Математическое и имитационное моделирование электропривода с преобразователем частоты нефтегазового оборудования

Автор: Козярук Анатолий Евтихиевич, Васильев Богдан Юрьевич, Яценко Юрий Олегович, Ивановский Александр Игоревич
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 1 т.18, 2018 года.
Бесплатный доступ
В настоящее время одной из главных задач современной энергетики является задача освоения шельфовых месторождений углеводородов. Для освоения месторождений углеводородов используются технические средства, состоящие из плавучих буровых установок (ПБУ) и буровых судов, ледоколов, судов снабжения, транспортных судов (танкеров и газовозов), подводных перекачивающих комплексов (ППК). Для разработки высоковольтных электроприводов с преобразователями частоты технических средств освоения шельфа выполняется комплекс исследований с использованием математических и имитационных моделей, причем точность расчета и характеристики конечного изделия определяются качеством выполнения моделирования. Достижение высоких показателей адекватности моделирования и точности расчета возможно обеспечить только с использованием уточненных математических моделей. С ростом объемов работ по проектированию электротехнических комплексов нефтегазовых технологических систем растет актуальность математического и имитационного моделирования электроприводов и исследования их характеристик методом компьютерного моделирования. В работе показан алгоритм составления имитационных моделей трехуровневых автономных инверторов электроприводов, который включает в себя анализ структурной схемы электропривода, принятие допущений, составление эквивалентной схемы электропривода, математического описания электропривода, синтеза алгоритма модуляции и составления имитационных моделей. Выполненные исследования показывают влияние параметров сопротивления и индуктивности моторных дросселей на качество выходного напряжения автономного инвертора. Также исследовано влияние частоты коммутации автономного инвертора на искажения выходного напряжения и тока. Дополнительно даны рекомендации по выбору моторных дросселей.
Электропривод, преобразователь частоты, трехуровневый автономный инвертор, математическая модель, имитационная модель
Короткий адрес: https://sciup.org/147232662
IDR: 147232662 | УДК: 621.31 | DOI: 10.14529/power180115
Mathematical and imitation modelling of bearing currents driving machines in oil & gas equipment semiconductor transformer drives
Developing offshore hydrocarbon fields is nowadays a primary objective of power engineering. To develop hydrocarbon fields, one uses floating drilling rigs and drilling vessels, icebreakers, supply vessels, transport vessels (tankers and gas carriers), and submarine pumping complexes. When designing high-voltage electric drives with frequency converters, multiple interrelated studies are carried out using mathematical and simulation models, whereby calculation accuracy and the properties of the final product depend on the quality of such simulation. Refined mathematical models are a must if modeling and calculations are to be sufficiently accurate. Mathematical and simulation modeling of electric drives, as well as computational analysis thereof are becoming ever more relevant as engineers have to design more and more power facilities for oil-and-gas fields. We herein demonstrate an algorithm for simulation modeling of stand-alone three-level electric drive inverters, which includes analysis of such drive’s structural diagram, assumption-making, generating an equivalent electric drive diagram, describing the drive mathematically, synthesizing a modulation algorithm, and compiling simulation models. Our studies have shown the effect that resistance parameters and the inductance of motor chokes have on the output voltage quality of a stand-alone inverter. We have also studied how switching frequency of a stand-alone inverter affects distortions in the output voltage and current. We additionally give recommendations on how to select motor chokes.
Текст научной статьи Математическое и имитационное моделирование электропривода с преобразователем частоты нефтегазового оборудования
В настоящее время актуальной задачей современной энергетики является задача освоения шельфовых месторождений углеводородов. Это обусловлено следующими факторами:
-
- крупнейшими запасами углеводородов шельфовых месторождений;
-
- санкционными ограничениями на нефтедобывающие технологии;
-
- истощением наземных месторождений;
-
- отсутствием соизмеримых энергетических альтернатив.
Для освоения месторождений углеводородов используется комплекс технических средств, состоящий из плавучих буровых установок (ПБУ) и буровых судов, ледоколов, судов снабжения, транспортных судов (танкеров и газовозов), подводных перекачивающих комплексов (ППК).
