Математическое моделирование автономного мобильного робота с тремя всенаправленными колесами

Автор: Березина В.А., Шестаков Д.А., Струкова В.Г.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 6 (70), 2022 года.
Бесплатный доступ
В данной статье представлена разработка кинематической модели и ее реализация с использованием нескольких инструментов. Результатом является модель, которая повторяет кинематику трёхколесного робота, оснащенного всенаправленными колёсами, которая затем тестируется с использованием 3D-модели, импортированной из Blender и Matlab для моделирования.
Мобильные роботы, робототехника, кинематика, моделирование и симуляция
Короткий адрес: https://sciup.org/140294624
IDR: 140294624 | УДК: 004.8
Mathematical modeling of an autonomous mobile robot with three omnidirectional wheels
This article presents the development of a kinematic model and its implementation using several tools. The result is a model that replicates the kinematics of a three-wheeled robot equipped with omnidirectional wheels, which is then tested using a 3D model imported from Blender and Matlab for simulation.
Текст научной статьи Математическое моделирование автономного мобильного робота с тремя всенаправленными колесами
Мобильные роботы обладают гораздо большей гибкостью и подвижностью, чем манипуляторы, что приводит к необходимости более сложных моделей. С точки зрения кинематики, основное различие между манипулятором и мобильным роботом заключается в характере и расположении его суставов [1]. Робот-манипулятор обычно моделируется как открытая кинематическая цепь, состоящая из чередования твердых тел с соединительными элементами одной степени свободы. В то время как кинематическая структура мобильного робота может рассматриваться как набор замкнутых кинематических цепей, таких как колесо, контактирующих с землей. Кроме того, взаимодействие колеса с землей определяется с кинематической точки зрения как плоское соединение с тремя степенями свободы, где одна из них, обычно неконтролируемая, представляет собой поперечное проскальзывание [2]. Эти два факта затрудняют построение модели.
Робот имеет несколько колёс с тремя степенями свободы (DoF) на каждом, что дает ему возможность маневрировать. В частности, у этого робота три колеса, каждое из которых имеет три степени резкости, и все они двунаправленные. На рисунке 1 отображена схема трехколесного робота.
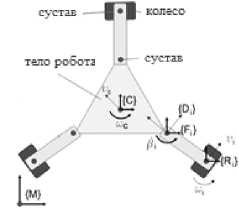
Рисунок 1 – Схема трехколесного робота
Система координат пола {M} фиксирована относительно поверхности и представляет собой систему координат для движения робота. Соответствующее глобальное положение робота представлено символом {C}, которое связано с телом робота; {Fi} – это i-й сустав ноги, прикрепленный к корпусу робота. λi описывает вектор положения робота. {Di} относится к компоненту направленности i-го колеса. Направленный угол обозначен βi. {Ri} представляет системы, расположенные в точке контакта с полом i-го колеса.
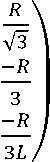
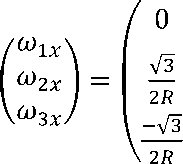
На основании уравнений линейной и угловой скоростей робота [1] и параметров всенаправленных колес [3], матрица Якоби будет выглядеть так:

2R
—
\ 3L
R
V3
—R
—R
3L
( ^ 1%\
• (^ 2% )
\ ^3%/
Якобиан обратного отображения (1) робота можно выразить следующим
образом:
R
— 1
2R
— 1
2R
—L
R
—L
R
—L
R

В качестве среды моделирования выбрана CoppeliaSim, в которую была перенесена Simulink-модель и 3D-модель робота и окружения, созданная в Blender. Исследуемая модель представляет собой голономную систему, допускающую всенаправленное движение и, следовательно, любую комбинацию угловой и линейной скоростей. Это позволяет роботу совершать любые движения по плоской поверхности.
На рисунках 2 и 3 представлены результаты, полученные при попытке осуществить моделью линейное и вращательное движения. Линейный тип
движения определяется линейной скоростью, описываемой компонентами v cx и
vcy. Эти компоненты должны быть постоянными, чтобы робот двигался
линейно, а угловая скорость θ c была равна нулю.

Рисунок 2 – Линейное движение робота
В случае вращательного движения робот вращается вокруг своей оси.
Компоненты v cx и v cy равны нулю, в то время как θ c остается постоянным.
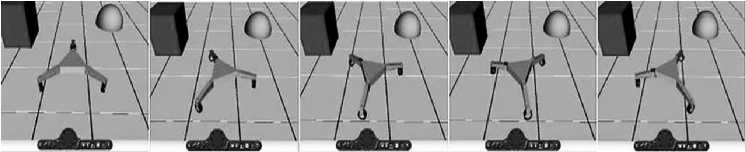
Рисунок 3 – Вращательное движение робота
Как видно на рисунках выше, робот может двигаться по любому пути в зависимости от скорости, изменяя которую, направление робота может меняться, заставляя двигаться к любой точке на плоскости.
На рисунке 4 представлен график, на котором отмечено желаемое движение робота (кривая) и фактическое движение робота (траектория движения робота).
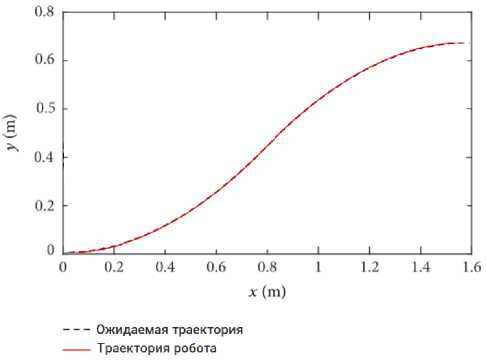
Рисунок 4 – Траектория движения робота по простой кривой
Как можно заметить из рисунка 4, траектория движения по простой кривой полностью совпадает с ожидаемой траекторией движения.
В данной статье был представлен расчет кинематическая модель трёхколёсного мобильного робота, оснащённого всенаправленными колёсами. Показаны прямая и обратная модели, необходимые для вычисления положения на основе скорости колес и скоростей, необходимых для достижения определенного положения соответственно. Была собрана модель, чтобы продемонстрировать
полную функциональность
кинематического
моделирования для робота, в которой представленные результаты очень удовлетворительны. Были выполнены два основных движения (линейное и вращательное), а также реализовано криволинейное движение.
Список литературы Математическое моделирование автономного мобильного робота с тремя всенаправленными колесами
- Xiang, L., Xunbo, L., & Liang, C. (2017, December). Multi-disciplinary modeling and collaborative simulation of multi-robot systems based on HLA. In Robotics and Biomimetics, 2007. ROBIO 2007. IEEE International Conference on (pp. 553-558). IEEE.
- M. Samadi and M. F. Othman. Global path planning for autonomous mobile robot using genetic algorithm. in Proceedings of the 2013 9th International Conference on Signal-Image Technology and Internet-Based Systems, SITIS 2013, pp. 726-730, Kyoto, Japan, December 2013.
- Jae-Bok Song, & Kyoung-Seok Byun. (2018). Design and Control of an Omnidirectional Mobile Robot with Steerable Omnidirectional Wheels. Korea University, Mokpo National University. Republic of Korea. P223.
