Математическое моделирование многокомпонентных перемещений и оптический метод их измерения

Автор: Нестеров Владимир Николаевич, Мухин Василий Михайлович, Нестеров Дмитрий Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4-7 т.18, 2016 года.
Бесплатный доступ
В статье даны основы оптических измерений информативных составляющих сложных перемещений подвижных объектов на основе метода многомерных тестовых объектов. Дана концепция векторной многокомпонентной физической величины, которая представляет собой новый взгляд на векторные величины в целом и на величины, характеризующие перемещения и деформации механических систем и других механических объектов, в частности. Приведенный в работе аппарат формального построения моделей многокомпонентных перемещений позволяет автоматически включить встраивание в них информативных составляющих многокомпонентных многомерных тестов, что делает процедуру реализации метода измерения логически завершенной.
Моделирование многокомпонентных перемещений, оптический метод измерения, метод многомерных тестовых объектов
Короткий адрес: https://sciup.org/148204855
IDR: 148204855 | УДК: 681.2.083
Mathematical modeling of multi-component displacements and the optical method of their measurement
The article describes fundamentals of optical measurements of informative components complicated displacements of moving objects based on the method of multivariate test objects. Basic idea introduces the concept of a vector multi-component physical quantity that represents a new view on the vector quantities and on the values that characterize the movement and deformation of the mechanical systems and other mechanical objects. This paper presents a method of formal construction of multi-component displacement models, which can automatically embed them in-formative components of multi-component multivariate test objects. This makes the procedure of implementation of the method of measurement logical conclusion.
Текст научной статьи Математическое моделирование многокомпонентных перемещений и оптический метод их измерения
перемещений контролируемых объектов и разработки их метода измерения.
Вопросы моделирования сложных многокомпонентных перемещений простых и достаточно простых объектов решались в ряде работ еще в девяностых и нулевых годах [3-7]. Вопросы моделирования многокомпонентных перемещений сложных объектов выходят за рамки настоящей работы, однако одним из приложений развиваемого подхода является задача калибровки манипуляторов универсальных промышленных роботов, которые, несомненно, могут быть отнесены к классу сложных механических систем [8]. Модели сложных перемещений шестизвенных манипуляторов еще более усложняются, однако моделирование многокомпонентных перемещений составляющих цепочку манипулятора звеньев может рассматриваться как моделирование многокомпонентных перемещений простых объектов далее встраиваемых в более сложные модели всего манипулятора [9]. Поэтому принципиальное значение имеет вопрос обоснования и разработки общей идеологии моделирования сложных многокомпонентных перемещений простых или достаточно простых, но деформируемых объектов, с целью выявления компонентов перемещений и деформаций, источниками которых могут служить совершенно различные факторы. Соответственно, отдельные компоненты таких многокомпонентных перемещений и деформаций носят информативный характер и могут являться измеряемыми величинами. Осознание этой проблемы привело к созданию концепции векторных многокомпонентных физических величин, базирующейся на следующих трех положениях [4-7]:
. векторные многокомпонентные физические величины рассматриваются как вектор-функции множества составляющих их информативных компонентов;
. функции связи названных информативных компонентов в моделях многокомпонентных физических величин определяются законами векторной алгебры;
. информационные модели векторных многокомпонентных физических величин допускают многовариантность представления указанных информативных составляющих в зависимости от объекта исследования и поставленной задачи.
Перечисленные положения являются основой для построения моделей многокомпонентных перемещений и деформаций подвижных объектов, отражающих сложные процессы, происходящие с движущимися объектами.
