Математическое моделирование динамики системы с N телами, закрепленными на двух упругих стержнях

Автор: Мижидон А.Д., Хамханов А.К.
Журнал: Вестник Бурятского государственного университета. Химия. Физика @vestnik-bsu-chemistry-physics
Статья в выпуске: 2, 2025 года.
Бесплатный доступ
В статье представлен вывод математической модели механической системы, состоящей из (n) тел, закреплённых пружинами между двумя упругими стержнями. Работа продолжает цикл исследований, посвящённых изучению и моделированию гибридных систем дифференциальных уравнений, описывающих динамику сложных механических конструкций. Ключевой новизной является анализ случая крепления тел на два стержня, что расширяет спектр исследуемых моделей и позволяет учитывать дополнительные аспекты взаимодействия между компонентами системы. Разработанная модель отражает упругие деформации стержней, их взаимное влияние и динамическое поведение тел. Полученные результаты применимы для оценки устойчивости и оптимизации подобных систем в инженерной практике. Уравнения движения системы выведены с использованием вариационного подхода, обеспечивающего их формулировку в обобщённом виде.
Гибридная система дифференциальных уравнений, вариационный принцип Гамильтона — Остроградского, балка Эйлера — Бернулли, твердое тело, обобщённая математическая модель
Короткий адрес: https://sciup.org/148331956
IDR: 148331956 | УДК: 519.62:519.63 | DOI: 10.18101/2306-2363-2025-2-29-35
Mathematical Modeling of the Dynamics of a System with n Bodies Mounted on Two Elastic Beams
The article presents the derivation of a mathematical model for a mechanical system consisting of n bodies mounted on two elastic beams. The Hamilton–Ostrogradsky variational principle is applied to derive the equations of motion, which are obtained in a generalized form. This study continues a series of previous works devoted to the analysis and modeling of hybrid systems of differential equations that describe the behavior of mechanical systems with complex structures. The main novelty of the research lies in considering the case of mounting bodies on two beams, which expands the class of models under investigation and allows for the inclusion of additional interaction factors between the system's components. The developed model accounts for elastic deformations of the beams, their mutual influence, and the dynamic behavior of the bodies. The results obtained can be used for stability analysis and optimization of similar systems in engineering applications.
Текст научной статьи Математическое моделирование динамики системы с N телами, закрепленными на двух упругих стержнях
Настоящая работа посвящена дальнейшему развитию исследований, начатых в публикациях [1–4], в области математического моделирования динамики механических систем, включающих упругие элементы и закреплённые на них тела.
Ранее в работе [1] была представлена обобщённая математическая модель для систем с одним упругим стержнем, а также разработан универсальный подход к анализу свободных колебаний этого класса моделей [2]. В данном исследовании предложенный подход развивается путём перехода от системы с одним стержнем к системе с двумя стержнями, что расширяет возможности моделирования более широкого спектра механических систем. В работах [3–4] рассматривались случаи с одним и тремя телами. Это исследование обобщает полученные ранее резуль- таты на систему, состоящую из (n) тел, закреплённых пружинами на двух горизонтальных упругих стержнях.
Для получения уравнений движения применён вариационный принцип Гамильтона — Остроградского, который обеспечивает гибкость и точность в учёте связей между телами и стержнями. Итоговая система уравнений относится к классу гибридных систем дифференциальных уравнений, комбинирующих обыкновенные дифференциальные уравнения и уравнения в частных производных, что требует использования специализированных методов решения.
Новизна исследования заключается в изучении системы с креплением тел на двух упругих стержнях, что ранее не рассматривалось в рамках данного подхода. Разработанная модель позволяет анализировать дополнительные факторы взаимодействия и расширяет возможности исследования динамических характеристик сложных конструкций.
Такие модели находят применение в проектировании высокоточных динамических систем, а также в исследованиях по управлению и оптимизации сложных механических конструкций, включая микроэлектромеханические системы (MEMS), робототехнические устройства и другие инженерные структуры.
