Математический анализ различных вариантов наружного чрескостного остеосинтеза

Автор: Бейдик О.В., Ромакин А.Г., Левченко К.К., Цыплаков А.Ю., Афанасьев Д.В., Ромакина Н.А., Любицкий А.П.
Журнал: Гений ортопедии @geniy-ortopedii
Статья в выпуске: 3, 2002 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/142120552
IDR: 142120552
Текст статьи Математический анализ различных вариантов наружного чрескостного остеосинтеза
При лечении переломов и деформаций пяточной кости используются методики наружного чрескостного остеосинтеза спицевым аппаратом Г.А. Илизарова [3]. Как дополнение к известным спицевым компоновкам аппарата, нами были разработаны методики спице-стержневой и стержневой фиксации фрагментов костей. Методом математического моделирования была произведена сравнительная оценка жесткости систем, возможных перемещений и деформаций, а также рассчитаны напряжения, возникающие при взаимодействии элементов конструкций с костной тканью.
Цель работы состояла в сравнительном ана-
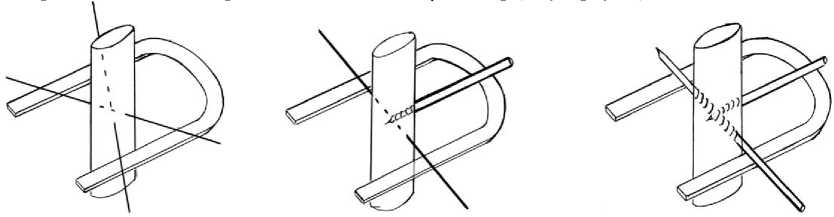
а) д вухспицевая конструкция
б) с пице - стержневая конструкция
в) д вухстержневая конструкция
Рис. 1. Схемы фиксации.
лизе различных способов фиксации костных фрагментов при переломах и деформациях пяточной кости (рассматривались методы наружного чрескостного остеосинтеза).
Рассматриваемые двухспицевая, спицестержневая и двухстержневая конструкции схематически изображены на рис. 1.
Основу этих конструкций составляет полу- кольцевая опора, к которой крепятся спицы и стержни. Спицы снабжены упорной площадкой. Используются стержни двух видов – консольные и сквозные. Стержни имеют две разновидности резьбы: метрическую (для крепления к опоре) и упорную (для соединения с костью).
Оценка напряжений, возникающих при взаимодействии элементов конструкций с костной тканью. Усилия, создаваемые в аппарате для коррекции положения отломков, передаются на кость при помощи упоров на спицах и резьбового соединения в стержнях (рис. 2).
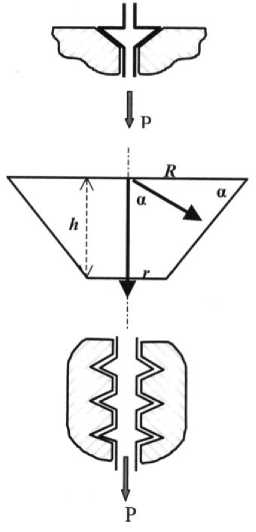
Рис. 2. Схемы упора на спице и резьбового соединения. P - сила натяжения.
Для определения максимально допустимой силы, необходимой для удержания отломка в фиксированном положении, важно оценить напряжения, возникающие при этом в костной ткани.
Площадь поверхности контакта упора на спице с костью может быть вычислена как пло- щадь поверхности усеченного конуса
S = П R + r ) L = П R + r )V h 2 + ( R — r )2 ■
При натяжении спицы силой P , напряжения, возникающие в костной ткани, приближенно равны (j = P cos a . Так как tg a = h , то
S R - r
1 R - r ■ cos a = — =----------
71 + tg2 a 7 h 2 + ( R - r )2
Поэтому o ______ ( R - r ) P ______= k p ,
n ( R + r )( h 2 + ( R - r )2) 1
где k. =
R - r
■
n ( R + r )( h 2 + ( R - r )2)
В частности, для применяемых на практике спиц имеем r=0,1 см, R ® 0,4 см, h ® 0,45 см, k » 2
2 см
При использовании стержня, имеющего с костью резьбовое соединение, напряжения, воз- никающие в костной ткани, ниже, чем при использовании спицы с упором. Это достигается за счет большей площади контакта резьбы стержня с костным фрагментом, что создает меньшее напряжение в кости. Если наружный диаметр резьбового соединения равен 2R, а внутренний - 2r, то на каждом витке резьбы площадь соприкосновения стержня с костной тканью можно приближенно вычислить как площадь кольца s1 = nR2-r2). Для принятых на практике значений 2R=0,65 см, 2r=0,45 см 51x0,173 см2. Площадь контактной поверхности s=ns1, где n - количество витков. Поэтому напряжение, возникающее в костной ткани при использовании резьбового соединения, тем меньше, чем больше число витков. В частности, для приведенных параметров спицы и стержня напряжение резьбового соединения будет заведомо меньше напряжения, создаваемого спицей с упором, при наличии не менее трех витков в контактной области для одинаковой силы натяжения. Следует отметить, что число витков не может быть большим, так как при этом уменьшается шаг резьбы и возникает опасность среза резьбы в костном фрагменте.