ОБОБЩЕННЫЕ МАТЕМАТИЧЕСКИЕ МОДЕЛИ СЛОЖНЫХ МНОГОКОМПОНЕНТНЫХ ПЕРЕМЕЩЕНИЙ ПОДВИЖНЫХ ОБЪЕКТОВ
В общем виде математическая модель векторной многокомпонентной физической величины, включающая в себя информативные компоненты и отражающая сложные процессы, происходящие с движущимся объектом, в декартовой системе координат представляется следующим образом:
X x (r,T ) F(x1 x (r,T ) ’•••’ xpx (r,T ));
X y ( r , T ) = F ( x i y ( r , T ) ,..., x py ( r , ^ ) ) ; - X z ( r , T ) = f ( x i z ( r , t ) ,,„, x pz ( r , T ) ) ,
где X x ( r , T ) , X y ( r , T ) , X z ( r , T ) - проекции многокомпонентных перемещений на координатные оси декартовой системы координат; x i k ( r , T ) ,•••, x pk ( r , T ) - информативные компоненты k -й координатной составляющей ( k e { x , y , z } ) многокомпонентного перемещения X ; r , T - пространственные и временные координаты; F – функция связи, определяемая физикой исследуемого объекта или процесса.
В случае линейности модели (1) в соответ- ствии с перечисленными положениями векторной многокомпонентной физической величины она представляется в виде векторной суммы соответствующих информативных составляющих (компонентов):
ppp
где 2 xjx(r,T), 2 xjy(r,T), 2 xjz(r,T)- j=1
j• = 1
j = 1
векторные суммы p информативных компонентов координатных составляющих величины X .
Модели (1) и (2) отражают системный взгляд на проблему представления сложных перемещений подвижных объектов, направленный на сведение многообразия имеющих место информативных компонентов названных величин в единую теоретическую картину.
Поскольку информативные компоненты x jx ( r , T ) , x jy ( r , T ) , x j z ( r , T ) , зашитые в модели (2) представляют интерес, они должны быть измерены. Проблема кроется в самой природе этих величин. Они имеют одинаковую физическую размерность, перекрывающийся в значительной степени или совпадающий спектральный диапазон, и поступают на входы измерительных устройств в виде векторных сумм X x ( r , T ) , X y ( r , T ) , X z ( r , T ) . Поэтому известные методы и средства измерения не селективны по отношению к составляющим их компонентам x jx ( r , T ) , x jx ( r , T ) , x j z ( r , T ) . Решение обозначенной проблемы предложено на основе организации информационной избыточности на входе измерительных устройств [10].
МЕТОД МНОГОМЕРНЫХ ТЕСТОВЫХ ОБЪЕКТОВ
Сущность метода многомерных тестовых объектов сводится к тому, что для обеспечения процесса измерения информативных составляющих перемещений контролируемого объекта оптическим методом с объектом связывается распределенный в пространстве контрольный объект, обладающий известными с высокой точ- ностью геометрическими параметрами, которые используются в процессе реализации метода в качестве мер [11]. Особенностью метода является то, что параметры многомерного тестового объ- екта отражают многомерность контролируемых перемещений и функционально связываются с ними в процессе формирования моделей для дальнейшей реализации метода. Соответственно в модель (1) вводятся математические объекты L1 k,..., Lqk, отражающие использование нового физического объекта, получившего название
X x ( r , T ) = 2 x jx ( r , T ) ;
j = 1
Z X P Z X
X y ( r , T ) = 2 x jy ( r , T ) ; ^ j = 1
p
X z ( r , T ) = 2 x jz ( r , T ) , j = 1
тестового:
X x ( r ,T ) = F ( x 1 x ( r ,T ) , X y ( r ,T ) = F ( x 1 y ( r ,T ) ,.
X z ( r ,T ) = f ( x 1 z ( r ,T ) ,
•, x px ( r ,T ) , L 1 x ,, x py ( r ,T ) , L 1 y ,-
-, x pz ( r ,T ) , L 1 z ,-
-, L qx ) ;
-, L qy ) ; ' (3)
L )
-, ^qz /, J
где L 1 k ,..., L qk — компоненты k -й координатной составляющей L k многомерного теста L ; q - количество компонентов k -й коор-
динатной составляющей L k многомерного теста L ; F – функция связи компонентов x 1 k ( r ,T ) ..... x pk ( r ,T ) и L 1 k ,-, L qk кооРДи-натной составляющей L k ( k e { x , y , z } ) многомерного теста L .
