Математическая модель зеркальной системы обсерватории "Миллиметрон" и описание метода предварительного обмера телескопа в рамках данной модели

Автор: Макаров С.Н., Верхогляд А.Г., Ступак М.Ф., Овчинников Д.А., Оберемок Ю.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.22, 2021 года.
Бесплатный доступ
Создается система контроля геометрии зеркал обсерватории «Миллиметрон» для работы в составе бортового комплекса научной аппаратуры. Система предназначена для контроля качества зеркальной системы космического телескопа и использования получаемых данных в качестве сигналов «обратной связи» для предварительных настройки и юстировки оптической системы телескопа в космическом пространстве. Задачей системы является определение многомерного вектора неизвестных параметров зеркальной системы телескопа по косвенным измерениям, получаемым в результате обмера телескопа 3D-сканированием. Создана математическая модель, численно описывающая процесс предварительного обмера зеркальной системы обсерватории «Миллиметрон» с использованием оптических контрольных меток на поверхности зеркальной системы. Линейная математическая модель позволяет связать фактические косвенные измерения зеркальной системы с неизвестными смещениями ее параметров, определяющими форму телескопа. Выведена формула для оптимального решателя обратной задачи в процессе предварительного обмера зеркальной системы. Описана методика обмера составляющих элементов телескопа в рамках его предварительной настройки. Обмер контрольных меток выполняется бортовым 3D-сканером, применяемым в конструкции системы контроля зеркальной системы. Проведен анализ ошибок при использовании оптимального решателя, получена ковариационная матрица для вектора ошибки оцениваемых параметров.
Математическая модель, зеркальная система обсерватории «Миллиметрон», система контроля, форма телескопа, контрольные метки, ЗБ-сканер
Короткий адрес: https://sciup.org/148322011
IDR: 148322011 | УДК: 53.083.8, | DOI: 10.31772/2712-8970-2021-22-1-151-165
Mathematical model of the mirror system of the Millimetron observatory and a description of the method of pre-measurement of the telescope within this model
A mirror geometry control system for the Millimetron Observatory is being created to work as part of the on-board complex of scientific equipment. The system is designed to monitor the quality of the space telescope’s mirror system and use the data received as feedback signals for pre-setting and tuning the telescope’s optical system in outer space. The goal of the system is estimation of the multidimensional vector of unknown parameters of the telescope’s mirror system by indirect measurements obtained as a result of the measurement of the telescope by 3D scanning. A mathematical model has been created, numerically describing the process of pre-measurement of the mirror system of the Millimetron Observatory using optical control marks on the surface of the mirror system. The linear mathematical model allows to link the actual indirect measurements of the mirror system with the unknown biases of its parameters, determining the shape of the telescope. A formula has been developed for the optimal reverse problem solver in the process of pre-measurement of the mirror system. The method of measuring the components of the telescope as part of its pre-setting is described. The measurement of control marks is based on a onboard 3D scanner embedded in the design of the mirror system control system. The error analysis was carried out using the optimal solver, and a covariance matrix was obtained for the error vector of estimated parameter.
Текст научной статьи Математическая модель зеркальной системы обсерватории "Миллиметрон" и описание метода предварительного обмера телескопа в рамках данной модели
Введение. Одним из основных направлений развития бортовых космических технологий является создание многозональных высокоапертурных зеркальных телескопов, обеспечивающих сбор и обработку информации в диапазонах спектра излучения от рентгеновского до миллиметрового. Примером этого служит проект космической обсерватории «Миллиметрон» (Спектр-М), рассчитанный для работы в миллиметровом и дальнем ИК диапазонах (70 мкм – 10 мм) с 10-метровым охлаждаемым (~4,5 K) криогенным телескопом [1–3]. Главной проблемой создания крупных телескопов является обеспечение качества изображения, что в свою очередь, требует разработки высококачественных и высокоточных методов контроля формы составных элементов их зеркальной системы [4–6]. В [7] представлен обзор состояния и тенденций развития космического телескопостроения за рубежом. Изложены результаты проводимых в ряде ведущих стран работ по проектированию и строительству оптических систем наблюдения за космосом. Рассмотрены находящиеся на орбите и строящиеся большие оптические телескопы с составными и гибкими зеркалами, управляемыми активными системами с целью устранения деформаций на всех этапах изготовления и эксплуатации.
