Математическое моделирование динамики боковых нагрузок на технологическое оборудование лесопогрузчика

Автор: Черник Д.В.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Техника
Статья в выпуске: 7, 2013 года.
Бесплатный доступ
В статье приведены результаты исследования влияния скорости движения, высоты препятствия, смещения центра тяжести дерева относительно продольной оси гусеничного лесопогрузчика на уровень динамических нагрузок. В результате машинного эксперимента были найдены величины динамических нагрузок, возникающих на корпусе лесопогрузчика и технологическом оборудовании при воздействии возмущающих факторов. Приведены графики зависимости динамических нагрузок от возмущающих факторов.
Гусеничный лесопогрузчик, имитационная модель, динамические нагрузки, возмущающие факторы
Короткий адрес: https://sciup.org/14083140
IDR: 14083140 | УДК: 630.377.4
Mathematical modeling of lateral load dynamics on the logger technological equipment
The research results of influence of movement speed, obstacle height, tree gravity center displacement relative to the caterpillar logger longitudinal axis are presented in the article. As a result of the machine experiment the values of the dynamic loads arising on the logger case and the technological equipment at the disturbing factor influence are found. The dynamic load dependence graphs according to disturbing factors are given.
Текст научной статьи Математическое моделирование динамики боковых нагрузок на технологическое оборудование лесопогрузчика
Введение. В режиме грузового хода гусеничного лесопогрузчика возникают динамические нагрузки на технологическое оборудование в боковом направлении при наезде на препятствие одним бортом машины, при смещении центра тяжести груза относительно продольной оси, при движении машины поперек уклона погрузочной площадки. Кроме того, при колебаниях пакета хлыстов вследствие разности жесткости и массы вершинной и комлевой частей деревьев в поперечной плоскости возникает дополнительный момент. Совпадение указанных факторов во времени обуславливает экстремальные режимы работы, которые необходимо учитывать при проектировании лесопогрузчиков [1–3].
Несмотря на значительное количество работ по исследованию лесопогрузчика перекидного типа, до настоящего времени нет исследований следующих вопросов:
-
1. Нет исследований динамики нагрузок на элементы конструкции лесопогрузчика, возникающих в поперечно-вертикальной плоскости при движении с грузом через препятствия одним бортом с учетом смещения центра тяжести груза относительно продольной оси машины.
-
2. Отсутствуют данные о влиянии параметра смещения центра тяжести груза относительно продольной оси лесопогрузчика на величину дополнительных динамических нагрузок.
Исследование этих вопросов необходимо для обоснованного выбора расчетных параметров кинематической схемы технологического оборудования повышения надежности лесопогрузчиков при проектировании.
Исходя из этого, целью настоящего исследования является совершенствование технологического оборудования гусеничного лесопогрузчика на основе анализа динамики боковых нагрузок.
Для достижения поставленной цели необходимо решить следующие задачи:
-
1. Разработать эквивалентные динамические модели системы «лесопогрузчик-груз» при различных сочетаниях подвески корпуса машины и вида транспортируемого груза.
-
2. Разработать математические модели, учитывающие влияние на уровень нагрузок ряда эксплуатационных факторов: скорости движения, высоты преодолеваемых препятствий, упругих характеристик деревьев, смещения центра тяжести груза от продольной оси машины, угла уклона погрузочной площадки.
-
3. Выполнить экспериментальные исследования с целью установления достоверности теоретических исследований.
-
4. Разработать рекомендации по снижению динамических боковых нагрузок на технологическое оборудование лесопогрузчиков на базе лесопромышленных тракторов.