Таким образом, модель (3) по сравнению с моделью (1) является информационно избыточной за счет ввода в нее компонентов L i k ,..., L qk , связанных с параметрами многомерного тестового объекта.
Проводя аналогию между параметрами (составляющими) многомерного тестового объекта и составляющими сложных перемещений, компоненты многомерных тестов или их проекции на координатные оси будем рассматривать как многокомпонентные величины - многокомпонентные тесты, составляющие которых также являются векторными величинами. Соответственно, общая методика формирования многомерных тестов и функции связи их компонентов с моделируемыми величинами подпадают под основные положения концепции векторных многокомпонентных физических величин и формулируются следующим образом:
. многомерные многокомпонентные тесты – векторные величины и рассматриваются как функции множества составляющих их компонентов;
. функции связи названных компонентов в моделях многокомпонентных тестов определяются законами векторной алгебры;
. модели векторных многомерных многокомпонентных тестов допускают многовариантность представления указанных составляющих в зависимости от решаемой задачи.
Опираясь на приведенные положения о многомерном тесте, формируемом на базе многомерного тестового объекта, можно определить вид функции связи информативных компонентов x i k ( r ,т ) ..... x pk ( r .т ) и компонентов L i k ,..., L qk k -й координатной составляющей L k многомерного теста L в модели (3):
{ x.y.z q { x,y,z } p
= Z Z viuk L iuk + Z Z nyk x ijk ( r ,T ) , (4) ku = 1 k j = 1
где i – порядковый номер функции связи; k e { x , y , z } - множество координатных составляющих; u – порядковый номер компонентов многокомпонентного теста L iuk ; j – порядковый номер информативных компонентов к -й координатной составляющей многокомпонентного перемещения X k ( r , т ); V iuk e [ 0,1 ] - весовые коэффициенты, отражающие отсутствие – 0 – или наличие - ( 0,1 ] - соответствующей компоненты многокомпонентного теста L iuk в модели (4);
nyk e [ 0,1 ] - весовые коэффициенты, отражающие отсутствие - 0 - или наличие - ( 0,1 ] - соответствующей информативной компоненты x ijk ( r ,т ) в модели (4).
Используя (4), можно представить модель (3) следующим образом:
Такое представление модели (3) дает меха- низм адаптации к конкретным задачам за счет комбинирования коэффициентов vi-ux e[0,1], viuy e [0,1], Viuz e [0,1], nijx e [0,1], nijy e [0,1], nijz e [0,1]. Комбинирование значений весовых коэффициентов, принимающих значения из области их определения, позволяет формализовать и в перспективе автоматизировать процесс построения моделей для различных практических приложений [12].
С целью формализации процедуры генерирования моделей введены специальные комбинационные коэффициенты, принимающие значения в соответствии со следующим соглашением [11,13]:
+1, если проекции векторов L i-uk , Xjk совпадают с направлени ем соответ - ствующей оси координат ;
^ iuk , ^ ijk
-1, если проекции векторов L iuk , не совпадают с направлени ем x ijk (6)
соответствующей оси координат , 0, если соответствующая компонента отсутствует
С учетом соглашения (6) модель (5) приобретает вид:
qp
Xix (r ,т )= Z 5 iuxviuxLiux + Z S ijx njjxxijx (r ,т ); u=1
qp
X iy (r,T)= Z 5iuyviuyLiuy + Z Sijy nijyxijy (r,T) ; ” u=1
qp
Xiz (r,T)= Z 5iuzviuz Liuz + Z Sijznijzxijz (r,T) • I u=1
Каждое из уравнений модели (7), являющихся проекциями моделируемой величины на соответствующую координатную ось декартовой систе- мы координат, является моделью перемещения точек объекта в одномерном пространстве.