При оценке перемещений и деформаций в стержневых и спице-стержневых конструкциях использовались схемы расчета прогибов балок, основанные на гипотезе Бернулли [1]. При этом деформации спиц определялись по стандартной методике [2].
Деформации стержневых элементов конструкций оценивались с использованием модельных задач [1].
Рассматривались различные способы нагрузки балки: консольная балка, нагруженная моментом пары сил, приложенных к свободному концу (рис. 3 а); консольная балка, нагруженная моментом сосредоточенной силы, приложенной к свободному концу (рис. 3 б); свободно опертая по краям балка, нагруженная сосредоточенной силой, приложенной в середине (рис. 3 в).
Дифференциальное уравнение упругой линии балки (в данном случае оси симметрии) имеет вид (см., например, [1]):
у Ч х ) = 1- M ( х ), EI
где y ( x ) - величина смещения оси балки в точке с абсциссой x ;
E - модуль Юнга;
I - момент инерции поперечного сечения балки; для балки с круглым поперечным сечением диаметра d [ = ra i4/64 ;
M ( x ) - момент, создаваемый приложенной нагрузкой.

а) Консольная балка, нагруженная моментом пары сил, приложенных к свободному концу.
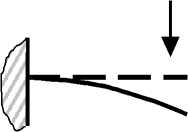
б) Консольная балка, нагруженная сосредоточенной силой, приложенной к свободному концу.
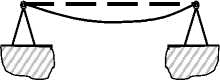
в) Свободно опертая по краям балка, нагруженная сосредоточенной силой, приложенной в середине.
Рис. 3. Модельные задачи.
В случае а) консольная балка нагружена моментом М0 , создаваемым парой сил. Значение M(x) постоянно во всех сечениях и равно М0,
начальные условия имеют вид y(0)=0, у'(0)=0 .
Дважды интегрируя (1), получим выражение для прогиба
, . 1
У ( x ) = M 0 x + C 1 x + C 2 ’
2 EI где Ci, C2 - постоянные интегрирования. Используя начальные условия (2), находим, что С1=С2=0.
Таким образом, в случае а) решение уравнения (1) с начальными условиями (2) имеет вид z . 1 2
у ( x ) = M о x .
2 EI
Максимальный прогиб и наибольший угол поворота поперечного сечения достигаются при x = L и вычисляются по формулам
у ( L) = M O LL , у ‘ ( L ) = ML .
2 EI EI
В случае б) обозначим P сосредоточенную силу, которой нагружена балка. Тогда выражение для момента M(x) в (1) имеет вид
M (x) = P (L - x), а начальные условия – (2). Решение в этом случае задается формулой у (x) = (3L - x).
6 EI
Так же, как и в предыдущем случае, максимальный прогиб и наибольший угол поворота поперечного сечения достигаются при x = L .
у (L) =----, у'(L) =.
3 EI2
Изгиб шарнирно опертой по краям нагруженной сосредоточенной силой P ,
балки, прило-
женной в центре (рис. 3 в). Обозначим длину балки 2L . Выражение для изгибающего момента
М ( x ) имеет вид
M ( x ) = -
P
- —x при 0 < x < L
P
- —(2 L - x ) при L < x < 2 L
Начальные условия - у (0)=0, y ( 2L )=0.
В силу симметрии задачи ясно, что наибольшие прогибы будут в центре, в точке приложения силы, а угол поворота поперечного сечения в этой же точке отсутствует ( y ( L )=0). Поэтому решение для всей балки мы можем
получить как симметричное продолжение относительно прямой x=L решения задачи на интервале [ 0; L ] для м ( x ) = - P x с начальными усло
виями у (0) = 0, y ( L )=0. Решение имеет вид
( x ) = P ( 3 Lx - x з) . Максимальный прогиб у 1 ) 12 ei\ )
лучаем при x=L
PL 3 у ( L ) =
6 EI
по-
Результаты расчетов показывают, что при действии одинаковых сил прогибы двухспицевой конструкции ® в 2-2,5 раза больше, чем прогибы спице-стержневой, которые, в свою
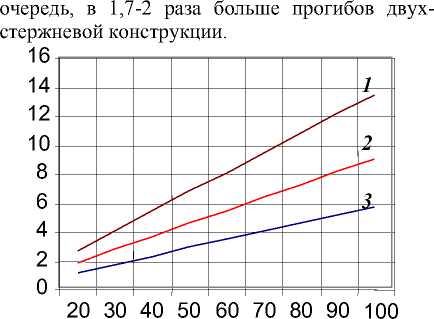
Рис. 4. Максимальные прогибы для консольной балки (рис. 3, б) при различных L: 1 – L= 6см, 2 – L=7см, 3 – L= 8см. По оси абсцисс отложена нагрузка P.
ВЫВОДЫ
Из трех рассмотренных конструкций максимальная жесткость фиксации достигается при использовании стержневых конструкций.
Большая площадь контакта резьбы стержня с костным фрагментом создает меньшее напряжение в кости, уменьшая вероятность ее разру-
шения. При использовании спицевых конструкций существует большая опасность прорезывания костной ткани, что приводит к увеличению зазоров между костью и спицей, снижающих жесткость фиксации.
