Математическое моделирование динамического поведения дизельгенераторной установки с двухкаскадной системой амортизации

Автор: Ковалв Виталий Витальевич, Вербилов Алексей Федорович, Ульрих Сергей Александрович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 1 т.22, 2020 года.
Бесплатный доступ
В работе рассмотрено математическое моделирование динамического поведения дизельгенераторной установки (ДГУ) с двухкаскадной системой подвески, включающей резиновые амортизационные опоры. Конструкция ДГУ моделируется в виде двухмассовой механической системы с упругими связями. Получены уравнения динамики в виде системы дифференциальных уравнений. Разработан алгоритм расчета динамических перемещений агрегата и рамы, а также программный комплекс, реализующий данный алгоритм. Представлены результаты численного исследования существующей конструкции ДГУ.
Дизель-генераторные установки, резинометаллические амортизаторы, вибрация, математическое моделирование, численные методы исследования
Короткий адрес: https://sciup.org/148312625
IDR: 148312625 | УДК: 004.942
Mathematical modeling of the dynamic behavior of a diesel generator unit with a two-stage depreciation system
The paper considers mathematical modeling of the dynamic behavior of a diesel generator unit with a two-cascade suspension system, including rubber shock-absorbers. The results of a numerical study of the existing unit design based on the developed algorithm are presented.
Текст научной статьи Математическое моделирование динамического поведения дизельгенераторной установки с двухкаскадной системой амортизации
Работа дизельгенераторной установки (ДГУ) сопровождается широким спектром колебательных процессов, различных по амплитудным и частотным параметрам. Это предопределяет высокий уровень динамических напряжений, возникающих в элементах конструкции ДГУ, и влияет на их прочность, надежность и долговечность. Современные конструкции ДГУ имеют узлы (резинометаллические амортизаторы), обладающие конечными значениями жесткости и массы. В результате приложения внутренних нагрузок при эксплуатации ДГУ будут возникать конечные деформации упругих элементов, что при определенных условиях приведет к вибрациям с большими амплитудами или к потере устойчивости процессов динамического деформирования.
В процессе проектирования амортизирующего крепления большое значение имеет выбор параметров и оптимальной схемы расположения амортизаторов. При большом разнообразии схем размещения амортизаторов следует предпочесть такую, при которой центр тяжести амортизируемого агрегата совпадает с центром жесткости амортизирующего крепления [1]. Такая схема обеспечивает меньшую ширину спектра частот свободных колебаний и большая устойчивость амортизируемого агрегата. Однако из условий компоновки расположения опор
агрегата центр жесткости упругого основания не всегда совпадает с центром тяжести амортизируемого агрегата, но находится на одной вертикали с ним. И чем меньше будет расстояние между этими центрами, тем лучше. При таком положении центра жесткости и центра тяжести агрегата частоты поступательных и поворотных колебаний относительно горизонтальных осей будут попарно связаны, т.е. будут представлять собой двухсвязные колебания, а частоты вертикальных поступательных и поворотных относительно вертикальной оси колебаний будут независимыми. Сближение центров жесткости амортизирующего крепления с центром тяжести агрегата способствует увеличению устойчивости механизма и малому разбросу частот свободных колебаний.
По этой причине желательно возможно большее снижение частот свободных колебаний амортизированного механизма. Однако с уменьшением частоты свободных колебаний уменьшается жесткость амортизаторов, что приводит к снижению допускаемой статической нагрузки на амортизатор и увеличивает амплитуду колебаний амортизированного механизма. Поэтому в случае невозможности подбора необходимого количества и расположения амортизаторов для улучшения вибрационной защиты применяют двухкаскадные системы амортизации (Рис. 1).