Полученные модели использованы в процессе оптических измерений информативных составляющих многокомпонентных перемещений на основе метода многомерных тестовых объектов [2,6,11]. Методообразующие признаки метода измерения следующие:
Наличие (возможность сформировать) системы из n уравнений, асимметричных относительно информативных компонентов х 1 k ( r , г ) ,..., х pk ( г , г ) ( k е { x , y , z } - множество координатных составляющих) перемещений соответствующих точек изображения тестового объекта:
Y 1 ( г , г ) = ¥ 1^1 { х 1 k ( г , г ) , ..., х pk ( г , г ) , L 1 k ,..., L qk }} ; '
Y n ( г , г ) = Y n { F p { x 1 k ( г , г ) , ..., х pk ( г , г ) , L 1 k , ..., L qk }} , _
( n > P > 2 ) , (8)
F 1 { x 1 k ( г , г ) , -, х pk ( г , г ) , L 1 k , ..., L qk } * ...:
... ^ F p { x 1 k ( г , г ) ,..., х pk ( г , г ) , L 1 k , ..., L qk } , (9) где Y 1 ( г , г ) ,..., Y n ( г , г ) - функции пере -мещений соответствующих точек изображения контролируемого объекта относительно выбранных(ой) на изображении точек(чки) отсчета; F 1 { х 1 k ( г , г ) ,-, х pk ( г , г ) , L 1 k ,-, L qk } ,..., F p { х 1 k ( г г ) ,..., x pk ( г г ) , L k , — , L qk } - многоком-понентные векторные функции множества составляющих их информативных компонентов х 1 k ( г , г ) ,..., х pk ( г , г ) и компонентов L 1 k ,..., L qk k -й координатной составляющей L k многомерного тестового объекта (многомерного теста) L .
Реализуемость специальных измерительновычислительных алгоритмов:
х 1 k ( г , г ) = f l { y 1 ( г , г X..., Y n ( г , г )} ; '
Очевидно, что при использовании одноканальной оптической системы ее коэффициенты передачи Vi,..., V n одинаковы. Введем коэффициент передачи оптического преобразователя ст. Тогда система уравнений (8) может быть записана в следующем виде:
Y 1 ( г , г ) = r r i F , { х , k ( г , г ) , ..., х pk ( г , г ) , L 1 k , ..., L qk }} ;
Y n ( г , г ) = ct { F p { х 1 k ( г , г ) , ..., х pk ( г , г ) , L 1 k , ..., L qk }} ,
( n > p > 2 ) . (12)
Вид функций связи информативных компонентов х 1 k ( г ,т ) ,..., х pk ( г ,т ) и компонентов L 1 k ,..., L qk k -й координатной составляющей L k многомерного теста L в модели (12) определяется выражением (4).
Используя механизм комбинирования коэффициентов v iux е [ 0,1 ] , v i U y е [ 0,1 ] , vi UZ е [ 0 ,1 ] , n ijx е [ 0,1 ] , n ijy е [ 0,1 ] , n ijz е [ 0,1 ] , соглашение (6), введенное для формирования модели (7), а также соглашение для J i :
+ 1, если проекции векторов Y^ ( г , г )
совпадают с направлени ем соответ - ствующей оси координат ;
- 1, если проекции векторов Y^ ( г , г )
противопол ожны направлени ю соответств ующей оси координат систему уравнений (12) представим в следующей скалярной форме:
f { x , y . z } q { x , y . z } p
Y 1 ( г ) = - Г 1 ст ] S Z ^ 1 uk v 1 uk L uk + X I ? 1 jk n 1 jk x jk ( г )
I ku = 1 k j = 1
f { x , У . z } q { x , y . z } p
Y n ( г ) = -7 n ° ] S S ^ nuk v nuk L uk + S S ^ njk ^ njk x jk ( г )
I ku = 1 k j = 1
( n > p > 2 ) . (14)
^ (10)
х pk ( г , г) = f p { Y 1 ( г , г X ..., Y n ( г , г )} ,
условием существования которых, при непрерывности и дифференцируемости
Y 1 ( г , г ) ,..., Y n ( г , г ) во всем диапазоне измерения, является неравенство нулю Якобиана:
det
d Y i ( г , г ) а х k ( г , г )
* о
г = 1, n , j = 1, p . (11)
Условие (11) обеспечивается реализацией «асимметрии» величин Y ^ ( г , г ) ,..., Y n ( г , г ) относительно составляющих их компонентов х 1 k ( г , г ) ,..., х pk ( г , г ) и L 1 k ,..., L qk , которая выражена неравенством (9).