Математическая модель
Для исследования величины динамических нагрузок в боковом направлении были разработаны дифференциальные уравнения, представленные ниже:
m 2 1 32 в 2 + C ' 2 ( У 2 -в k l 3 У 3 + K ' 2 ( У 2 — в k l 3> 3 = Q 2 (t )
m 2 l .2 е 4 + C 'У.y 4 “P k l 4 } l 4 + K 2 ( у 4 -в k l 4 У4 = Q 4 ( t )
( m , + m 2 ) l^ c - C x (в c -в . X2 + C '2 ( У 2 — в k l 3 У 3 — C 22 ( У 4 — в k l 4 V4 = Q . ( t )> m 3 P 2 в k + C в k - C x ( в c -в k К + C '2 ( У 2 -в t l 3 ) l 3 - C Я У 4 -в J 4 У4 = Q 3 ( t )
/ x г т / \ 2-i K nV 2 n h max s''tsxr<2n Vt
Q1 (t) — [JC1 + (ml + m2 )rC ] j 72 COS ~;
LLL
2^ K n V h max СПХ^П^
Q 2( t) = (J в + m 2 r2) j 2-2
LK LL
2 1 K n V 2 n h max 2 П Vt
Q 3 ( t ) — [ J C 3 + m 3 r K )] J 22 COS ;
L K L L
Q 4 ( t ) - ( J K + m 2 r 4 )
K n V ^ l^ L k L 2
COS ^Vt . L
Левые части уравнений (1) отображают состояние рассматриваемой системы и включают ее основные динамические характеристики – C i , m i , η i , ω i , а также геометрические параметры. Правые части указанных уравнений (2) представляют собой внешние возмущающие воздействия на систему. Они включают в себя эксплуатационные факторы h max , V , от которых зависит уровень внешних возмущений на систему и величина динамических нагрузок на элементы системы.
Анализ результатов моделирования
Анализ влияния эксплуатационных факторов на уровень динамических нагрузок проводился на имитационной модели, разработанной на ЭВМ в среде Mathcad. Расчетное дерево принималось диаметром 0,68 на высоте груди, длина его составляла 24 м. Варьируемыми параметрами являлись h max (высота препятствия), V (скорость движения лесопогрузчика), Х (величина смещения центра тяжести дерева относительно