При проектировании подвески ДГУ, т.е. при выборе жесткостных характеристик резинометаллических амортизаторов, а так же при расчете их количества и точек установки, наиболее важным является этап прогнозирования динамических перемещений, вибраций с большими амплитудами или к потере устойчивости процессов динамического деформирования. Особую важность принимают эти вопросы при решении задач структурной и параметрической оптими-
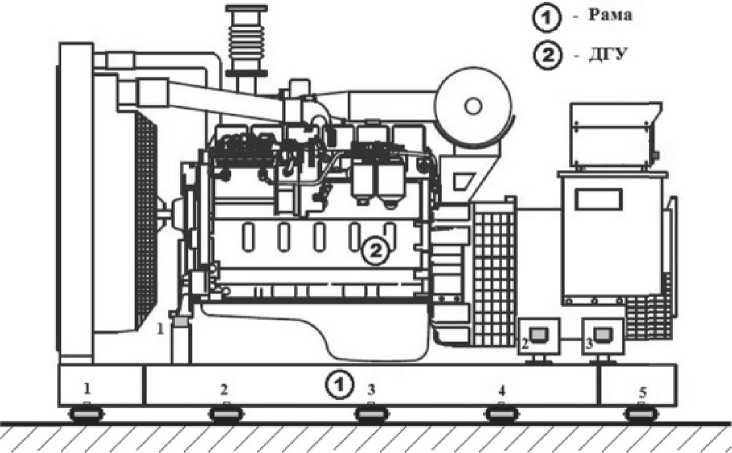
Рис. 1. Дизельгенераторная установка с двухкаскадной системой амортизации
зации конструкций амортизационного крепления ДГУ с целью снижения динамических перемещений, а также уровня излучаемого шума.
При исследовании колебательных процессов ДГУ как механической системы необходимым условием является понимание деталей ее динамического поведения при действии возбуждающих сил, приложенных в различных точках системы. Двухкаскадные системы в силу большего количества элементов, входящих в систему, представляют более сложный объект для исследования. Для решения этой задачи использовались различные подходы, включая прямое получение необходимой информации путем замеров, математическое моделирование и точное решение дифференциальных уравнений движения, дискретное моделирование с помощью конечных элементов и решение результирующей системы дифференциальных уравнений второго порядка.
В данной работе рассматриваются следующие задачи: моделирование и анализ динамического поведения ДГУ как пространственной двухмассовой системы; разработка алгоритма и программного комплекса на его основе, позволяющего производить расчет собственных частот колебания рамы и ДГУ и построение амплитудно-частотных характеристик перемещений рамы и ДГУ.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДИЗЕЛЬГЕНЕРАТОРНОЙ УСТАНОВКИ
С ДВУХКАСКАДНОЙ СИСТЕМОЙ АМОРТИЗАЦИИ
Представим ДГУ с рамой как систему, состоящую из двух абсолютно жестких тел [2] (Рис. 2). Принимаем следующие допущения:
. резинометаллические амортизаторы ра- ботают в области малых упругих деформаций, жесткостная характеристика линейная;
. при внутреннем возбуждении ДГУ, определяемым неуравновешиванием двигателя демпфирование резинометаллическими амортизаторами незначительно;
. дизельный двигатель и генератор жестко связаны между собой и моделируются на эквивалентной расчетной схеме единой массой;
. каждая масса эквивалентной расчетной схемы имеет 6 степеней свободы;
. деформациями рамы, корпусных элементов дизеля и генератора пренебрегаем.