где Y 1 ( г ) , ..., Yn ( г ) - расстояния от выбранных на чувствительной плоскости приемника изображения точек начала отсчета (меток) до i -х точек изображения контролируемого объекта [2].
Условие (11) существования соответствующих измерительно-вычислительных алгоритмов, получаемых из (14), будет выглядеть следующим образом:
det
d Y(г)
8 xk (г )
^ 0 i = 1, n , j = 1, p .
Решая систему уравнений (14) относительно x 1 k ( г ) ,..., x pk ( г ) , в аналитическом виде получаем соответствующие измерительно-вычислительные алгоритмы:
x к (т ) = f 1 { Y 1 ( т) ..., Y n ( т )} ; '
x pk (т ) = fp { Y 1 ( т ) , ..., Y n ( т )} .
Данные алгоритмы, представленные в виде аналитических выражений, могут содержать знак «-», наличие которого несет информационное содержание, обусловленное принятыми ранее соглашениями (6) и (13). А именно, знак «-» перед значением соответствующей информативной компоненты x jk ( т ) говорит о направлении вектора перемещения, противоположном направлению соответствующей координатной оси.
ТЕСТОВЫЕ ОБЪЕКТЫ И ФОРМИРОВАНИЕ МНОГОКОМПОНЕНТНЫХ ТЕСТОВ
В МОДЕЛЯХ МНОГОКОМПОНЕНТНЫХ ПЕРЕМЕЩЕНИЙ
Вопросы формирования тестовых объектов, их классификация, оптимизация их количества и качества в моделях должны составлять предмет отдельных исследований, поскольку от них зависят и теоретические возможности, и практические применения [14]. Тем не менее, для полноты представления теоретического материала приведем примеры формирования тестовых объектов и использования их параметров при формировании тестов в моделях (5).
Учитывая, что рассматриваемые перемещения являются многомерными, то и тестовые объекты должны являться многомерными. Частным случаем многомерного тестового объекта является одномерный тестовый объект, который показан на рис. 1 в виде отрезка прямой AB .
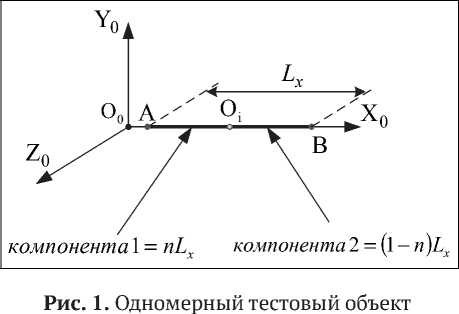
Тестовый объект в виде отрезка AB , показанный на рис. 1, можно рассматривать как одномерный однокомпонентный или как одномерный многокомпонентный.
В первом случае учитывается то, что отрезок AB размещен вдоль оси О 0X0 , проецируется на плоскость О 0 Y 0 Z 0 в точку и имеет один геометрический параметр – длину Lx . Во втором случае во внимание принимаются компоненты АО i = n Lx и O i B = ( 1 - n ) Lx , n e ( 0, 1 ) .