Использование традиционных технических средств освоения и транспортировки добытого полезного ископаемого не достигает тех показателей ресурсо- и энергоэффективности, которые показывают современные электромеханические ком- плексы освоения и транспортировки углеводородов. Применение современных технических решений обеспечит: высокую надежность; требуемые технико-эксплуатационные и энерго-экологические характеристики; снижение эксплуатационных затрат наряду со значительным увеличением объема добываемого сырья; повышение промышленной безопасности шельфовых месторождений.
В качестве движителей главных технологических и исполнительных механизмов используются высоковольтные электроприводы большой мощности, которые строятся на основе асинхронных двигателей с преобразователями частоты. Для изготовления конкурентоспособных электроприводов нефтегазового оборудования на всех стадиях разработки необходимо выполнять математическое и имитационное моделирование всех процессов преобразования энергии и законов управления. На этапе моделирования электропривода решаются следующие задачи [1, 2]:
-
- исследование характеристик и режимов работы электропривода;
-
- синтез алгоритмов управления электропривода;
-
- определение токов и напряжений на разных участках электропривода;
-
- выбор оборудования электропривода;
-
- оценка совместимости элементов электропривода и др.
Для выполнения всех требований, предъявляемых к электроприводам нефтегазового оборудования, необходимо использование уточненного математического и имитационного моделирования высокой сложности. Разработке и использованию математических и имитационных моделей асинхронного электропривода с преобразователем частоты посвящена настоящая статья.
Эквивалентная схемавысоковольтного электропривода
В высоковольтных электроприводах большой мощности для электроснабжения и управления приводными двигателями переменного тока используются двухзвенные преобразователи частоты, состоящие из 12-пульсного выпрямителя и трехуровневого автономного инвертора (ТАИ).
Повышение единичной мощности преобразователя частоты достигается за счет увеличения пульсности выпрямителя и уровней выходного напряжения автономного инвертора. Повышение пульсности выпрямителя осуществляется путем увеличения количества последовательно или параллельно включенных диодных мостов. Повышение уровней выходного напряжения автономного инвертора осуществляется путем увеличения количества последовательно включен- ных транзисторов (тиристоров) в каждом его плече [2–7]. Общая схема электропривода с преобразователем частоты представлена на рис. 1 (СЭС – сеть электроснабжения, Тр – трансформатор, СФ – сглаживающий фильтр, ТУ – тормозное устройство, АД – асинхронный двигатель).
Синтез модуляционной системы управления и системы управления электроприводом целесообразно осуществлять в системе «Инвертор – Двигатель» с заменой сети электроснабжения, трансформатора и блока выпрямителя на источник постоянного напряжения( U dc ). Тормозное устройство при составлении схемы замещения и имитационной модели не учитывается.
При составлении математической модели системы «Инвертор – Двигатель» принимались следующие допущения [8–14]:
-
- сеть электроснабжения, трансформатор и выпрямитель были представлены эквивалентным источником постоянного напряжения;
-
- полупроводниковые приборы являются идеальными ключами;
-
- состояние ключей полностью описывалось коммутационной функцией;
-
- приводной электродвигатель заменлся эквивалентной нагрузкой.
С учетом этих допущений была составлена эквивалентная схема электропривода, которая использовалась для математического описания.
