Математические модели работы перекидного лесопогрузчика с учетом наклона корпуса при наборе груза

Автор: Полетайкин В.Ф., Гуськов С.Ю.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки: Процессы и машины агроинженерных систем
Статья в выпуске: 1, 2015 года.
Бесплатный доступ
В статье разработаны математические модели, позволяющие определять и исследовать нагруженность технологического оборудования лесопогрузчика с учетом влияния конструктивных и эксплуатационных факторов (угловая скорость вращения стрелы, масса груза, угол наклона лесопогрузчика в продольно-вертикальной плоскости).
Лесопогрузчики гусеничные, лесопромышленные тракторы, технологическое оборудование, динамические нагрузки, математическая модель
Короткий адрес: https://sciup.org/14083990
IDR: 14083990 | УДК: 630.370
Mathematical models of the ghangeover logger work taking into account the body inclination in the freight gain
The mathematical models allowing to define and research the loading of the logger technological equipment taking into account the influence of the constructional and operational factors (angular speed of the lift arm rotation, mass of freight, the logger tilt angle in the longitudinal-vertical plane) are developed in the article.
Текст научной статьи Математические модели работы перекидного лесопогрузчика с учетом наклона корпуса при наборе груза
При дальнейшем подъеме происходит одновременное перемещение груза вокруг оси вращения стрелы и вращение лесопогрузчика с грузом относительно оси передней балансирной каретки до тех пор, пока задние балансирные каретки лесопогрузчика не встанут на грунт. В момент соударения задней части гусениц с опорной поверхностью лесопогрузчик резко перестает вращаться относительно оси переднего балансира, а груз продолжает вращение относительно оси поворота стрелы.
Это обуславливает возникновение дополнительных нагрузок как на технологическое оборудование, так и на ходовую систему базового трактора. Величина этих нагрузок зависит от массы груза, скорости его перемещения, свойств опорной поверхности погрузочной площадки, а также параметров кинематики и гидросистемы технологического оборудования
Для моделирования работы системы и определения величины возникающих динамических нагрузок в данном режиме необходимо составить расчетную схему и систему уравнений движения технологического оборудования и груза с учетом числа степеней свободы системы «базовый трактор - технологическое оборудование - груз», свойств груза, а также её математическую модель, описывающую движение системы (рис.)
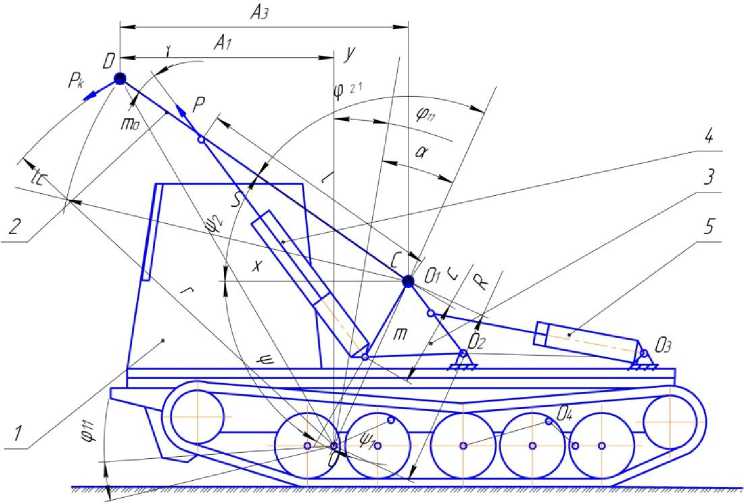
Расчетная схема системы «базовый трактор – технологическое оборудование – груз»: 1 – базовый трактор; 2 – стрела; 3 – поворотное основание; 4 – гидроцилиндр поворота стрелы;
5 – гидроцилиндр поворота основания
Расчетная схема системы представлена на рисунке. Принятые обозначения при составлении расчетной схемы и уравнений движения: т о - масса груза и подвижных частей технологического оборудования, приведенных к точке D; Р к - кориолисова сила инерции; Р - усилие на штоке гидроцилиндра поворота стрелы; l c - длина стрелы; S - длина гидроцилиндра поворота стрелы;, т - масса базовой машины и неподвижных частей технологического оборудования, приведенная к оси вращения стелы (к точке С); О , О 4 -оси вращения, соответственно, переднего и заднего балансиров базовой машины, r, R – радиусы инерции относительно оси О соответственно масс т о и т. Другие обозначения понятны из рисунка. Положение рассматриваемой системы в любой момент времени однозначно определяют параметры - фи, Ф 21 , которые и принимаются за координаты системы. Таким образом, система обладает двумя степенями свободы. Записываем уравнения Лагранжа второго рода:
d ∂ T ∂ T
— (---)-- dt дфи дф ц
= Q
∂ T ∂ T
— (---)-- dt дф^ др 21
= Q p 21
где Т - кинетическая энергия системы;
Ф 11, P i - перемещения центров масс (обобщенные координаты системы);
Q^ - сила, соответствующая координате р п;
Q - сила, соответствующая координате р 21;
Кинетическая энергия системы:
Т = T i + Т 2 , (2)
где T i - кинетическая энергия масс базового трактора и неподвижных частей технологического оборудования, приведенных в точку О 1 (рис.).