Один из таких объектов, показанный на рис. 1, был использован в процессе решения конкретной задачи определения составляющих многокомпонентных перемещений подвижного объекта [15]. В частности, там параметрами тестового
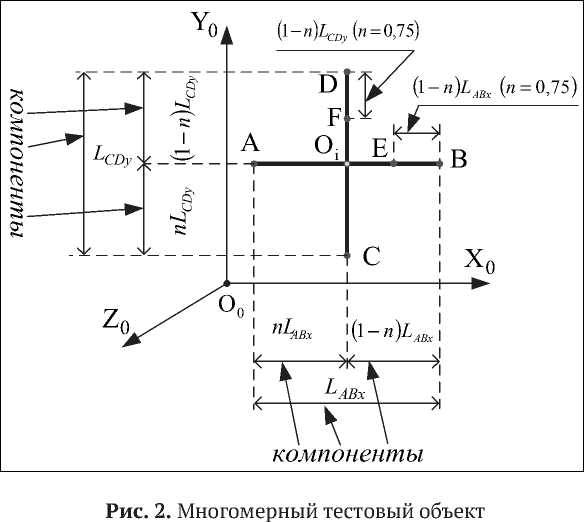
Поскольку общая методика формирования многомерных тестов и функции связи их компонентов с моделируемыми величинами подпадают под основные положения концепции векторных многокомпонентных физических величин, то в общем случае тестовый объект является многомерным, а одномерный и двухмерный (плоский) объекты являются частными случаями. При этом просматривается огромное количество распределенных в пространстве объектов, которые могут рассматриваться в качестве тестовых. Более того, об этом также уместно сказать заранее, что и сам контролируемый объект может рассматриваться при выполнении определенных условий в качестве тестового. Однако формальное конструирование тестового объекта вне связи с вопросами физической реализуемости метода измерения бессмысленно. Поэтому представленные на рис. 1 и рис. 2 объекты являются примерами, несомненно, не исчерпывающими полноту пространства существования тестовых объектов в области существования решаемых данным методом задач.
РЕАЛИЗАЦИЯ МЕТОДА
Как отмечалось в работе [14], представленные основы метода многомерных тестовых объектов являются базой для построения оптических информационно-измерительных систем определения составляющих сложных многокомпонентных перемещений подвижных объектов, позволяя в рамках метода решать некорректную задачу восстановления реальных координат движущегося объекта по его плоскому изображению. Громоздкость рассмотренных моделей и кажущаяся трудоемкость метода обусловлены сложностью и информационной насыщенностью измеряемых перемещений и желанием полностью формализовать процесс поиска соответствующих измерительно-вычислительных алгоритмов.
Для иллюстрации работы метода синтезируем измерительно-вычислительные алгоритмы для оптической измерительной системы определения информативных составляющих перемещений подвижного объекта.
С этой целью рассмотрим графическую модель сложных перемещений подвижного объекта, представленную на рис. 3.
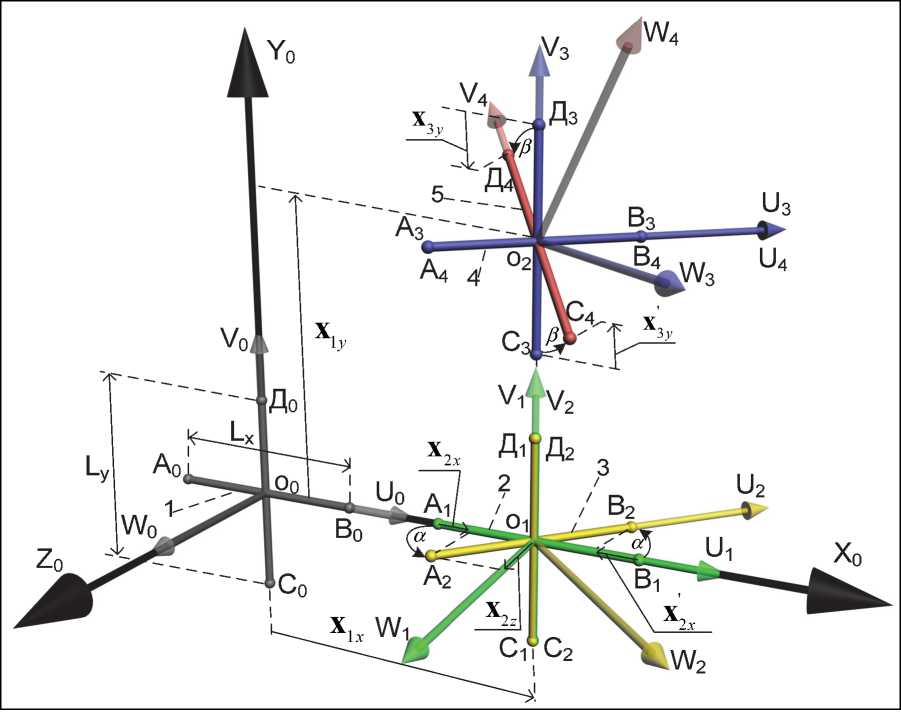