Введем неподвижную глобальную систему координат OXYZ. Кроме того введем локальные системы координат O 1 X 1 Y 1 Z 1 и O 2 X 2 Y 2 Z 2 для тел 1 и 2 соответственно. Точки O 1 и O 2 совпадают с центрами тяжести тел. Тело 1 (рама) установлено на упругих амортизаторах, имеющих
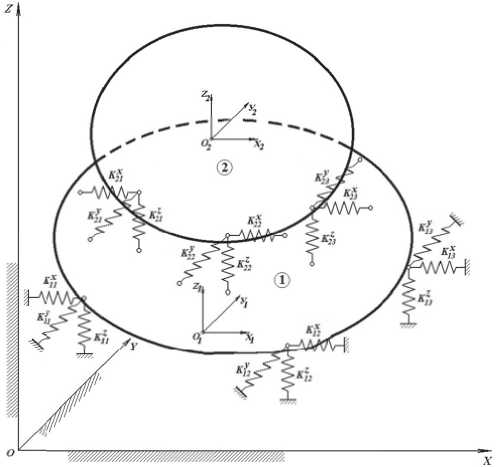
Рис. 2. Пространственная механическая система с упругими связями коэффициенты жесткости Kxi, Kyi и Kz1. Число амортизаторов первого ряда равно п1. Тело 2 (ДГУ) крепится к телу 1 на амортизаторах с коэффициентами жесткости Kx2, Ky2 и Kz2, число которых равно п2. Положение каждого i-го тела в глобальной системе координат определяется координатами центра масс (xi, yi и zi) и углами поворота локальной системы координат этого тела (фxi, фyi и фzi).
Математическая модель, описывающая динамическое поведение приведенной выше пространственной двухмассовой системы с упругими связями, представляет собой систему дифференциальных уравнений. Число уравнений равно 2*Ns, где Ns=6 - число степеней свободы для одного тела.
В матричном виде система дифференциальных уравнений имеет вид:
[ M ]{^}+[ K ]{q }={Q }, (1)
где [ M] - матрица масс,
[ K ] - матрица жесткости, { q } - вектор координат, { q } - вектор ускорений,
{ F } - вектор внешних сил.
Вектор координат формируется в виде:
{ q } = [ Х 1 , y, z i , j xi , j yi , j zi , x 2 , У2, z 2 , ф X2 , ф y2 , ф Z2 F- (2)
Вектор { F } формируется за счет неуравновешенности вращающихся деталей силовой установки. Поэтому внешнее воздействие является функцией времени, и его частота совпадает с частотой вращения коленчатого вала двигателя.
Матрица масс:
[ M = diag[ m i , m i , m i , J xi , J y, , J i , m 2 , m 2 , m 2 , J x2 , J, J ], (3) где m1 и m2 - массы рамы и силовой установки соответственно;
J xi , J yi J и J xi , J yi , J zi - моменты инерции рамы и силовой установки соответственно.
Матрица жесткости [ K ] является симметричной матрицей ( Kij=Kji ), ее формирование зависит от коэффициентов жесткости амортизаторов и их расположения в локальной системе координат:
n1n2
К1,1 = S k2 + S kXj i=1j n1n2
К 6 = - У kxly - У МД, , К . = 1 , 6 1i 1i 2j 2j 1 , 7
j = 1
i = 1
n2
К1,11 =- S k 2 j12 j ’ j = 1
n1 n2
’ K 1 , 5 = S kHl Zi + S k2j l Zj ’
i = 1
j = 1
n2
- S kj j=1
n2
K1,12 = S k2 JXi ’ j = 1
К,2 = К,3 = К1,4 = К,8 = К1,9 = К1, 10 = 0 , n1 n2
