной поверхностью. Шип вращается с угловой скоростью со, а подшипник неподвижен. В полярной системе координат (г, 0) с полюсом в центре шипа уравнения шипа и деформированного контура опорной поверхности запишутся в виде г' = г0, г' = rY + ecos0 + аф(0).
Здесь г0 — радиус шипа; а — радиус подшипника; е — эксцентриситет; аф(0) — функция, характеризующая деформацию опорной поверхности подшипника.
При оценке влияния деформации опорной поверхности подшипника на его основные рабочие характеристики ограничимся максимальным значением функции аф(0). Введём обозначения ар(е) = а<р*; при 9 е [о, 2л] ар* = тахар(э).
Основные уравнения и граничные условия. Будем исходить из безразмерных уравнений движения вязкопластичной смазки для случая «тонкого слоя» и уравнения неразрывности, которые получаются из уравнений Генки-Ильюшина методом оценок
d2U dp . ди ди п
—г = т^- + А — + -л- = 0 dr2 de dr 50
Система уравнений (1) решается при следующих граничных условиях
(/=0, и = 0 при Г = 1+Г|СО50
и = -1, и = 0 при г = 0; р(0) = Р(2п) = -^-
е х х , рсог2
Здесь п = $; б = г, + аф - г0 ; и,, = шби, ие = шгои — компоненты вектора скорости; р' = ^2° р —
, х . 2тпб2 _ „ _ гидродинамическое давление, г' = гп+ог; А =—У—--безразмерный параметр, обуславливаю-ЦСОГр щий вязкопластичные свойства смазки; рД — давление питания; т0 — предельное напряжение сдвига.
К уравнению (1) необходимо добавить безразмерную систему уравнений Ламэ для «тонкого слоя»
^^ = 0, ^- = 0. dr*2 5г*2
Здесь в области занятой упругим слоем размерные величины и'г, и^ связаны с безразмерными соотношениями
u'r, =U*Ur,, Ug =U*Ug, Г' = rx +6/*, бт =r2 -rlz
где и* — характерная величина компонента вектора перемещений; r2-ri — толщина упругого слоя.
В переменных (г, 6) и (г*, 6) уравнение недеформированного контура, прилегающего к смазочному слою, можно записать в виде
■^- + П cos 0 = ^(0), г* = ri! cos 0 = Л2 (0), П = |-, Ф =у-
Уравнение деформированного контура и внешнего контура упругого слоя прилегающего к жёсткой поверхности подшипника соответственно запишется в виде
г = 1 + П cos 0 = Л3 (0), г* =1+ П1 cos0 = Л4(0).
Система уравнений (3) решается при следующих граничных условиях
N—§-dr*
Эи "dr
.. 9иг,
, М—г- r=hv^ ^Г
^' Уе1г-=Л4(6) uAr=h 2(В) О'
где
N G,W6. „ G^l + a^u'^ мсогцб/ (1-а)ро)г02б1 '
Gr — модуль сдвига; о — постоянная Мусхелишвили; р = max р, 9 е [0, 2п]; р — безразмерное гидродинамическое давление в смазочном слое радиального подшипника с жёсткой опорной поверхностью.
Граничные условия (7) означают равенство касательных и нормальных направлений на недеформированной упругой поверхности подшипника, прилегающей к смазочному слою.
Интегрируя первое уравнение смазки (3) с учётом граничных условий (7), будем иметь
Г М М ’
Воспользуемся приближённой формулой
Ir-^fe)1
С учётом формул (5) и (6) получим
аф* Р б ~ М
Из уравнения (9) с точностью до членов
для аф* получим следующее приближённое
уравнение
ЭД ~~j^\r^ r*r
(Ю)
Из формулы (10), как и ожидалось, следует, что отношение максимального значения деформации к радиальному зазору прямо пропорционально безразмерному максимальному давлению и обратно пропорционально упругогидродинамическому параметру М. При М -ж аф* -> 0.
Точное автомодельное решение задачи (1)—(2) будем искать в виде
« = ”Ч^),о = -^+1/(г,е),Ф = Ф(у,« = ^
v = »®h-(eV^,^A = ^^-HD
Подставляя (11) в (1) и (2) придём к следующей системе обыкновенных дифференциальных уравнений и граничных условий к ним
Ф” = с2, u" = cv У-^и' = 0(12)
Ф'(0) = 0; Ф'(0) = 0, 17(0) = -1, и(1) = 0, 5(0) = 0, б(1) = 0; j(7(^ = 0.(13)
о
Решение задачи (12)—(13) легко находится непосредственным интегрированием. В результате будем иметь
Ф' = ^р-У, ОД^у-^-ф-!,(14)
где q = -б, константа с2 в дальнейшем определяется из условия /:(0)=/:(2п).