Рис. 3. Графическая модель перемещения тестового объекта ABCД: Lx , Ly – известные параметры тестового объекта; 1, 2, 3, 4, 5 – положения тестового объекта, полученные путем декомпозиции результирующего перемещения; x 1 x , x 2 x , x' 2 x , x 1 y , x 3 y , x' 3 y - информативные компоненты результирующего перемещения тестового объекта
В соответствии с требованиями метода с перемещающимся объектом совмещен многомерный тестовый объект АВСД с известными геометрическими параметрами L x и L y . Осуществляя декомпозицию сложного перемещения объекта ABCД на информативные составляющие, примем следующие обозначения. В начальный момент времени тестовый объект ABCД обозначен А0В0С0Д0 , его центр О о совпадает с началом системы координат { O o ,X q ,Y q ,Z o } , а его стороны А о В о и С о Д о совпадают с координатными осями О 0 X 0 и О 0 Y0 , соответственно. Начальное положение объекта обозначено цифрой 1. В конечном положении, обозначенном цифрой 5, тестовый объект обозначен А4В4С4Д4 . Произведя декомпозицию результирующего перемещения тестового объекта из положения 1 в положение 5 на информативные составляющие, можем перейти к следующему этапу.
Для удобства описания используем присоединенную к тестовому объекту систему координат { О i ,U i,Ni ,W i } . Информативные компоненты результирующего перемещения удобно представить в виде матриц перехода от присоединенной к тестовому объекту системы координат в каждом из положений объекта:
{ О o ,U o ,V o ,W o 1 > - >Ю i ,U i ,V i ,W i } > -- ^ { О 4 ,U 4 ,V 4 ,W 4 } .
Тогда переход тестового объекта ABCД из положения 1 в положение 5 можем представить преобразованием системы координат { О o ,U o ,V o ,W o } в систему координат { О 4 ,U 4 ,V 4 , W 4 } путем:
. перехода из системы координат { О o ,U o ,V o ,W o } в систему координат { О^^, V i , W i } смещением первой в направлении оси О0X0 на величину x 1 x ;
. перехода из системы к о орди -нат { О^^, V i , W i } в систему координат { О 2 ,U 2 ,V 2 ,W 2 } поворотом вокруг оси О^ на угол а ;
. перехода из системы координат { О 2 ,U 2 ,V 2 ,W 2 } в систему координат { О 3 ,U 3 , V 3 W 3 } смещением ее в направлении оси О1V2 на величину x 1 y ;
. перехода из системы координат { G 3 ,U 3 ,V 3 ,W 3 } в систему координат { О 4 ,U 4 ,V 4 ,W 4 } поворотом первой вокруг оси О 2 U 3 на угол р .