Схема замещения представлена на рис. 2. В схеме учтены активные сопротивления дросселей и конденсаторов сглаживающего фильтра и моторных дросселей. Асинхронный двигатель на схеме представлен RL – нагрузкой. Напряже-
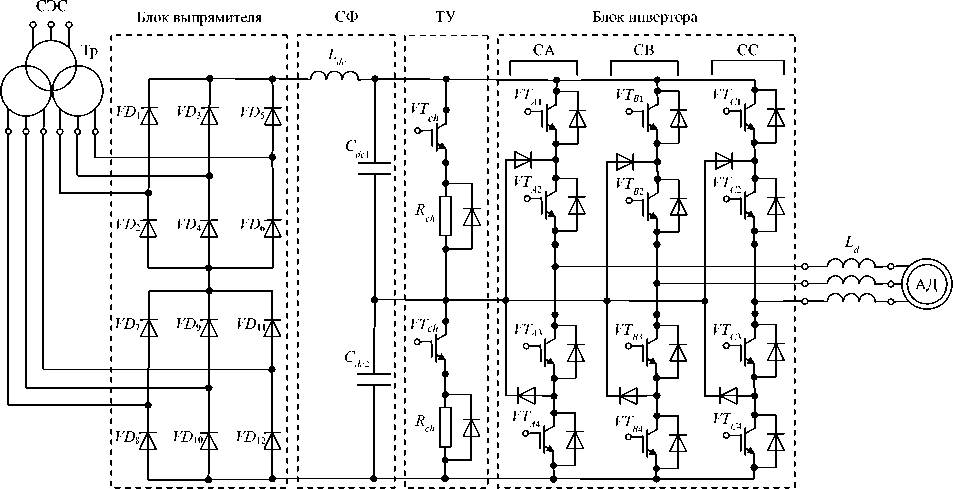
Рис. 1. Схема электропривода с высоковольтным преобразователем частоты
Электромеханические системы
Моторные
Сглаживающий фильтр Блок инвертора дроссели Нагрузка
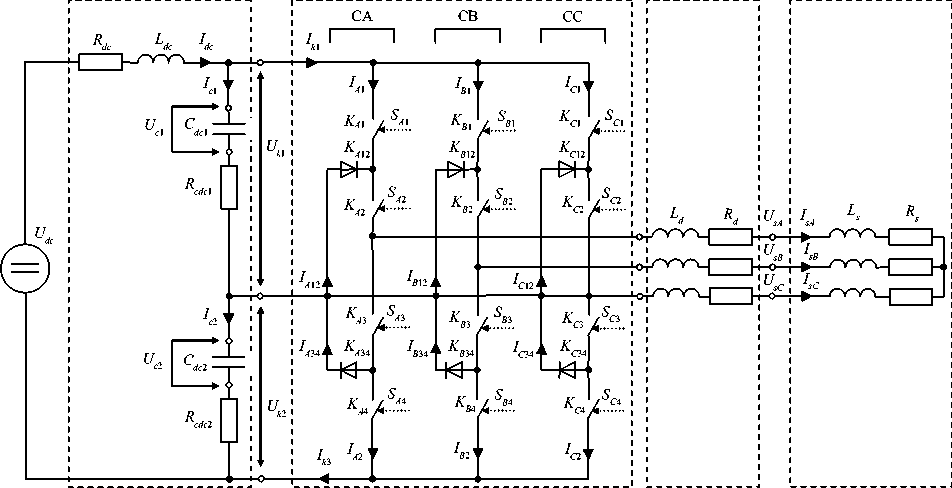
Рис. 2. Схема замещения системы трехуровневого автономного инвертора высоковольтного электропривода
ние источника соответствует напряжению, которое образуется на выходе 12-пульсного выпрямителя, подключенного к источнику напряжения 3000 В.
С помощью эквивалентной системы «Инвертор – Двигатель» можно выполнять следующий комплекс исследований имитационных моделей:
-
- анализ режимов работы автономного инвертора;
-
- синтез алгоритмов модуляционной системы управления;
-
- анализ качества выходного напряжения автономного инвертора при использовании различных алгоритмов управления;
-
- анализ влияния моторных дросселей на качество напряжения обмоток статора приводного электродвигателя;
-
- анализ качества напряжения и тока сглаживающего фильтра;
-
- анализ влияния параметров сглаживающего фильтра на режим работы автономного инвертора.
Для выполнения данных исследований необходимо составить математическое описание и построить имитационную модель системы «Инвертор – Двигатель».
Математическое описаниетрехуровневого автономного инвертора
Комплементарные пары ключей трехуровневого автономного инвертора образуются следующим образом:
S a 1 = 1 - S a з ;
S A 2 = 1 - S A 4 ;
S B 1 = 1 - S B 3 ;
S B 2 = 1 - S B 4 ;
S C 1 = 1 - S C 3 ;
SC 2 = 1 SC 4, где SA1 , SA2 , SA3 , SA4 , SB1 , SB2 , SB3 , SB4 , SC1 , SC2 , SC3 , SC4 – коммутационные функции транзисторов, формируемые модуляционной системой управления.