Создание различных систем контроля формы составных элементов таких телескопов требует разработки математических моделей и алгоритмов работы данных контрольных систем [8–16]. В частности, в [8] изложена модель процесса юстировки составных зеркал высокоапертурных телескопов. На основе введенного понятия разностной поверхности с использованием разработанных алгоритмов геометрического и оптотехнического позиционирования зеркальных сегментов получены соотношения для оценки точности юстировки составных зеркал. В [16] кратко представлены методы юстировки и калибровки информационно-измерительных систем на борту космических аппаратов оптико-электронного и радиоэлектронного наблюдения.
Описываемая в настоящем сообщении система контроля зеркальной системы обсерватории «Миллиметрон» (СК ЗС) и не имеющие аналогов математическая модель и алгоритмы ее работы создаются для работы в составе бортового комплекса научной аппаратуры обсерватории «Миллиметрон» и рассчитывается на работу в условиях космического пространства. СК ЗС предназначена для контроля качества зеркальной системы (ЗС) космического телескопа и использования данных, получаемых СК ЗС в качестве сигналов «обратной связи» для предварительной настройки и юстировки оптической системы телескопа в космическом пространстве. В [17] на базе созданной математической модели описано моделирование работы бортового 3D-сканера при предварительном обмере зеркал обсерватории «Миллиметрон» с использованием оптических контрольных меток на поверхности зеркал. Настоящее сообщение посвящено описанию и анализу возможностей самой математической модели, применяемой в СК ЗС.
Основные положения и требования. Оптическая схема зеркальной системы обсерватории (телескопа) «Миллиметрон» приведена на рисунке.
Телескоп может быть представлен в виде физической модели, состоящей из множества оптических отражающих поверхностей (ОП) со стабильной формой. Совокупность всех ОП телескопа назовем зеркальной системой телескопа (ЗС). Примерами таких ОП являются (см. рис.): вторичное зеркало (ВЗ); переключающее зеркало (ПЗ); любая из панелей (фрагментов) многоэлементного параболоида главного зеркала (ГЗ).
Глобальная система координат (ГСК) телескопа определяется положением начала координат и координатными осями. Вершина параболоида главного зеркала (ГЗ) принимается за начало ГСК, в предположении идеальной формы параболоида ГЗ. Вектор оси X ГСК направлен вдоль оси параболоида ГЗ от его вершины в направлении вторичного зеркала (ВЗ). Вектор оси Y от центра переключающего зеркала (ПЗ) в сторону фокуса приемника, обозначенного как F 2 на рисунке. Ось Z однозначным образом дополняет оси X, Y, образуя полный ортогональный базис из векторов X, Y, Z ГСК, при котором ГСК является правой системой координат.
Однозначное положение каждой ОП как поверхности твердого объекта в пространстве определяется:
– выбранной базовой точкой на твердом объекте, содержащем ОП. Положение этой базовой точки объекта определено ее координатами в ГСК;
– тремя углами поворота объекта с ОП относительно его базовых осей в ГСК (углы Эйлера).
В итоге, положение каждой ОП в модели телескопа задается 6-ю параметрами – тремя углами поворота объекта, а затем радиус-вектором смещения базовой точки объекта в ГСК.
Знание положения каждой ОП телескопа по ее (6-и или иному достаточному количеству) собственных параметров (степеней свободы) означает, что геометрия (или конфигурация) всей ЗC телескопа точно и однозначно определена в рамках данной модели. В таком случае возможна оценки его оптического качества телескопа и его последующая настройка.