- S k»1»" S ВДг i=1 j = 1
n1n2
к 2,2 = S ky + S к^’К 2,4 = i = 1j n1n2
К 6=У k y l x + Tk y l
2 , 6 11 11 2 j *
j = 1
n2
- S k 2j ’ j = 1
x
2j ’ K 2 , 8
n2
К 2 , 12 = S k2jl2j ’ j = 1
К2,3 = К2,5 = К2,7 = К2,9 = К2,11 = 0 , n1 n2n1
n2
К 3 , 4 = S k 1i l 2i + S ky 2j ’
К ,=y k z + У k 3 , 3 11
i = 1 j = 1
n1
К
К
: 2) ’ n2
■35 =-У k^JXi -У kzl 3,5 Z1 11 2 j
i = 1
n2 zy
3 , 10 S 2j 2j
j = 1
’ К 3 , 11
i=1j n2
'2j ’ К3,9 =- S k2j ’ j = 1
n2
j = 1
К = КК == К, ,= К п
3,6 3,7 3,83,12
= S k lj l Xj ’ j = 1
= 0 ,
nl
n2
км = S kfi(l^i)2 + S k^Clip2 + i=l nln2
+ S kii(lfi)2 + S k^Cl^)2, i=l
К 4 , 5 =
К 4 , 6 =
^^^^B
j=l n1 zxy
S k1il1il1i i = 1
n1 yxz
S k1il1il1i
^^^^B
i = 1
n2
К4,8 = S k22jl"Zj ’ К j=1
n2
n2
S k2jl2jl2j ’ j=1
n2
yxz
S k2jl2jl2j ’ К 4,7
j = 1
n2
zy
4,9 S 2j 2j ’ j=1
n2
К4,10 =- S k2j (l2j)2 - S k2j (l2j )2 ’ j=1j n2n2
к 4 И = У kZilXiVyi , K4 = = У kyjixrzj , 4 , 11 2 2 j 2 j 4,12 2 j 2 j 2
j=1j nln2
k5,5=S kXi(l.i)2+S kx^l^)2 + i=ll nln2
+ S kn(ln)2 + S ki^lxp2, i=l
К, ^ 5 , 6
К 5 , 7 =
^^^^B
^^^^B
j=l n1n2
xyzx yz
S П,Н1,Н1,Н S n'2jl2jl2j ’ i=1j n2
S k^zj ’K5,8 = 0 ’ j=1
n2
К5,9 = S k2zjl2j ’ j = 1
n2
n2
zxy
К 5 , 10 S k 2 j l 2 j l 2 j ’
К
5 , 11 = S k 2j ^ l^ Zj )
j = 1
n2 xyz
К 5,12 S k2jl2jl2j ’ j=1
nl n2
j = 1
n2
- S k z^ l l2j > 2 , j = 1
К -Vky x 2+Vky x 2
^6,6 = S kli(lli) + S k2j(l2j) + i=l j=l nl n2
+ V kx y 2 + V kx y 2
+ S kli(lli) + S k2j(l2j)
i = l
j=l n2
К 7=y kXJXi, 6 97 ^^ 2j 2j j = 1
n2
К6,8 =-Sk2jl2j,K6,9 = 0’ j=1
n2
n2
yxz xyz
К 6,10 S k2jl2jl2j ’К 6,11 S k2jl2jl2j ’ j=1
j = 1
n2 n2
К, 12 = -У k y ( l xi ) 2 - ТЛп ( l yi ) 2 ’ 6 , 12 ^^ 2.1х 2j' ^^ 2jx 2j'
. j = 1 j = 1
|
К , 7 = |
— К1 , 7 ’ |
К 7 , 8 = К 7 , 9 = К 7 , 10 = 0 |
|
К7,11 = |
- К1,11 |
К = -К ’ 7,12 1 ^ 12 ’ |
|
К8,8 = |
- К2 , 8 ' |
К8 , 9 = К8 , 11 = 0 , |
8,10 2,10 ’ 8,12 2,12 ’ л9,9 3х 3,9 ’ ^9,10 3v0,10 ’
К9,11 = К3,11 ’ К9,12 = 0 ’ n2 n2
к 10,10 = Zkjlj2 + Zk2j(lj2 ’ j=1 j=1
К10,11 =
n2
-У k'lxvy.
2j 2j 2j j=1
К10,12
n2
- УкУУ'
2j 2j 2j j=1
n2n2
x z2z x2
K 11,11 = Z k2j (l2j ) + Z k2j (l2j ) ’ j = 1j
K11,12 =
n2
- Z k2jlyyjl2ij j = 1
n2n2
к 12 = Vk y ( l xi ) 2 + У k x ( l yi ) 2 ■ 6 , 12 ^^ 2Iх 2j' ^^ 2Iх 2j'
. j=1j
В формулах (4) lx1 , ly1 , lz1 , и lx2 , ly2 , lz2 – координаты крепления амортизаторов рамы и ДГУ в их локальных системах координат.