Напряжение стоек трехуровневого автономного инвертора образуется следующим образом:
U A = U k 1 S A 1 S A 2 - U k 2 S A 3 S A 4 ;
U B = U k 1 S B1 S B 2 - U k 2 S B 3 S B 4 (2)
UC = Uk 1 SC 1 SC 2 - Uk 2 SC 3 SC 4, где Uk1 , Uk2 – напряжения конденсаторов сглаживающего фильтра.
Фазное напряжение на выходе трехуровнево- го автономного инвертора рассчитывается следующим образом:
|
U iA |
= + 2 Sa 3 A |
- 1 Sb 3 B |
- 1 So 3 C |
|
U iB |
= - 1 Sa 3 A |
+ 2 Sb 3 B |
- 1 Sc 3 C |
|
UiC |
= - 1 Sa 3 A |
- 1 Sb 3 B |
+ 2 Sc 3 C |
Напряжения на выходных контактах моторных дросселей (на обмотках статора приводного электродвигателя) определяются путем интегрирования дифференциальных уравнений:
dU sA dt
dUsB dt
dUsC dt
= T d " ( U A — U sA ) ;
Rd
= dR~ ( U B — U sB ) ;
Rd
= Ld- ( uc — U s C ) ,
Rd
где Rd и Ld – активные сопротивления и индуктивности моторных дросселей.
Ток нагрузки схемы замещения автономного инвертора определяется следующим образом:
dIsC dt
dIsA dt dIsB dt
|
U sA |
— R s I sA . |
|
U sB |
L s ; — R s I sB |
|
U sC |
L s — R s I sC |
;
;
L s
,
где Rs и Ls – активные сопротивления и индуктивности моторных дросселей нагрузки автономного инвертора.
Токи ключей трехуровневого автономного инвертора определяются следующим образом:
I kA 1 = I A S A 1 , если I a > 0 ^ I kA 2 если I a < 0 ^ I kA 2 I kA 4 = — I A S A 4 ;
= I A S A 2 I kA 3 = I A S A 3 S A 4 ,
= I A S A 1 S A 2 I kA 3 = — I A S A 3 ,
Ток источника напряжения определяется путем интегрирования дифференциального уравнения:
dl dc = Ud c dt
—
Uk 1
—
Uk 2
Ldc
—
R dc I dc
.
Токи конденсаторов сглаживающего фильтра определяются следующим образом:
I c 1 = I dc
I c 2 = I dc
—
—
I k 1 ;
I k 2 .
Напряжения на конденсаторах сглаживающего фильтра определяются путем интегрирования дифференциальных уравнений:
dU c 1 I c 1
dtC dUc2
-------=.
dtC
.
Напряжения на входе блока инвертора (на выходе сглаживающего фильтра) определяются следующим образом:
U k 1 = U c 1 + R cdc 1 I c 1 ;
U k 2 = U c 2 + R cdc 2 I c 2 .
Уравнения (1)–(12) представляют собой математическую модель схемы замещения электропривода, состоящей из источника постоянного напряжения, сглаживающего фильтра, трехуровневого автономного инвертора, моторных дросселей и активно-индуктивной нагрузки.
Управляющие сигналы нормируются и имеют амплитуду
I kB 1 = I B S B 1 , если I B > 0 ^ IkB 2 если I B < 0 ^ IkB 2 I kB 4 = — I B S B 4 ;
U sa = Us b = Us c = Us = [ — 1;1 ] .
= I B S B 2 I kB 3 = I B S B 3 S B 4 , (6)
= I B S B 1 S B 2 I kB 3 = — I B S B 3 ,
Для реализации алгоритма широтно-импульсной модуляции используется два несущих сигнала, амплитуда которых изменяется в следующих пределах:
IkC 1 = I CSC 1, если IC > 0 ^ IkC2 = ICSC2 IkC3 = — ICSC3 SC4, если Ic < 0 ^ IkC2 = ICSC 1 SC2 IkC3 = — ICSC3, IkC 4 = — ICSC 4.