Обозначим полный набор параметров, описывающий положение всех ОП телескопа, как вектор (набор параметров) Х . Компоненты вектора содержат все параметры каждой ОП телескопа в его заданном состоянии. Так, например, если бы мы использовали в конструкции только 3 ОП, каждая описываемая 6-ю параметрами, то вектор Х состоял бы из 18 значений.
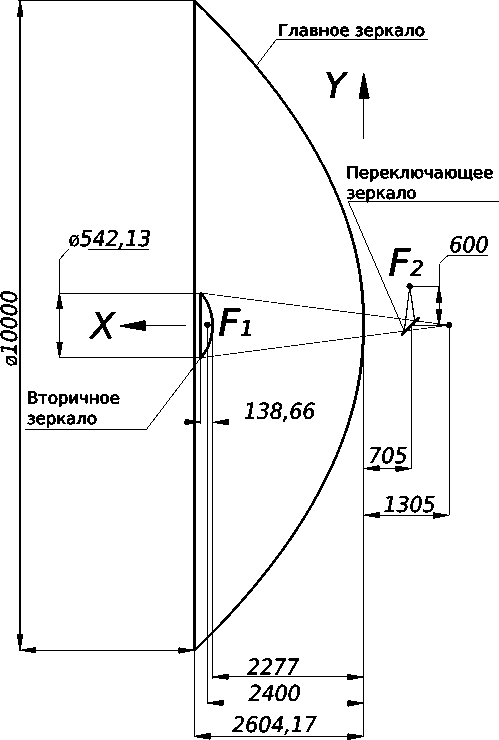
Оптическая схема зеркальной системы обсерватории «Миллиметрон». Расчетные характеристики: главное зеркало (ГЗ) – параболическое: радиус кривизны при вершине R ГЗ = 4800 мм; диаметр главного зеркала DГЗ = 10000 мм. Вторичное зеркало (ВЗ) – гиперболическое: RВЗ = – 254,7337 мм; DВЗ = 542,13 мм.
Расстояние между ГЗ и ВЗ – 2277 мм. Эквивалентное фокусное расстояние – 70000 мм. Расстояние от ВЗ до фокальной плоскости – 3582 мм. Квадрат эксцентриситета ВЗ е2= 1,147452
Optical diagram of the mirror system of the Millimetron Observatory. Estimated characteristics: main mirror (MM) – parabolic: curvature radius at the top of the R MM is 4800 mm; The diameter of the main mirror of the D MM is 10,000 mm. Secondary mirror (SM) – hyperbolic: R SM – 254.7337 mm; Distance between MM and SM – 2277 mm. Equivalent focal length – 70,000 mm. Distance from SM to focal plane – 3582 mm. Square of the eccentricity of the SM e2 = 1,147452
Обмер поверхности телескопа 3D-сканером, являющимся штатным элементом СК ЗС, является косвенным, так как не измеряет напрямую параметры вектора Х , но измеряет доступные для измерения геометрические величины, связанные с вектором Х . Поэтому задачей СК ЗС является определение вектора неизвестных параметров Х по косвенным измерениям, получаемым в результате обмера телескопа 3D-сканером. Для получения косвенной информации о геометрии телескопа в СК ЗС заложен 3D-сканер. 3D-сканер – это прибор, расположенный в «теплом отсеке» космического аппарата (КА), который может запускать тонкий измерительный (оптический) луч в ЗС телескопа через временное оптическое окно между «теплым отсеком» и «холодной зоной» и «наблюдать» за всеми ОП из точки F2.
На поверхностях обмеряемых ОП расположены оптические контрольные метки (КМ), которые могут быть обмерены лучом 3D-сканера. КМ представляет собой металлический шарик (или сферическое зеркало, с характерным диаметром не менее 10 мм).