РЕЗУЛЬТАТЫЧИСЛЕННОГО ЭКСПЕРИМЕНТА
Для решения системы дифференциальных уравнений (1) в настоящей работе применяется метод временных конечных элементов [3]. Проверка работоспособности метода проводилась на трехмассовой системе с упругими связями, для которой имеется точное аналитическое решение [4]. Кроме того, предлагаемая методика использовалась при моделировании динамического поведения элементов ходовых систем гусеничных машин [5, 6].
На основе изложенного алгоритма был разработан программный комплекс, который позволяет моделировать динамическое поведение ДГУ при любой частоте воздействия. Для известных параметров ДГУ и рамы, а также параметров амортизационного соединения вычисляются динамические перемещения центров масс элементов системы и углы поворота тел относительно осей глобальной системы координат. Задавая приращение частоты внешнего воздействия с определенным шагом, можно вычислить максимальные амплитуды динамических перемещений. Это позволяет строить амплитудно-частотные характеристики ДГУ и рамы. Кроме того, в
Таблица 1. Параметры дизельгенераторной установки
|
1 локальная подсистема: Рама |
|||||||||||
|
Масса m i , кг |
Момент инерции J xi , кг*м2 |
Момент инерции J yi , кг*м2 |
Момент инерции J zi , кг*м2 |
Координаты центра масс |
|||||||
|
x , м |
У , м |
z , м |
|||||||||
|
290.000 |
24.212 |
102.239 |
117.825 |
-0.435 |
0.079 |
0.180 |
|||||
|
Параметры амортизационного крепления |
|||||||||||
|
№ |
Коэффициенты жесткости |
Координаты крепления |
|||||||||
|
k xi , кН/м |
k yi , кН/м |
k zi , кН/м |
l xi , м |
l yi , м |
l zi , м |
||||||
|
1. |
2646 |
1078 |
3871 |
-1.370 |
-0.380 |
0.000 |
|||||
|
2. |
2646 |
1078 |
3871 |
-1.370 |
0.380 |
0.000 |
|||||
|
3. |
2646 |
1078 |
3871 |
-0.532 |
-0.380 |
0.000 |
|||||
|
4. |
2646 |
1078 |
3871 |
-0.532 |
0.380 |
0.000 |
|||||
|
5. |
2646 |
1078 |
3871 |
0.148 |
-0.380 |
0.000 |
|||||
|
6. |
2646 |
1078 |
3871 |
0.148 |
0.380 |
0.000 |
|||||
|
7. |
2646 |
1078 |
3871 |
0.348 |
-0.380 |
0.000 |
|||||
|
8. |
2646 |
1078 |
3871 |
0.348 |
0.380 |
0.000 |
|||||
|
9. |
2646 |
1078 |
3871 |
0.548 |
-0.380 |
0.000 |
|||||
|
10. |
2646 |
1078 |
3871 |
0.548 |
0.380 |
0.000 |
|||||
|
2 локальная подсистема: ДГУ |
|||||||||||
|
Масса m 2 , кг |
Момент инерции J x2 , кг*м2 |
Момент инерции J y2 , кг*м2 |
Момент инерции J z2 , кг*м2 |
Координаты центра масс |
|||||||
|
x , м |
У , м |
z , м |
|||||||||
|
1683.000 |
177.114 |
723.428 |
673.264 |
-0.200 |
0.000 |
0.145 |
|||||
|
Параметры амортизационного крепления |
|||||||||||
|
№ |
Коэффициенты жесткости |
Координаты крепления |
|||||||||
|
kx 2 , кН/м |
ky 2 , кН/м |
kz 2 , кН/м |
1 x2 , м |
l y2 , м |
lz 2 , м |
||||||
|
1. |
3920 |
882 |
7056 |
-1.447 |
-0.387 |
-0.100 |
|||||
|
2. |
3920 |
882 |
7056 |
-1.447 |
0.387 |
-0.100 |
|||||
|
3. |
3920 |
882 |
7056 |
0.388 |
-0.365 |
-0.167 |
|||||
|
4. |
3920 |
882 |
7056 |
0.388 |
0.365 |
-0.167 |
|||||
|
5. |
3920 |
882 |
7056 |
0.528 |
-0.365 |
-0.167 |
|||||
|
6. |
3920 |
882 |
7056 |
0.528 |
0.365 |
-0.167 |
|||||
программном комплексе дополнительно реализовано вычисление собственных частот колебаний ДГУ и рамы на основе метода Якоби [7].