Токи разделительных диодов определяются
u Set i = [ 0;1 ] ;
U set 2 = [ — 1;0 ] .
Закон формирования несущих сигналов треугольной формы имеет следующий вид:
|
следующим образом: |
||
|
I A 12 |
= I kA 2 |
I kA 1; |
|
I A 34 |
= I kA 4 |
— I kA 3 ; |
|
I B 12 |
= I kB 2 |
— I kB 1 ; |
|
I B 34 |
= I kB 4 |
— I kB 3 ; |
|
I C 12 |
= I kC 2 |
— I kC 1: |
|
I C 34 |
= I kC 4 |
— I kC 3 |
;
;
.
Uset 1 = П arcsin [ sin ( 2 n f set t ) ] + 0, 5;
Uset 2 = П arcsin [ si n ( 2 n f sett1 ) ] — 0,5.
Токи во входных линиях блока инвертора ределяются следующим образом:
I k 1 = I kA 1 + I kB1 + I kC 1 ;
I k 3 = I kA 2 + I kB 2 + I kC 2 •
Закон управления состоянием транзисторов трехуровневого автономного инвертора имеет сле-
|
(7) |
дующий вид: |
^ S a 1 = 1, S a 3 = 0 : ^ S a 1 = 0, S a 3 = 1; |
|
|
Us * A Us * A |
> Uset 1 < Uset 1 |
||
|
оп- |
U s * A |
> Uset 2 |
^ S a 2 = 1, S a 4 = 0 |
|
Us * A |
< Uset 2 |
^ S a 2 = 0, S a 4 = 1 |
|
;
.
Аналогичным образом строится закон управления для строек транзисторов фазы B и C.
;
Электромеханические системы
Уравнения (13)–(16) представляют собой алгоритм широтно-импульсной модуляции.
Имитационная модель трехуровневого автономного инвертора высоковольтного электропривода
Построение имитационной модели системы трехуровневого автономного инвертора высоковольтного электропривода осуществляется на основе уравнений (1)–(16). Имитационная модель системы трехуровневого автономного инвертора высоковольтного электропривода представлена на рис. 3.
Имитационная модель трехуровневого автономного инвертора высоковольтного электропривода включает в себя следующие подсистемы:
-
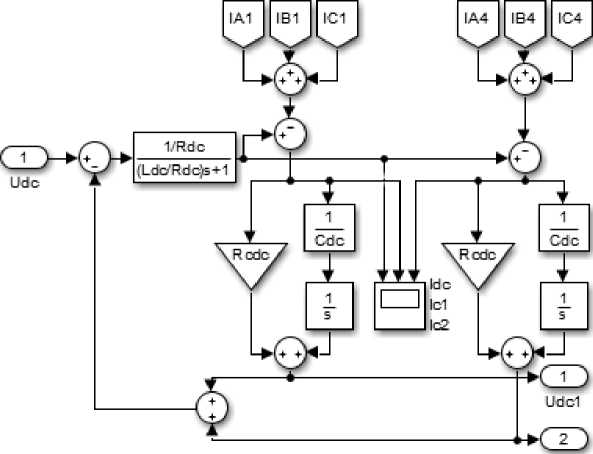
- модель сглаживающего фильтра (СФ) – рис. 4;
-
- модель полупроводникового блока инвертора (ТАИ) – рис. 5;
-
- токовые модели стоек инвертора – рис. 6;
-
- алгоритм широтно-импульсной модуляции (ШИМ) – рис. 7.