3D-сканер состоит:
-
– из дальномерного канала (ДК), позволяющего измерять длину оптического пути между входным зрачком приемно-передающего объектива ДК и некоторой КМ ОП. Для этого к КМ, через последовательность ОП посылается измерительный луч, регистрируется его отражение назад и вычисляется оптическое расстояние между объективом 3D сканера и КМ;
-
– сканирующего зеркала (СЗ) 3D-сканера, задающего направление измерительного луча ДК для прицеливания на центр выбранной КМ.
Работа СК ЗС осуществляется следующим образом:
-
– выполняется обмер всех или подмножества КМ с использованием 3D-сканера. По каждой обмеренной КМ на выходе 3D-сканера формируются 3 канала измерения (с индексами m = 0, 1, 2): m = 0 – длина оптического пути ДК до КМ; m = 1,2 – два угла СЗ при точном прицеливании на КМ;
-
– в результате обмера множества КМ по ЗС телескопа получается набор измерений (по три измерения на каждую КМ), который обозначим как вектор Y ;
-
– известный (после обмера множества КМ) вектор Y будет использоваться для оценки и восстановления вектора неизвестных параметров телескопа Х .
Математическая модель, описанная ниже, дает представление, как связать неявные измерения КМ (оптических КМ) Y с неизвестными параметрами ОП телескопа Х .
Математическая модель. Положения всех ОП определяются вектором неизвестных параметров Х.
Пусть полное число неизвестных параметров телескопа по всем ОП (длина вектора Х) равно Р. Индекс индивидуального параметра: p = 0,...,P-1. В таком случае конкретное значе ние параметра из набора X = {xp} с выбранным индексом р обозначим как xp.
Поскольку положения КМ связаны с положением ОП, то мы можем ввести функцию измерения 3D-сканером положения КМ с индексом k, по каналу измерения m от вектора состояния телескопа Х как fm,k (X) = fm,k (x0, x1, "., xP-1 ).
Измерение 3D-сканером всех меток формирует известный вектор Y ( X ) = { fm k ( X ) } .
Вектор Y (совокупность всех измерений КМ по всем каналам 3D-сканера) зависит от вектора Х (всех неизвестных параметров ОП). Функции измерений fmk = fmk ( X ) = = fmk ( x 0, x 1 , ..., xP - 1 ) в зависимости от Х являются существенно нелинейными и определяются чертежами и текущей геометрией телескопа.
Поскольку при выводе космической обсерватории на орбиту и после раскрытия телескопа в рабочее положение, его геометрия искажается незначительно по отношению к его линейным и иным размерам, то нелинейные функции fmk ( ) можно считать постоянными по отношению к МАЛОМУ изменению аргумента Х , описывающего состояние ЗС телескопа, что и было подтверждено в результате численных экспериментов.
В таком случае, функции fmk ( ) можно считать известными и вычисляемыми по начальной конструкции телескопа в настроенном состоянии (на основе геометрических данных из конструкторской документации (КД) телескопа).
Подытожив, имеем следующее:
-
– положение телескопа однозначно определяется неизвестным вектором Х ;
-
– 3D-сканер СК ЗС может обмерять положения КМ (оптические контрольные метки), значения которых описываются функциями fmk ( X ) ;
-
- функции fmk ( ) известны (вычислением по чертежам КД) и предполагаются постоянными (независимыми от малого изменения аргумента Х ).
На основе этих предположений будем решать обратную задачу, т. е. определим расстройку параметров ОП ( Х ) от их исходного (идеального) положения по результатам неявного обмера множества КМ ( Y ) 3D-сканером.
Постановка задачи. Пусть телескоп настроен, это соответствует настроенному положению всех его ОП, которые мы обозначим как вектор X = { Xp } , состоящий из параметров Xp . Сами параметры Xp настроенного телескопа потенциально могут быть обмерены в заводских условиях, однако в этой информации нет необходимости, как это будет показано ниже.
