Математические модели для задач анализа функционирования БИНС на стендах

Автор: Козлов Артем Викторович
Статья в выпуске: 3 (136), 2009 года.
Бесплатный доступ
В статье рассматриваются испытательные стенды для отработки БИНС, математические модели, описывающие функционирование на стендах, а также критерии близости эталонной и экспериментальной информации, полученной при отработке на стендах.
Математическая модель бинс, стендовая отработка бинс, алгоритм функционирования бинс
Короткий адрес: https://sciup.org/147154684
IDR: 147154684 | УДК: 629.12.053.13
Mathematical models for hardware-in-the-loop sins simulation
The article describes the hardware platforms for hardware-in-the-loop SINS simulation, mathematical models of SINS functioning during simulation, and criterions of likelihood of ideal and experimental information that was generated during SINS simulation.
Текст научной статьи Математические модели для задач анализа функционирования БИНС на стендах
Для отработки алгоритмов функционирования бесплатформенных инерциальных навигационных систем (БИНС) на земле имеется возможность использовать испытательные стенды, позволяющие реализовывать заданные движения. При установке БИНС [1] на такие стенды в качестве «пассажира» во время их движения ведется съём информации с датчиков и ее обработка в вычислительном устройстве с целью получения и хранения значений переменных навигационной информации в виде функций времени на заданном интервале. После проведения таких испытаний имеется возможность извлечь сохраненную инерциальную и навигационную информацию и сравнить ее с аналогичной эталонной информацией. А поэтому в целом до испытаний необходимо иметь модели эталонной инерциальной и навигационной информации, имитационные модели инерциальной информации и соответствующую этим моделям вычисляемую навигационную информацию [2]. И далее, вводя критерии близости моделей эталонной и вычисляемой информации, необходимо проверить правильность алгоритма функционирования и предъявить требования к точности численного интегрирования дифференциальных уравнений относительно этих переменных.
Испытательный стенд для БИНС, реализующий сложное движение, представляет собой трехосный карданов подвес и установлен в начальном положении в СК У0 так, как показано на рис. 1. На площад- ке внутренней рамки установлен блок инерциальной информации (БИИ), с которым связана СК О4У14У24У34, оси которой Y* параллельны соответственно осям Y^, а ее начало О4 относительно точки О (начала СК У3) определяется радиус - вектором R = ОО4 , который не изменяется по величине.
Стенд состоит из трех взаимосвязанных тел: наружной рамки 1, промежуточной рамки 2 и внутренней рамки 3, на площадке которой установлен БИИ.
Кинематические характеристики углового и поступательного движения БИИ, выраженные в проекциях в СК У0 для радиус вектора R , линейной V и угловой W скоростей:
" 3 _____
^=£<^,/ = 1,3;
=Т^^тлСиСк^кГ,-, j=\k=\l=\m=\
' 3 3 3 3
j=\k=\ /=1 m=l 3 3 3
J=\k=\l=\ где Qmjj - символ Леви-Чивита, Q - углы, С -матрицы направляющих косинусов.
Серия «Компьютерные технологии, управление, радиоэлектроника», выпуск 9
Kozlov Artem Viktorovich - post graduate student of mechano-assembly automation department of SUSU;
Частным случаем рассмотренного стенда является стенд на основе физического маятника, в котором вращается только наружная рамка вокруг своей оси. Система дифференциальных уравнений, характеризующих функционирование БИНС, в этом случае имеет вид:
" 3 3 ____
Су = II ^А, Cti^ = С», i,j = 1,3;
t=i /=1
з ___
" V, =Gi*y4CijApVi^ = V^i = \,3; (2)
7=1
д.=^,^0)=^0,»=й.
Еще одним типом стендов являются либо специализированные стенды, как например вести-булометрический стенд [3], установленный в ЮУрГУ, либо стенды, реализующие наиболее полную отработку навигационных систем [4].
Вестибулометрический стенд, адаптированный для испытаний БИНС, представляет собой механизм с тремя степенями свободы, способный воспроизводить плоско - параллельное движение БИИ в горизонтальной плоскости.
Кинематические характеристики углового и поступательного движения БИИ имеют вид:
' 3 3 ____
^=££^C»\z = l,3;
k=\j=\
-
3 3 3 ___
-
- k=lm=lj=l (3)
ззз _
^.=ИЫкз,тС^к +
1=1 m=l 7=1
ЧЕ^ -С®*Х®1)2р = й
Простейшими критериями близости эталонной и экспериментальной информации могут быть допустимые относительные погрешности по ориентации, скорости и координатам:
D^, ОГ, D^J, j = U (4)
с точностью до которых должны удовлетворяться неравенства:
Dy < Df, D^ < Df, D* < D^, ij = U, (5)
где
,d?
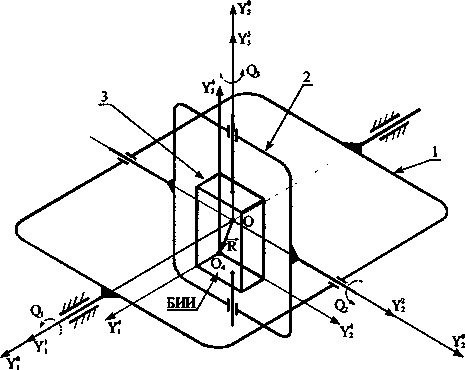
Рис. 1. Стенд на основе карданова подвеса
В формулах (6) введены обозначения Cy,V*,R* - это переменные навигационной информации, вычисленные на основе заданных кинематических характеристик объекта и стенда, т.е. точных функций, а Cy,V,,Rj - те же переменные, вычисленные по алгоритму функционирования БИНС, на вход которого вместо измеряемых БИИ переменных инерциальной информации поданы имитаторы этих переменных, вычисленные на основе тех же заданных кинематических характеристик объекта и стенда [1].
Список литературы Математические модели для задач анализа функционирования БИНС на стендах
- Щипицын, А. Г. Бесплатформенные инерциальные навигационные системы: уч. пособие/А. Г. Щипицын. -Челябинск: Изд-во ЧГТУ, 1993. -108 с.
- Щипицын, А. Г. Инерциальные навигационные системы (анализ функционирования и точности): уч. пособие/А. Г. Щипицын. -Челябинск: Изд-во ЮУрГУ, 1998. -116 с.
- Щипицын, А. Г. Система вестибулометрической диагностики. Математические модели и алгоритмы анализа/А. Г. Щипицын, П. Г. Щипицын. -Челябинск: Изд-во ЮУрГУ, 1997. -121 с.
- Manfred, R. Performance Testing of the Desdemona Motion System/R. Manfred, W. Mark, F. Philippus//AIAA Modeling and Simulation Technologies Conference and Exhibit, 20 aug2007.