1 Постановка задачи
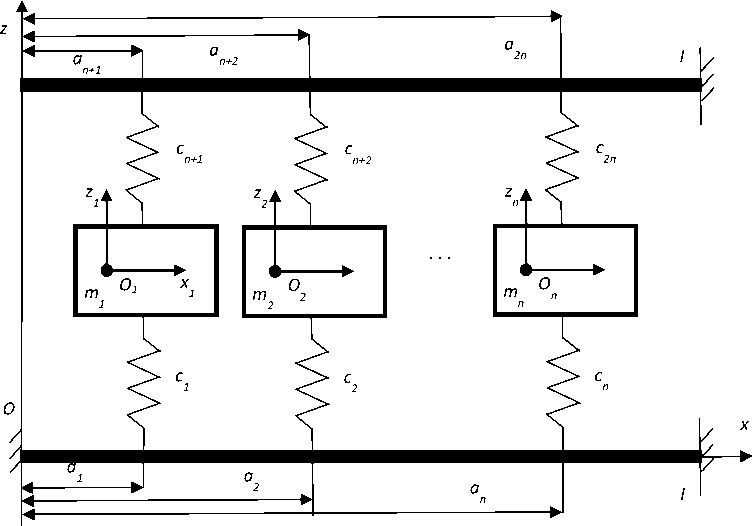
Рис. 1. Механическая система из n тел, закрепленных на двух упругих стержнях
Рассмотрим механическую систему (рис. 1), состоящую из n горизонтально расположенных тел, закреплённых пружинами между двух упругих стержней. Концы стержней жестко закреплены. В качестве модели упруго стержня рассматривается балка Эйлера — Бернулли.
Задача состоит в построении математической модели, описывающей малые поперечные колебания такой системы, с учётом упругих свойств стержней, инерционных характеристик тел и условий взаимодействия между телами и стержнями.
2 Математическая модель
Обозначим прогибы стержней в точке x в момент времени t функциями u1 (x, t), u2 (x,t) . Так как тела совершают поступательные движения только в направлении оси Oz и могут совершать угловые отклонения рг, i = 1,2 ...п перемещения точек тел с координатами x , z будут иметь вид:
z = zm,+ Z' + x'^ , (1)
где zm i ( t ) — перемещения центров масс твердых тел.
Вследствие этого координаты точек крепления пружин к твердым телам будут иметь вид:
Z i , j = z mi + Z ' +n + di + j^n ^ n , i = 1•• n , J = { 0,1 } , (2)
где за координату X принимается отклонение точки крепления пружины от центра масс тела по оси Ох, и для удобства обозначим ее как di , где i — номер пружины. А Z' — отклонение от центра масс по оси Oz точки крепления пружины номер i. При j = 0 соотношение (2) описывает координаты точек крепления пружин, прикрепленных к нижнему стержню, а при j = 1 — к верхнему.
Составим интеграл действия по Гамильтону. Для рассматриваемой системы он будет иметь следующий вид:
t 1
j 6(Т - U) dt = 0,(3)
t 0
где T и U — кинетическая и потенциальная энергии системы и для них справедливо следующее уравнение:
2n и = y U + Uc, T= У T + T(4)
i=1
где:
2 n
У U i — сумма потенциальных энергии пружин;
i = 1
U c — сумма потенциальных энергии стержней;
n
Ут— i=1
сумма кинетических энергии тел;
Т с — сумма кинетических энергии стержней.
Запишем соотношения для Ui с учетом соотношения (2)
U i =
c i ( z m - z ‘ + di P i — U 1 ( a i , t )) 2 + c n + i ( z m + Z + + d n+i Pj — u 2 ( a n+i , t))2
где сi
— коэффициенты упругости пружин.