При настроенном состоянии телескопа СК ЗС выполняет обмер всех ее КМ к = 0,..., K - 1 при помощи 3D-сканера по всем каналам измерения 3D-сканера m = 0,1,2 . Создается массив начальных измерений Y = { fmk } (для настроенного телескопа на Земле), который соответствует настроенному вектору параметров X ЗС:
fm * = f m , к ( X ) = f m , к ( x ), X 1 ,^, X P - 1 ) ,
c
Y = { f m , к ( X ) } .
Массив измерений настроенного телескопа Y запоминается. После вывода телескопа на орбиту и его раскрытия в рабочее положение, ЗС телескопа расстроена, поэтому в новом положении телескопа на орбите его параметры ОП X = { Xp } случайно смещены по отношению к исходному (настроенному состоянию) состоянию X = { Xp } :
x 0 = х 0 + А х 0 , х 1 = х 1 + А х 1 ,
или X = X + х ,
ˆ

= х р - 1 + А х p - 1
где х = { А х p } = { x p - x p }
– разностный вектор смещения параметров ОП. Полагается малость смещений х = {Ахp} = {Xp - Xp}.
Проведя обмер 3D-сканером СК ЗС всех КМ на орбите, получаем новый набор измерений положения КМ Y = { fm , к } :
f m , к f m , к ( X ) f m , к ( X 0 , X 1 ,-" X P - 1
Разница между полученными наборами измерений на орбите Y =
и настроенного в
заводских условиях Y = { fmk } может быть линейно аппроксимирована (через дифференциал многомерной функции или многомерный ряд Тейлора) [18] как
ˆ
х 0 , х 1 ,... х р - 1
a x 0
)
* А х 0 + ... +
d f m , к ( X 0 , х 1,- X P - 1 )
д хр - 1
* A x р - 1 ,
где
, _ df m , k ( x 0 , х 1,— x P - 1 )
частная производная функции измерения SD-сканера;
dm, k, p = axp x = X - X = {Axp} = {хp - xp} - вектор
изменения всех неизвестных параметров ОП (ЗС) от на строенного; y = Y - Y = {Afmk } = {fmk - fmk} - вектор изменения всех положений КМ обме ряемых SD-сканером.
В матричной записи выражение взаимосвязи измерений и изменения параметров будет выглядеть как
Переформулируем задачу следующим образом: Определить изменения положения ОП от идеального настроенного x = { A xp } = X - X по изменению положения КМ на орбите от их идеально настроенного y = { A f m k } = Y - Y .
При этом известна матричная зависимость (прямая задача) y = H • x, где H - вычисляемая по чертежам постоянная дизайн-матрица (6). Необходимо решить обратную задачу: X = x (H,y).
Решение задачи. Определим вектор первичных параметров (смещений) ЗС телескопа.
Первичные параметры смещения - это параметры телескопа, которые показывают, насколько тот или иной компонент ЗС смещен относительно своего исходного состояния (когда телескоп настроен в заводских условиях): x 1 . Длина вектора здесь определена по количеству — p 1,1
описываемых им параметров/ компонент. Так p 1 - количество параметров вектор x 1 описы- — p 1,1
вает. Здесь и далее примем обозначение под матричной переменной - означающее, что над
.-..
k, m скобкой – матричный элемент, имеющий k строк и m столбцов. Тем самым x1 – это вектор— p1,1
столбец длиной p1, или матрица размерности p 1 х 1 элемент.
Для полностью настроенной ЗС телескопа все параметры не смещены, т. е. равны нулю и, тем самым, все компоненты вектора x 1 равны нулю.