продольной оси лесопогрузчика). Модель была разработана таким образом, что изменение параметра Х влекло за собой изменение таких параметров, как l 3 , l 4 (расстояния от продольной оси машины соответственно до центров масс вершинной и комлевой частей расчетных деревьев); C ‘ , C " (изгибная жесткость вершинной и комлевой частей расчетных деревьев, приведенных в их центры масс). При каждом эксперименте фиксировались максимальные динамические моменты, возникающие на стреле и корпусе лесопогрузчика.
Анализ результатов моделирования показал, что смещение центра тяжести дерева относительно продольной оси лесопогрузчика в сторону комлевой и вершинной частей вызывает значительное увеличение динамических нагрузок в боковом направлении.
Установление влияния данного фактора проводилось при скорости движения лесопогрузчика, равной 0,75 м/с, и высоте препятствия 0,20 м.
На рисунках 1 и 2 отображены графики зависимости моментов M 1 и M 3 от смещения центра тяжести дерева относительно продольной оси лесопогрузчика для сосны и ели II, III, IV разрядов. На рисунках 3 и 4 отображены графики зависимости коэффициентов динамичности от смещения центра тяжести дерева в захвате относительно продольной оси лесопогрузчика в условиях свободных угловых перемещений зажатой части дерева для сосны и ели II, III, IV разрядов.
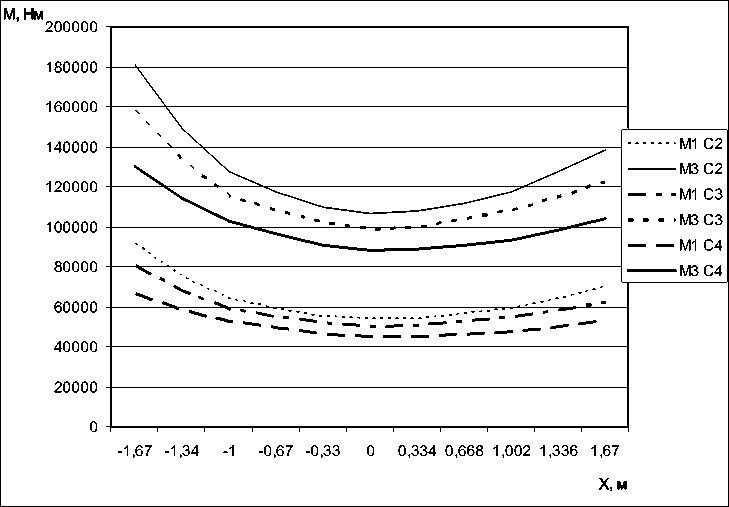
Рис. 1. График зависимости моментов M 1 и M 3 от смещения центра тяжести дерева относительно продольной оси лесопогрузчика (сосна II, III, IV разрядов). Здесь и далее: М1 – момент, возникающий на технологическом оборудовании; М3 – момент, возникающий на корпусе лесопогрузчика
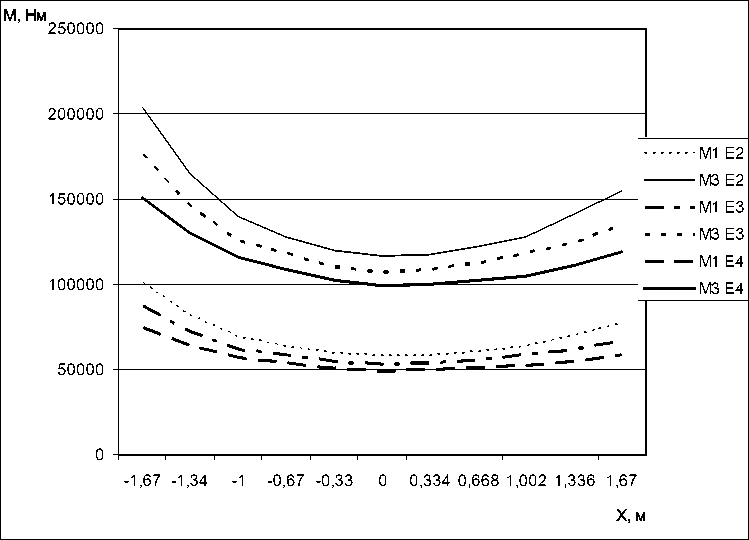