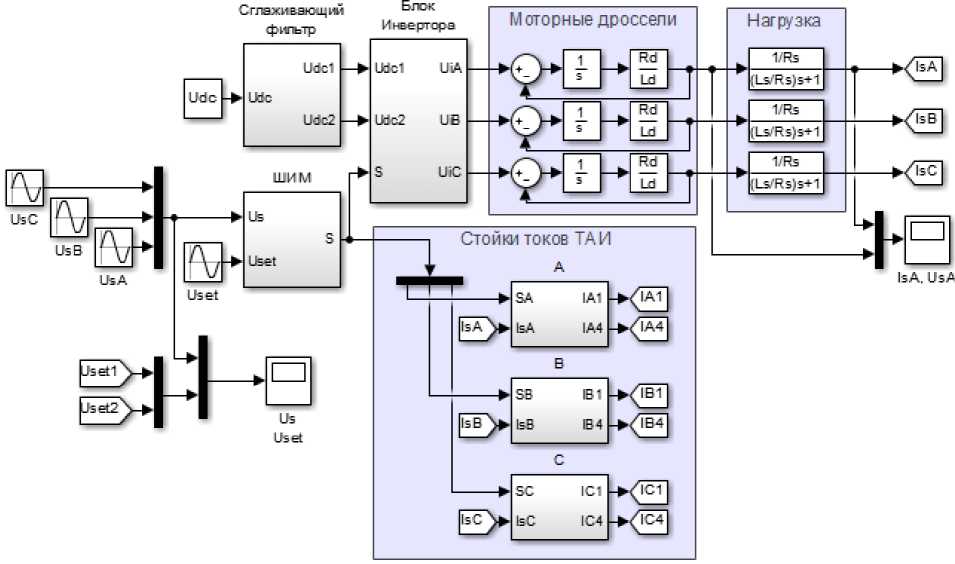
Рис. 3. Имитационная модель трехуровневого автономного инвертора высоковольтного электропривода
Udc2
Рис. 4. Модель сглаживающего фильтра
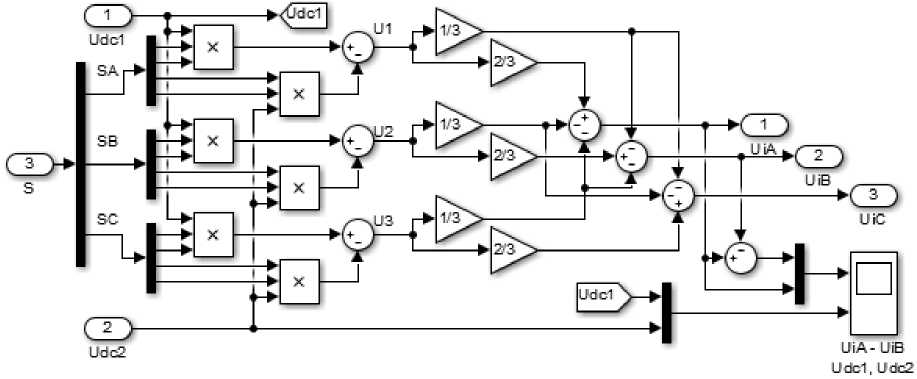
Рис. 5. Модель полупроводникового блока инвертора
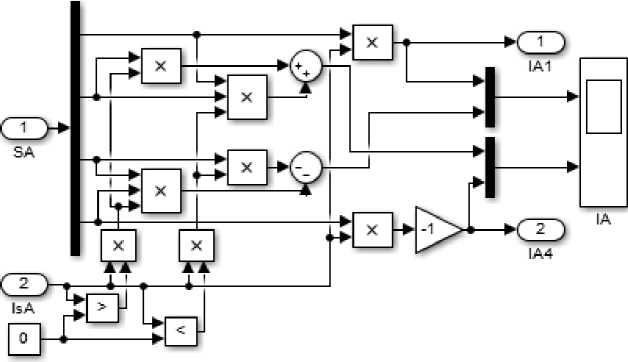
Рис. 6. Токовая модель стоек инвертора
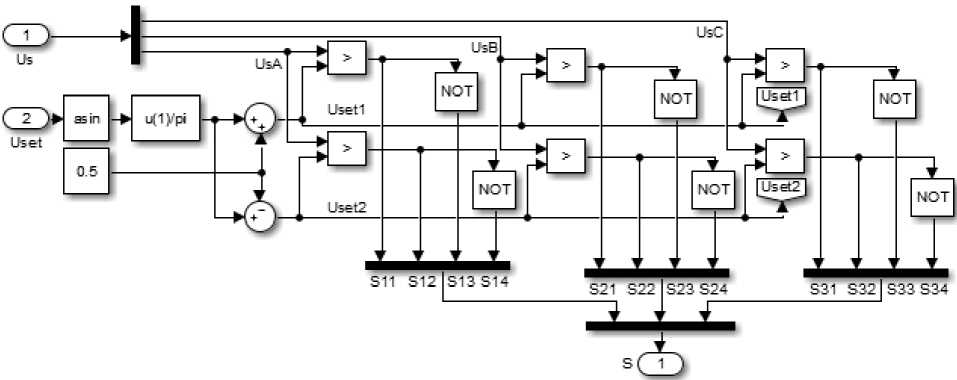
Рис. 7. Алгоритм широтно-импульсной модуляции трехуровневого инвертора
Представленные имитационные модели, построенные на основе уравнений (1)–(16) математического описания схемы замещения электропривода с алгоритмом широтно-импульсной модуляции, с достаточной точностью отражают все протекающие в реальном электроприводе физические процессы.