T 1 = 1 . m . r 2 . ^2 . (3)
Масса груза и подвижных частей рабочего оборудования, приведенная к точке D, совершает сложное движение относительно точки О, вследствие этого её кинетическая энергия представляет собой сумму кинетических энергий переносного и относительного движения.
Т 2 - кинетическая энергия массы груза и подвижных частей рабочего оборудования, приведенной к точке D.
T 2 = 1( m o • V D + m o • l C • ^ 221 , (4)
m o = m 21 + m 30 , (5)
где m 30 – масса жесткого груза, приведенная к концу стрелы;
-
V – абсолютная скорость точки D.
Абсолютная скорость точки D равна геометрической сумме переносной и относительной скоростей точки D.
V D = RR ' ф 11 + lC ( ф 11 + ф 21 ) + 2 RlC( ф 11 ' ( ф 11 + ф 21)сО ф 21 , (6)
где ф21 - угловая скорость массы m о ;
-
фХ1 - угловая скорость массы m ;
Таким образом, кинетическая энергия системы определяется по выражению:
T = 1( m o '1 R2 ф П + 1С( ф 11 + ф 21) 2 + 2 ^ф • ( ф 11 + ф 21 )с0 Ф 21 ) ] +
2 . (7)
+ m0 • 1 2 • ф ) 22 + m • R 2 • (ф 2 )
Откуда d T дф 11
= 0
-^- = m0R, j + mJ2,l + mJ2 ф21 + 2 mJcR(lt cos , 21+ mJcR(2 1 cos (p 2i + d( P ii
+ mR 2фп
d? (—) = moR ' Ф1 + molC Ф1 + mot Ф1 + 2 moWncos, 21 -dt ,n
- 2mJcRфx(ф2j sin(p 21 + mJcR(p2} cos, 21-mJcRф2,ф2} sin(p 21 + mR?ф.
d T д , 21
- m o l c RфС sin ( 21 - m o l C R Ф1 (Фи sin ( 21
d T d ^21
= m olC Ф11 + m olC ^21 + m olCR ^11cos , 21 + m olC 2^21
d-
(—)
=
m
o
l
C
Ф
11
+
2
m
o
l
C
Ф
21
+
m
o
l
C
RФп
cos
21
-
m
o
l
C
RФпФ
21
sin
21
dt (21
.
Определение обобщенных сил, соответствующих обобщенным координатам системы
. Для определения обобщенных сил
Q
φ11
и
Q
φ21
, соответствующих обобщенным координатам
φ
11
и
φ
21
, применим принцип возможных перемещений. Определим работу сил на перемещениях
δφ
11
и
δφ
21
координат
φ
11
и
φ
21
. На систему действуют задаваемые силы: вес подвижных частей технологического оборудования и груза, приведенные к концу стрелы (рис., точка D), вес неподвижных частей технологического оборудования и базовой машины, приведенные к оси вращения стрелы (О
1
), а также усилия на штоках гидроцилиндров подъема стрелы Р. К заданным силам относится также кориолисова сила инерции. Возникновение кориолисовой силы инерции объясняется тем, что переносное движение в рассматриваемом режиме является вращательным (вращение точки С относительно точки О), а при вращательном относительном движении стрелы с грузом возникает поступательное движение центра масс груза и подвижных частей технологического оборудования, приведенного к оси вращения захвата относительно оси передней балансирной каретки базовой машины. Составим сумму элементарных работ задаваемых сил для относительного движения стрелы с грузом на возможном перемещении
δφ
21
. В эту сумму входит работа веса груза и подвижных частей технологического оборудования, приведенного к концу стрелы, вес неподвижных частей технологического оборудования и базовой машины, приведенный к оси вращения стрелы, а также работа кориолисовой силы инерции.