Рис. 2. График зависимости моментов M 1 и M 3 от смещения центра тяжести дерева относительно
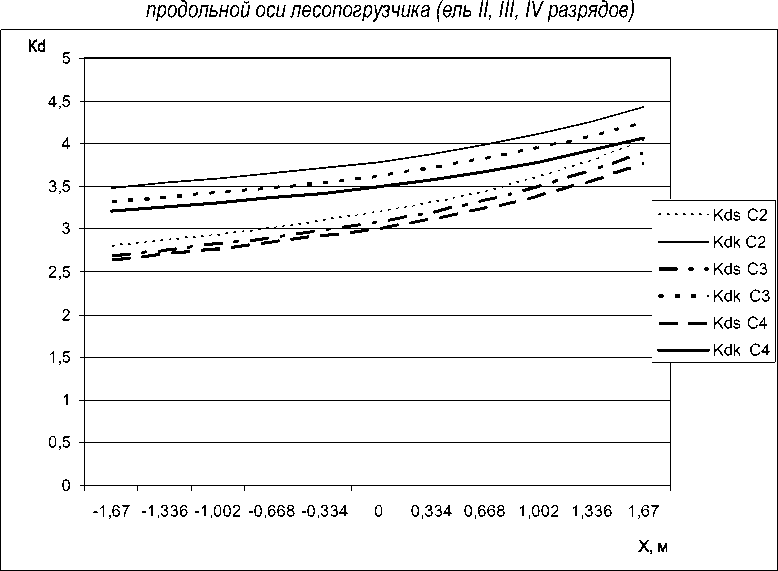
Рис. 3. График зависимости коэффициентов динамичности от смещения центра тяжести дерева в захвате относительно продольной оси лесопогрузчика (сосна II, III, IV разрядов). Здесь и далее: Kds – коэффициент динамичности технологического оборудования, Kdk – коэффициент динамичности трактора
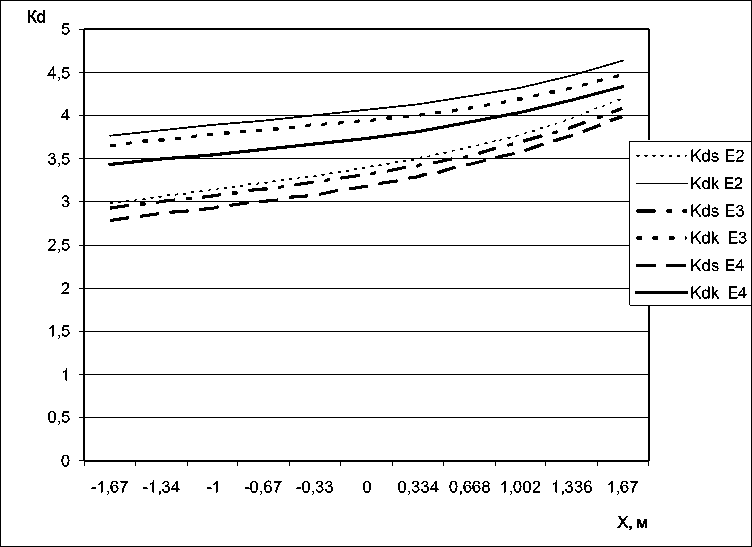
Рис. 4. График зависимости коэффициентов динамичности от смещения центра тяжести дерева в захвате относительно продольной оси лесопогрузчика (ель II, III, IV разрядов)
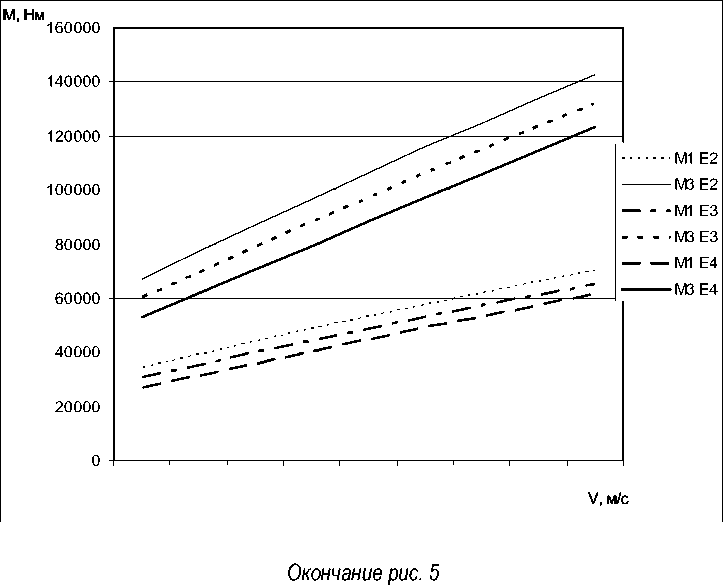
При изменении скорости движения лесопогрузчика в момент наезда на препятствие одним бортом изменяется ускорение наезжающего борта в вертикальном направлении. Следовательно, динамические нагрузки, возникающие в боковом направлении, также меняют свою величину. Исходя из этого, можно предположить, что при увеличении скорости движения лесопогрузчика в момент наезда последнего на препятствие увеличивается ускорение наезжающего борта в вертикальном направлении, соответственно увеличиваются динамические нагрузки в боковом направлении. На рисунке 5 показана зависимость моментов, возникающих в вертикально-поперечной плоскости, от скорости движения лесопогрузчика.
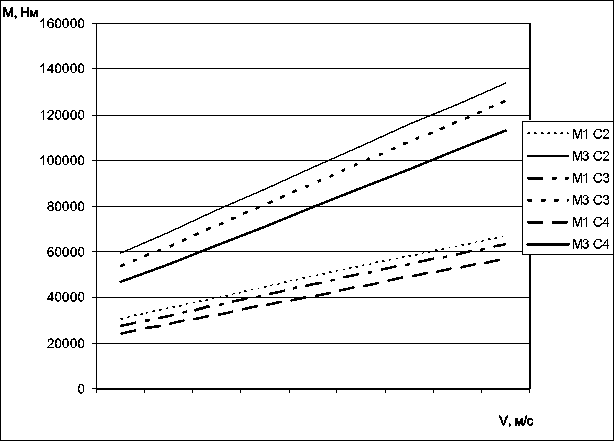
Рис. 5. График зависимости моментов, возникающих в вертикально-поперечной плоскости, от скорости движения лесопогрузчика
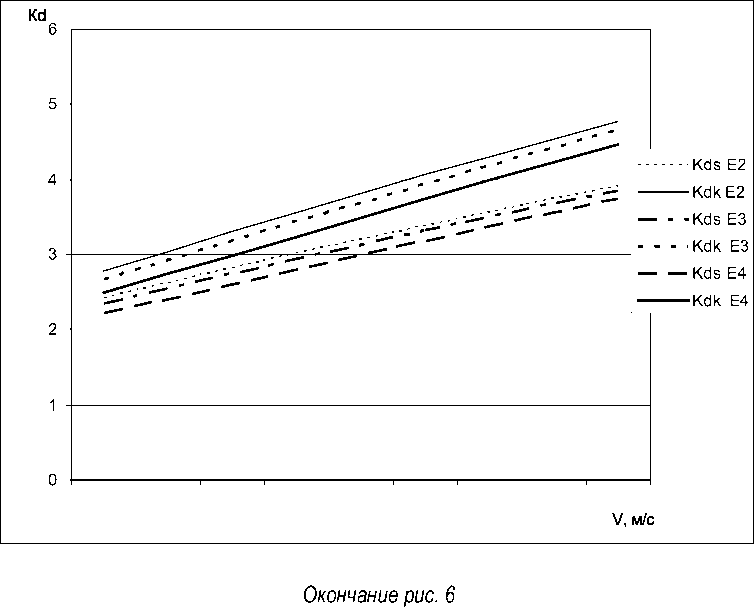
На рисунке 6 изображен график зависимости коэффициентов динамичности технологического оборудования и трактора от скорости движения лесопогрузчика.