, i = 1..n , (5)
Кинетические энергии Ti имеют вид:
T =
mz I p i mi p
---- + ——, i = 1.. n
22 ,
где m, — массы тел, а I
I р/
момент инерции тела относительно оси, проходя-
щей через его центр масс при угловых отклонениях р .
Энергия стержней в соответствии с моделью балки Эйлера-Бернулли будет иметь следующий вид:
l
T = ?(/
l
du1 dt
l

2 l du. , 2 dx + j e 2 i 2< dx 0
du 2 ) 2 dx ), dt
d 2 u 2 ) 2 dx ) dx 2
,
где pF — линейная плотность массы, a EI - изгибная жёсткость.
Перепишем интеграл действия по Гамильтону с учётом соотношений для потенциальной и кинетической энергий (4) — (7)
t 1
n
J=12
2 mz m +
^ ci(zi,0 “ u 1 ( a i ,t))2 c n + ( z ij — Щ^п+^ У)
t 0
t 1
+
i = 1
V 2 2
12 Y
- di +
)_
(д 2 , T .
—- u. (x,t) dx dt +
t1 1 ( д 1c
J 2JP1F1 lau1(x,t)ldx“^EI1
0 V tl J 0
l
l
t 0
+
V
J
Jd д
dt .
t 0
Заметим, что функционал действия зависит от перемещений центров масс тел
zm
.
,
угловых отклонений тел j, а также от прогибов нижнего и верхнего стержней и1,и2- Запишем вариацию для центров масс zm. при i 6 [1,п]: t1 ^ J- = J( mzm “ ci[ Z-0 “ u1 ( ai ’ t )]“ cn+i[z* “ u2 ( an+i ’ t )])Jzmdt ’ (8) t0 Вариация для угловых отклонений тел р^ при i 6 [1, п]: t1 J =f( I^^Pi - cd[zifi - u1 ( ai,t)]-cn-dn-z - u2 ( an+i ’t)])5Pdt• (9) t0 Вариация для прогибов нижнего и верхнего стержней и1, и2. #J u1 t11 f = П cl [ ^1 to 0^ - U1 ( x, t) - PF1 d2u1 It^ — E1I1 d 4Ui^ dx4 5u1dxdt t1 l ^JU2 =П t0 0 c4 I u z6 - U2 (x, t) -PF2 d 2u2 dt2 F I E2I2 54U2 ] dx4 ^ 5u2dxdt Применим основную лемму вариационного исчисления к 8–10 и получим искомую математическую модель в виде гибридной системы дифференциальных уравнений. mizm,-ci [ zi,0 - ui ( ai■, t )] -cn+i [ zi1- u2 ( an+i■,t)] = 0’ i = 1..n; Ip,8-cidi [ z’0 - ui ( ai’ t )]-cn+idn+i [ z,1 - u2 ( an+i’ t )] = 0’ i = 1-n * PF1 + EI = ^ci [zi-0 - u1 (x,t)] 5 (x-ai ) Ct Oxi PF2 + E2I1 du2= ^^[z^ - u2 (x’t)] 5 (x - an+i )• Gt dxi где на функции и^х, t), и2(х, t) в силу способа закрепления стержней действуют следующие граничные условия: и1(0, t) = и1(1. t) = 0, U2 (0, t) = и2 (I, t) = 0, ^^(0,О = ^^(г,г) = 0’ d-^(0,t)=d-^(l,t) = 0. U Л л Заключение В статье разработана математическая модель, описывающая динамику механической системы из (n) твёрдых тел, закреплённых на двух упругих стержнях. Модель учитывает поступательное и вращательное движение тел, а также поперечные колебания стержней, описываемые в рамках теории балки Эйлера– Бернулли. Уравнения движения получены с применением вариационного подхода, основанного на принципе Гамильтона — Остроградского. В результате получена гибридная система дифференциальных уравнений. Данная модель может быть использована в дальнейшем при уточнении обобщенной модели на случай крепления тел между двух упругих стержней.