Q,. = m • g • A, - P • l •
(p
21
o
О 3
1- (
2
l
2
-
2lc
cos(180
-
щ
2
lS
-
Щ
1
-
,
21
)
)2
0,5 Таким образом, кориолисова сила инерции масс элементов конструкции повышает нагруженность системы и при определении обобщенных сил, соответствующих обобщенным координатам, её необходимо учитывать. Скорость поступательного движения центра масс груза и подвижных частей технологического оборудования (рис.):
0
21
•
lc
• sin(
18
0
-
^
21
)
7
0
+
R
2 —
2
l(R
cos(180
—
0
2 i)
Кориолисова сила инерции:
P
. 0
21
•
l
c
•sin(180
—
0
21
)
pk
=
2
m
o 011 ----;---------------------
7
Iq
+
R
—
2
l^R
cos(180
—
0
, [)
Работа на перемещении
δφ
11
:
A
1
=
Q
0n
•
60
11
,
O
A f ' 01
Г
lc
'•
Sin(180
—
0
21)
Q0
11
=
mo ■ g
•
A
1
—
mo ■ g
•
(
A
3
—
A
1
)
+
2
mo ■ 0
11
•
I
2 2
•
r
. (15)
7
1
2
+
R
2 —
2
lcR
cos(180
—
0
2 J
Найденные выражения производных и правых частей (10), (15) подставим в уравнение Лагранжа и после преобразований, получим систему уравнений:
m
o
R
0
+
m
o
l
C
0
11
+
m
o
l
C
0
21
+
2
m
o
l
C
R
0
11
cos
0
21
—
—
2
molcR0xx02
j
sin
0
21 +
molcR02
j
cos
0
21 —
molcR02102
j
sin
0
21 +
+
mR
20ц
=
m
o
• g
•
A
1 —
m
o
■ g
•
(
A
з —
A
1
)
+
+ 2m
_ 0
21
•
l
c
'sin(180
—
0
21
)
т
+
2
m
o 0
11
r^-----~------------------------
r
7
1
2
+
R
2 —
2
lcR
cos(180
—
0
21)
m
o
l
C
011
+
2
m
o
l
C
021
+
m
o
l
CR011
cos
0
21
—
m
o
l
C
R0"?
21
sin
0
21
+
+
m
o
l
e
R
(Pi
1
sin
0
21
+
m
o
l
e
RPn0
21
sin
0
21
=
m
o
• g
•
A
3
—
—
P
•
l
•
2
l
2
1 — (--- —
2
lc
cos(180
—
0
—
0
—
0
21)
2
lS
0,5 ) Уравнение (16) описывает движение приведенных масс в системе «базовый трактор – технологическое оборудование – груз», решая которые, можно получить данные о динамических нагрузках, возникающих в элементах конструкции лесопогрузчиков с жесткой и жестко балансирной подвеской корпуса базовой машины в зависимости от конструктивных и эксплуатационных факторов.
Заключение.
Из уравнения (16) следует, что работа лесопогрузчика перекидного типа с изменяющимся центром вращения технологического оборудования и груза имеет отличительные особенности:
1. При перемещении технологического оборудования из положения набора в транспортное положение на первом этапе движении происходит вращение груза со стрелой относительно оси вращения стрелы при наклонном положении машины до достижения равенства удерживающего и опрокидывающего моментов от сил тяжести машины и груза.
2. После превышения величины момента от силы тяжести машины (удерживающего момента) величины момента от силы тяжести груза (опрокидывающего момента) происходит одновременное вращение груза относительно оси вращения стрелы и всей машины относительно оси балансира передней каретки до соударения задней каретки с опорной поверхностью.
3. Разработанная математическая модель одновременного перемещения груза вокруг оси вращения стрелы и вращения корпуса лесопогрузчика относительно оси передней балансирной каретки трактора позволяет проводить исследования нагруженности элементов конструкции лесопогрузчика с учетом ряда конструктивных и эксплуатационных факторов (угловой скорости стрелы и корпуса, величины массы груза, параметров кинематической и гидравлической схем и других), выполнять оптимизацию параметров кинематики технологического оборудования на стадии проектирования.