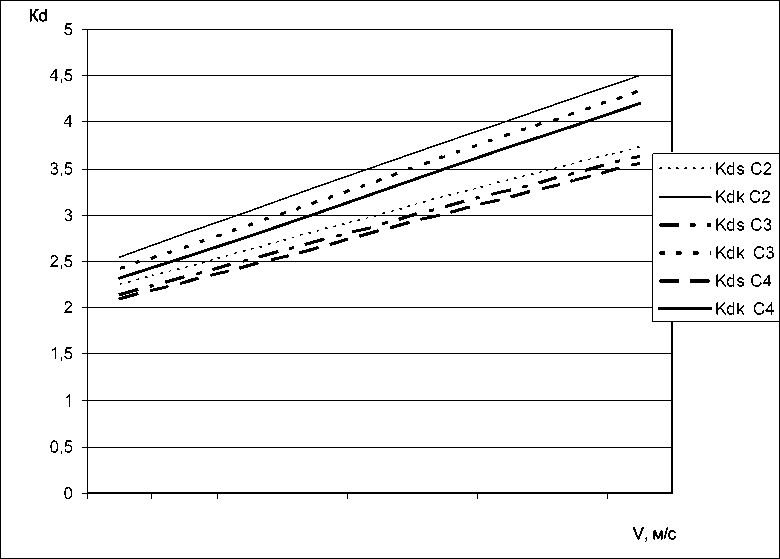
Рис. 6. График зависимости коэффициентов динамичности от скорости движения лесопогрузчика
При составлении выражений правых частей уравнений для исследования влияния высоты препятствия принимались: V = 0,75 м/с = const; X = 0 = const. Шаг изменения h max принимался 0,05 м. Уравнения решались по следующим значениям h max : 0,10; 0,15; 0,20; 0,25.
На рисунке 7 показана зависимость моментов, возникающих в вертикально-поперечной плоскости, от высоты препятствия.
Рис. 7. График зависимости моментов, возникающих в вертикально-поперечной плоскости, от высоты препятствия
На рисунке 8 изображен график зависимости коэффициентов динамичности технологического оборудования и трактора от высоты препятствия.
Рис. 8. График зависимости коэффициентов динамичности от высоты препятствия
Заключение. Эксплуатационные параметры V и h max оказывают существенное влияние на величину динамических нагрузок:
-
- с увеличением V от 0,50 до 0,90 м/с коэффициенты динамичности нагрузок, действующих на технологическое оборудование, возрастают в 1,66…1,70 раза; нагрузок, действующих на корпус лесопогрузчика, – в 1,72…1,81 раза.
-
- с увеличением h max от 0,10 до 0,25 м коэффициенты динамичности нагрузок, действующих на технологическое оборудование, возрастают в 1,40…1,43 раза; нагрузок, действующих на корпус лесопогрузчика, – в 1,38…1,41 раза.
Смещение центра тяжести дерева относительно продольной оси лесопогрузчика оказывает существенное влияние на динамику боковых нагрузок. При смещении центра тяжести в сторону комлевой части дерева рост динамических нагрузок на элементах конструкции варьируется в пределах 41,3…52,2%, при смещении центра тяжести дерева в сторону вершинной части рост динамических нагрузок на элементах конструкции – в пределах 18,2…27%.