Гидродинамическое давление с учётом (14) определяется из последнего уравнения системы (11). С точностью до членов С(п3) для определения Р приходим к уравнению
^■ + Д = -6^1-2ncos6 + |n2 +^cos29j + c2(l-3ncos0 + 3n2 +3q2cos26)(15)
Из условия периодичности гидродинамического давления в принятом нами приближении для константы с2 получим следующее выражение с2 =Д + 6-ЗДп2-9п2(16)
Интегрируя (15) с учётом (16) будем иметь р = —бп sin 6 — 3/4г| sin 6 + 9п2 sin 26 + — q2 sin 26 + —(17)
' 2
где р = р(6) при 6 = 61Z где 61 является корнем уравнения
-бпсозб! -ЗЛпсозб! +18n2cos261 н-ЗД^соэгб! =0, п = е/(г1 -г0).(18)
Перейдём к определению безразмерной несущей способности и безразмерной силы трения. С учётом формул (14) и (17) для Ry — безразмерной составляющей несущей способности и без размерной силы трения получим следующие выражения
R 2п
R„ =—— = — f Р sin 6сУ6 = 6пп + ЗДг|п о

yVO)) Ч
+ —об = 2п + 4г|2п - Дп + - Дпг|2
^(б)/ 1 2 1
Численный анализ аналитический выражений (19) с учётом (17) и (18) проводился при следую'
щих значениях параметров
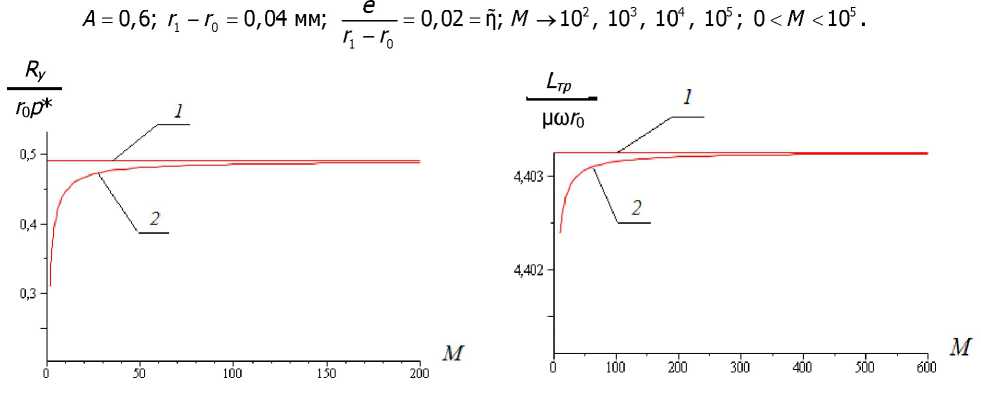
Рис. 1. Зависимость безразмерной несущей способности от Рис. 2. Зависимость безразмерной силы трения от параметра параметра М: 1 — Эф* = 0, А = 0,6; 2 — Эф* * 0, А = 0,6 М: 1 — Эф* = 0, А = 0,6; 2 — Эф* * 0, А = 0,6
Выводы. Из полученных выражений (19) и зависимостей, приведённых на рис. 1 и 2, следует, что:
-
1. Значение несущей способности и силы трения подшипника с податливой опорной поверхностью меньше, чем у такого же подшипника с жёсткой опорной поверхностью.
-
2. С увеличением значения упругогидродинамического параметра М, значение несущей способности и силы трения подшипника возрастает. При М -»<» несущая способность подшипника и сила трения стремятся к соответствующему значению для случая подшипника с жёсткой опорной поверхностью.
-
3. В принятом в работе приближении значение несущей способности и силы трения прямо пропорционально параметру пластичности А.
Список литературы Математическая модель вязкопластичной смазки подшипников скольжения с деформируемой опорной поверхностью
- Тзунг Ен На. О сдавливании плёнки неньютоновской жидкости/Тзунг Ен На//Теоретические основы инженерных расчётов. -1966. -№ 3. -С. 168.
- Кристенсен, Р. Введение в теорию вязкоупругости. -Москва: Машиностроение, 1974. -333 с.
- Ахвердиев, К. С. Нелинейная задача о неустановившемся движении вязкопластичной жидкости между шипом и подшипником//Доклады АН АзССР. -1977. -Т. 33, № 11. -С. 19-25.
- Ахвердиев, К. С. Нелинейные эффекты воздействия вязкопластичной смазки на шип подшипника скольжения//Доклады АН АзССР. -1977. -Т. 34, № 12. -С. 30-35.
- Ахвердиев, К. С. О движении вязкопластичной смазки в подшипнике//Доклады АН АзССР. -1977. -Т. 33, № 3. -С. 7-13.
- Ахвердиев, К. С. Нелинейные эффекты воздействия вязкопластичной смазки на устойчивость движения шипа в подшипнике//Вестник Московского университета. Серия 1. Математика, механика. -1978. -№ 5. -С. 86-92.