В качестве примера были проведены расчеты дизельгенераторной установки с двухкаскадным амортизационным креплением (Рис. 1), параметры которой приведены в таблице 1.
Для оценки динамического поведения исследуемой конструкции были построены амплитудно-частотные характеристики (АЧХ) продольных, поперечных и вертикальных пе- ремещений центров масс ДГУ и рамы в диапазоне частот внешнего воздействия от 1 Гц до 30 Гц с шагом изменения частоты 0.25 Гц. Кроме того проведен расчет также для наиболее удаленных от центров масс рамы и ДГУ точек крепления амортизаторов, так как это позволяет оценить влияние угловых перемещений элементов системы (Рис. 3). Собственные частоты колебаний рамы и ДГУ имеют следующие значения: f1=6.8 Гц, f2=10.7 Гц, f3=13.5 Гц, f4=45 9 Гц, f5=78.2 Гц, f6=73.9 Гц, f7=17.0 Гц, f8
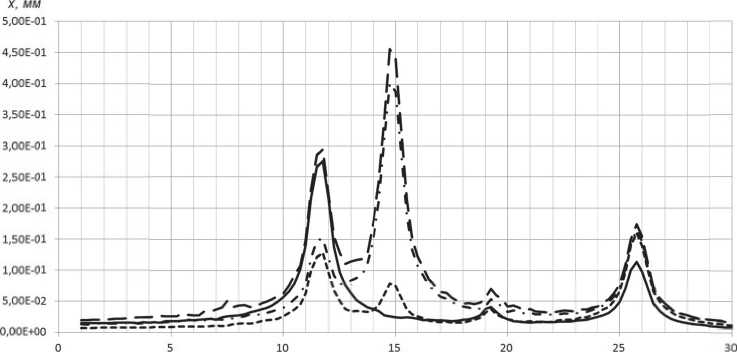
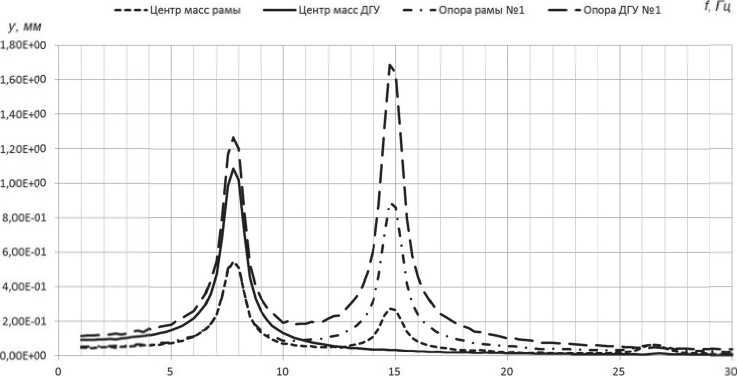
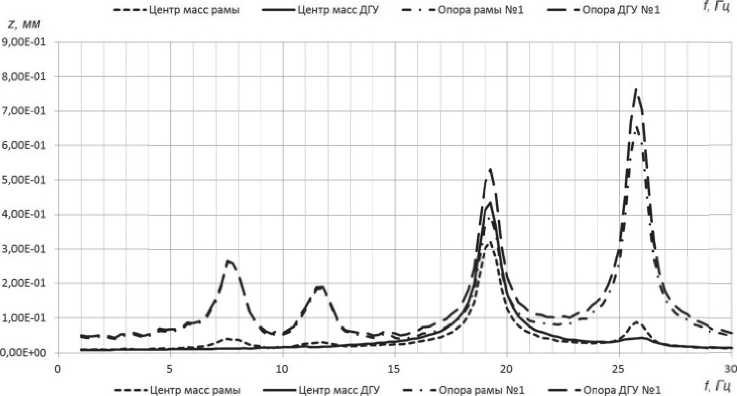
Рис. 3. Расчетные амплитудно-частотные характеристики
=23.0 Гц, f9 =22.8 Гц, f10=61,9 Гц, f11 =119.6 Гц и f12 = 128.8 Гц.