Электромеханические системы
Исследование характеристик трехуровневого автономного инвертора высоковольтного электропривода
И м итаци он ное мод е л иров ание в ы полня л ос ь при сл ед у ющ и х з на чен ия х па ра м е тров эл е м е н тов электропривода:
Список литературы Математическое и имитационное моделирование электропривода с преобразователем частоты нефтегазового оборудования
- Белов, М.П. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов: учеб. для высш. учеб. заведений / М.П. Белов, А.Д. Новиков, Л.Н. Рассудов. - М.: Академия, 2007. - 576 с.
- Автоматизированный электропривод промышленных установок / Г.Б. Онищенко, М.И. Аксенов, В.П. Грехов и др. - М.: РАСХН, 2001. - 520 с.
- Терехов, В.М. Системы управления электроприводов: учеб. для вузов / В.М. Терехов, О.И. Осипов. - М.: Академия, 2005. - 304 с.
- Соколовский, Г.Г. Электроприводы переменного тока с частотным регулированием: учеб. для вузов / Г.Г. Соколовский. - М.: Академия, 2006. - 272 с.
- Tripathi, A. Direct method of overmodulation with integrated closed loop stator flux vector control / A. Tripathi, A.M. Kambadkone, S.K. Panda // IEEE Trans. PE. - 2005. - No. 20. - P. 1161-1168. DOI: 10.1109/TPEL.2005.854049
- Белов, М.П. Инжиниринг электроприводов и систем автоматизации: учеб. пособие / М.П. Белов, О.И. Зементов, А.Е. Козярук. - М.: Академия, 2006. - 368 с.
- Шрейнер, Р.Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты / Р.Т. Шрейнер. - Екатеринбург: УРО РАН, 2000. - 654 с.
- Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления / Р.Т. Шрейнер, А.В. Костылев, В.К. Кривовяз, С.И. Шилин. - Екатеринбург: Рос. гос. проф.-пед. ун-т, 2008. - 361 с.
- Герман-Галкин, С.Г. Matlab&Simulink. Проектирование мехатронных систем на ПК / С.Г. Герман-Галкин. - СПб.: КОРОНА-Век, 2008. - 368 с.
- Пронин, М.В. Силовые полностью управляемые полупроводниковые преобразователи (моделирование и расчет) / М.В. Пронин, А.Г. Воронцов / под ред. Е.А. Крутякова. - Санкт-Петербург, 2003. -172 с.
- Hendawi, E. Analysis, simulation and implementation of space vector pulse width modulation inverter / E. Hendawi, F. Khater, A. Shaltout // International conference on application of electrical engineering. - 2011. - P. 124-131.
- Ogbuka, C.U. A Generalized Rectified Sinusoidal PWM technique for harmonic elimination / C.U. Ogbuka, M.U. Agu // The pacific journal of science and technology. - 2009. - No. 2. - Р. 21-26.
- Козярук, А.Е. Прямое управление моментом в электроприводе переменного тока машин и механизмов горного производства: учеб. пособие / А.Е. Козярук, В.В. Рудаков. - СПб., 2008. - 99 с.
- Gupta, A.K. A general space vector PWM algorithm for multi-level inverter, including operation in overmodulation range / A.K. Gupta, A.M. Kambadkone // International electric machines and drives conference. - 2005. - P. 2527-2533.
- DOI: 10.1109/IEMDC.2005.195910