— p1,1
Определим вектор измерений (смещений) y телескопа, который создается при обмере —1 n ,1
(выполняемом СК ЗС) всех или подмножества КМ ЗС телескопа: y . — n ,1
Определим вектор шума измерений ε телескопа, который создается при обмере (выпол- — n ,1
няемом СК ЗС) КМ ЗС телескопа: ε . — n ,1
Определим первичную дизайн-матрицу H 1 , как матрицу, характеризующую модель ЗС '
n , p 1
телескопа и связывающую первичные параметры смещений x 1 , вектор измерений y и шум
—— p1,1
измерений ε в одном уравнении: — n,1
У = H1 • Х1 + $ . — — n,1 n,p1 p1,1 n,1
Матрица преобразования системных параметров в первичные параметры . Первичные параметры смещений x 1 непосредственно соотносятся положениям ОП, таким как панели ГЗ, — p 1,1
ВЗ и т. п. Системные параметры – это параметры, которые имеют обобщающую природу и могут влиять на группы первичных параметров. По сути это многомерная замена переменных. Обозначим системные параметры как вектор x . Число системных параметров или компонен- p ,1
тов вектора есть p . Чтобы математически формализовать преобразование обобщения парамет- ров, введем матрицу преобразования системных параметров в первичные параметры Ν та— , p1,p кую что x1 = N • x . Имеем:
— 1 p 1, p p ,1
У = H1 • Х1 + $ = H1 — ^— — —
n ,1 n , p 1 p 1,1
• N • x + $ =
— —
p 1 р 1, р p ,1
—
x 1 — p 1
H — n , p —
— 1 • N n , p 1 p 1, p
• x + $ . — — p,1 n,1
Поэтому дизайн-матрица H (с применением системных параметров) может быть выражена n,p как H = H1 • N . В таком случае связь измерений и системных параметров может быть выра-n, p "1 p 1, p жена формулой y — n,1
= H • x + £ . — — — n,p p,1 n,1
Случайный вектор изменения положения ОП x можно характеризовать его ковариацион- p ,1
ной матрицей [19] S = ST = Xkk • xm У Если мы полагаем, что параметры, составляющие p,p p,p вектор x , взаимно независимы, имеют нулевое среднее, тогда ковариационная матрица упро-p,1
щается и становится диагональной:
где стандартное отклонение индивидуального параметра с нулевым средним определяется как
- k = 7( x k "xk) k = 0, ..., Р - 1.
Поскольку измерения разных КМ всегда независимы друг от друга, то сам вектор шума измерений 3D-сканером £ имеет диагональную ковариационную матрицу n,1
n,1
Так, если имеются две КМ, пространственно близко расположенные в ЗС, то они имеют близкие по значению (практически одинаковые) систематические ошибки в каналах 3D-сканера, при их обмере. В таком случае применение дифференциальных измерений КМ, т. е. попарная разница расстояний или углов каналов 3D-сканера до этих КМ, существенно снизит систематическую ошибку измерения расстояний или углов 3D-сканера.
Чтобы формализовать такое преобразование общим способом (в виде линейной комбинации измерений), вводим матрицу преобразования первичных измерений D . Получаем новую заме- ну переменных, переводя первичные измерения y в дифференциальные и , как u = D • у. m ,1 m ,1 m, n nj
S n,1
Вводим эквивалентную дизайн-матрицу G связи системных параметров с дифференциальными m,p измерениями: G = D • H . Тогда u = G • x + X , где эквивалентный шум дифференциального m,p m,n n,p m,1 m,p p,1 m,1
измерения X при этом будет выражен через исходный шум первичного измерения £ m,1 n,1
как X = D • £ .
S S S m,1 m,n n,1
*------v------'
λ S m,1
Ковариационную матрицу дифференциального шума измерений можно выразить как
U = U T = cov X = cov D • £ - - - -
v m ,1 7
-
V m , n n ,1 7 m , n
( ^
= D • COV £
-
• DT ^-
V n ,1 у n , m
= D • Y • D T .