Анализ расчетных данных и графиков ам- 1.
плитудно-частотных характеристик показывает возникновение резонанса в областях собственных частот рамы и ДГУ. Приведенную конструкцию нельзя считать удачной, так как значения 2 некоторых собственных частот попадают в ра- .
бочий диапазон (для данной конструкции ДГУ рабочий диапазон составляет 15-25 Гц или 900- 3. 1500 об/мин).
ЗАКЛЮЧЕНИЕ
В заключение можно сделать следующие выводы: предложенная методика и разработанный на её основе программный комплекс 5. позволяют оценить динамические перемещения и динамическую нагруженность элементов амортизации ДГУ при различных параметрах внешнего воздействия. Кроме того, приведенный программный комплекс позволяет проанализировать влияние параметров амортизаци- 6.
онного крепления (количество, расположение, жесткостные характеристики амортизаторов) на динамическую нагруженность элементов с целью выявления направлений для улучшения существующих конструкций ДГУ с точки зрения 7. вибрационной защиты.
Список литературы Математическое моделирование динамического поведения дизельгенераторной установки с двухкаскадной системой амортизации
- Расчет амортизации главных двигателей и валопроводов силовых установок высокоскоростных судов: учеб. пособие/ В.Л. Химич, Ю.П. Чернигин. Нижегород. гос. техн. ун-т. - 2-е изд., перераб. -Н.Новгород, 2013. - 108 с.
- Тимошенко, С.П. Колебания в инженерном деле/ С.П. Тимошенко, Д.Х. Янг, У. Уивер. - М.: Машиностроение, 1985. - 472 с.
- Howard, G.F. The Accuracy and Stability of Time Domain Finite Element Solutions/ G.F. Howard, J.E.T. Penny // Journal of Sound and Vibration. - 1978. - № 61(4). - P. 585 - 595.
- Вербилов, А.Ф. Оптимизация параметров узлов ходовой части гусеничных машин с целью снижения их динамической нагруженности: дисc.. канд. техн. наук: 01.02.06 / А.Ф. Вербилов. - Барнаул, 2000. - 157 с.
- Вербилов, А.Ф. Влияние угловой и радиальной жесткостей резинометаллического шарнирного соединения гусеничного движителя на его динамическую нагруженность/ А.Ф. Вербилов, С.А. Коростелев // Научные проблемы транспорта Сибири и Дальнего Востока. - 2011.- № 1. - С. 180 - 183.
- Коростелев, С.А. Влияние характеристик жесткости опорных катков гусеничного движителя на их динамическую нагруженность / С.А. Коростелев, А.Ф. Вербилов, В.В. Ковалев // Известия Самарского научного центра Российской академии наук. - 2012. Т15, №4(2). - С. 515-518.
- Турчак, Л. И. Основы численных методов. - М.: Наука, 1987.