- - -^
m , n n , n n , m
Решение обратной задачи. Имеется выражение u = G • x + X , связывающее неизвестные m ,1 m , pp ,1 m ,1
системные смещения параметров ЗС x с вычисляемыми ( известными) дифференциаль- p ,1
ными измерениями КМ u . При этом эквивалентная дизайн-матрица G - вычисляема (из-m,1 m,p вестна) по известным D и H , где X - модифицированный вектор шума дифференциальных m,n n,p m,1
измерений. Он имеет известные статистические свойства, такие как нулевое среднее и вычисляемую (известную) ковариационную матрицу U = - = D ' Y ' DT • Напомним, что S - из-m,m m,m m,n n,n n,m p,p вестная ковариационная матрица разброса неизвестных параметров ОП x , характеризующая p,1
их первоначальный разброс/ расстройку ЗС.
По известным u , G , U , S необходимо найти наиболее точное решение уравнения m,1 m,p m,m p,p u = G • x + X , т. е. найти вектор неизвестных системных параметров x . - - - -- m,1 m, pp,1 m,1
Для решения задачи ищем матричный решатель (матрица) F такой, что оценка x неиз-p,mp вестного вектора системных параметров x по дифференциальным измерениям u есть p,1
x = F • u .
-
--
p ,1 p , m m ,1
При поиске матрицы F , необходимо подобрать ее таким образом, чтобы отклонение p , m
S x = x - x истинного смещения x и его найденной оценки x было минимально в статисти-
-
— - - - -
- p,1 p,1 p,1 p,1 p,1
ческом смысле. Определим это как

где ||a|| = ^ a k - норма вектора; ( ) - среднее значение от случайной величины. k
Опуская длинные промежуточные выкладки, приводим окончательную формулу для опти- мального решателя:
F = - p,m
г ^
G • S v m , p p , p у
T
G • S • G T
- - -^
V m , p p , p p , m
у
+ U m, m 7
p , m
m,m где (...)+ - псевдообратная матрица [20].
Анализ ошибок восстановления параметров. Случайный вектор ошибки восстановления неизвестных параметров S x - это разница между истинным неизвестным вектором системных p ,1
параметров состояния ЗС после вывода на орбиту x и оценкой x этого вектора, полученной p ,1 p ,1
по дифференциальным измерениям с использованием формулы (16):
S x = x - x . (17)
v v v p ,1 p ,1 p ,1
Ковариационная матрица для вектора ошибки
S x v p ,1
восстановления параметров по результа-
там вычислений имеет следующий вид:
А = cov S x
v p,p
V p,17
= Q • v
S • QT
Список литературы Математическая модель зеркальной системы обсерватории "Миллиметрон" и описание метода предварительного обмера телескопа в рамках данной модели
- Обзор научных задач для обсерватории «Миллиметрон» / Н. С. Кардашев, И. Д. Новиков, В. Н. Лукаш и др. // УФН. 2014. Т. 184, № 12. С. 1319-1352. Doi: 10.3367/UFNr.0184.201412c.1319.
- Space mission Millimetron for terahertz astronomy / A. V. Smirnov, A. M. Baryshev, S. V. Pilipenko et al. // Proc. of SPIE. 2012. Vol. 8442. P. 84424C. Doi: 10.1117 / 12.927184.
- Астрокосмический центр ФИАН, г. Москва [Электронный ресурс] : офиц. сайт. URL: http://millimetron.web2.ru/ru/ (дата обращения: 02.02.2021).
- Лукин А. В., Мельников А. Н., Скочилов А. Ф. Контроль зеркала контррефлектора телескопа «Миллиметрон» на основе использования синтезированной голограммы // Фотоника. 2016. № 5. С. 44-48.
- Разработка интерференционно-голографической ИК системы контроля формы центрального параболического зеркала космического телескопа обсерватории «Миллиметрон» / А. Г. Полещук, Р. К. Насыров, А. Е. Маточкин и др. // Труды «Интерэкспо Гео-Сибирь». 2015. Т. 1. С. 51-58.
- Система контроля геометрических параметров центрального зеркала космического телескопа «Миллиметрон» / А. Г. Верхогляд, В. М. Михалкин, В. А. Куклин и др. // Решетневские чтения : материалы конф. ; Сиб. гос. аэрокосмич. ун-т. Красноярск, 2014. Т. 1(18). С. 61-63.
- Кириченко Д. В., Клеймёнов В. В., Новикова Е. В. Крупногабаритные оптические космические телескопы // Изв. вузов. Приборостроение. 2017. Т. 60, № 7. С. 589-602. Doi: 10.17586/0021-3454-2017-60-7-589-602.
- Демин А. В., Денисов А. В., Летуновский А. В. Оптико-цифровые системы и комплексы космического назначения // Изв. вузов. Приборостроение. 2010. Т. 53, № 3. С. 51-59.
- Демин А. В. Математическая модель процесса юстировки составных зеркал // Известия вузов. Приборостроение. 2015. Т. 58, № 11. С. 901-907. Doi: 10.17586/0021-3454-2015-58-11901-907.
- Демин А. В., Ростокин П. В. Алгоритм юстировки составных зеркал // Компьютерная оптика. 2017. Т. 41, № 2. С. 291-294. Doi: 10.18287/2412-6179-2017-41-2-291-294.
- Wavefront calibration testing of the James Webb Space Telescope primary mirror center of curvature optical assembly / G. Olczak, C. Wells, D. J. Fischer, M. T. Connolly // Proceedings of SPIE. 2012. Vol. 8450. 84500R. Doi: 10.1117/12.927003.
- Algorithm and mathematical model for geometric positioning of segments on aspherical composite mirror / B. Conquet, L. F. Zambrano, N. K. Artyukhina et al. // Приборы и методы измерений. 2018. Т. 9, № 3. С. 234-242. Doi: 10.21122/2220-9506-2018-9-3-234-242.
- Батшев В. И., Пуряев Д. Т. Оптическая система и методика контроля позиционирования сегментов составного параболического зеркала радиотелескопа космической обсерватории «Миллиметрон» // Измерительная техника. 2009. № 5. С. 29-31.
- Пуряев Д. Т., Батшев В. И., Польщикова О. В. Метод контроля качества выпуклого гиперболического зеркала радиотелескопа космической обсерватории «Миллиметрон» [Электронный ресурс] // Инженерный журнал: наука и инновации. 2013. Вып. 7. URL: http://engjour-nal.ru/catalog/pribor/optica/833.html (дата обращения: 02.02.2021).
- Сычев В. В., Клем А. И. Алгоритм управления многоэлементным зеркалом на примере космического телескопа обсерватории «Миллиметрон» // Оптика атмосферы и океана. 2018. № 7. С. 578-586. Doi: 10.15372/А0020180712.
- Сомов С. Е. Юстировка и калибровка информационно-измерительной системы для определения ориентации спутника землеобзора и его наблюдательного оборудования // Известия Самарского научного центра РАН. 2018. Т. 20, № 1-1. С. 87-96. Doi: 10.24411/1990-5378-201800127.
- Математическое моделирование работы 3D-сканера системы контроля зеркальной системы обсерватории «Миллиметрон» [Электронный ресурс] / С. Н. Макаров, А. Г. Верхогляд, М. Ф. Ступак и др. // Решетневские чтения : XXIV Междунар. науч.-практ. конф., посвящ. памяти генер. конструктора ракет.-космич. систем акад. М. Ф. Решетнева (Красноярск, 10-13 но-яб. 2020 г.). Красноярск, 2020. Ч. 1. С. 101-102.
- Фихтенгольц Г. М. Курс дифференциального и интегрального исчисления. В 3 т. 8-е изд. М. : Физматлит, 2003. Т. I. 680 с. ISBN 5-9221-0156-0.
- Ширяев А. Н. Глава 2, § 6. Случайные величины II // Вероятность. 3-е изд. Cambridge, New York : МЦНМО, 2004. Т. 1. С. 301.
- Беклемишев Д. В. Дополнительные главы линейной алгебры. М. : Наука, 1983.