Однородные матрицы перехода, описывающие названные перемещения, имеют следующий вид:
|
г 1 |
0 |
0 |
x i x |
|
|
0 |
1 |
0 |
0 |
|
|
Т У 0 , x i x = |
0 |
0 |
1 |
0 |
|
. 0 |
0 |
0 |
i _ |
|
cos а |
0 |
sin а |
0 " |
|
|
0 |
1 |
0 |
0 |
|
|
T V i , а = |
- sin а |
0 |
cos а |
0 |
|
. 0 |
0 |
0 |
i _ |
100 0
|
Ty = T V 2, x i у |
0 0 |
1 0 |
0 1 |
x i у 0 |
|
0 |
0 |
0 |
i |
|
г , |
0 |
0 |
0 " |
|
|
T y 3 , в = |
0 |
cos в |
sin в |
0 |
|
0 |
- sin в |
cos в |
0 |
|
|
. 0 |
0 |
0 |
i _ |
Матрица (17) описывает компоненту, характеризующую поступательное перемещение объекта в направлении оси О 0 X 0 (вектор перемещения x 1 x ). Матрица (18) описывает компоненту, характеризующую поворот объекта вокруг оси
О^ (угол поворота а ).Матрица(19) описывает компоненту, характеризующую поступательное перемещение объекта в направлении оси О 0 X 0 (вектор перемещения х , у ). Матрица (20) описывает компоненту, характеризующую поворот объекта вокруг оси О 2 U 3 (угол поворота в ).
Соответственно, однородная матрица композиции преобразований, описывающая результирующее перемещение объекта АВСД из положения 1 в положение 5, имеет вид:
T 5
= Т У о , x x 1 T V,а T V 2 , x i у Т У 3 , в ,
где каждая из матриц перехода несет информацию о соответствующих информативных составляющих сложного перемещения объекта АВСД.
В общем случае перемещающийся объект имеет шесть степеней свободы. Следовательно, в однородной матрице композиции преоб-разований будет представлено шесть матриц перехода в каждом такте измерения. Например:
i T 7 = Т у 0 , x , x T V^ T V,. . . у Т у 3 , e T W 4 , -x iz T W^
Переходя от реального объекта АВСД к его изображению в системе машинного зрения, мы переходим от пространственных координат точек ( X, Y, Z ) контролируемого объекта к их двухмерным изображениям, где для обозначения координат пикселя используется сокращенная запись ( x , у ) .
Рассмотрим задачу определения информативных компонентов, описанных однородной матрицей композиции преобразований (21) для перемещения объекта АВСД из положения 1 в положение 5, как показано на рис. 3. В соответствии с принятыми обозначениями векторы x 1 x и x 1 y , характеризующие линейные перемещения соответствующих точек объекта АВСД в направлениях осей координат О0X0 и О1V2 , отображаются непосредственно на плоскость x , у изображения видеокамеры. Векторы x 2 x , x ' 2 x и x 3 y , x 3 y , отображаемые на плоскость изображения видеокамеры, характеризуют перемещения соответствующих точек контролируемого объекта АВСД вследствие его поворота вокруг осей O 1 V 1 и О 2 U 3 на углы а и р . Поскольку параметры L x и L y тестового объекта АВСД известны, то переход от векторов x 2 x , x 2 x и x 3 y , x 3 y к углам а и в является тривиальной задачей и не рассматривается.
Приведенное (дважды инвертированное изображение) отображение последовательности соответствующих промежуточных положений ( a o b o c oдо, a1b1C1 g 1 , a 2 b 2C2д2, а3Ь3С3Д3 , a4b4c4д4 ) контролируемого объекта АВСД на плоскость изображения камеры показано на рис. 4.
Согласно положениям метода измерения в определенных точках плоскости изображения закрепляются виртуальные метки, связанные с системой координат x , y камеры, относительно которых и определяются результирующие перемещения точек контролируемого объекта. В данном случае метками являются точки M 1 ,
M 2 , M 3 , расположенные на соответствующих координатных осях камеры. В начальный момент времени положение метки M 1 совпадает с положением точки ао, положение метки M 2 совпадает с положением точки о 0 , положение метки M 3 совпадает с положением точки b 0 .
На рис. 4 показаны также векторы о х ^ x , о x 2 x , о х 2 x , ° x 1 у , ° x 3 у , ст х з у , являющиеся изображениями проекций информативных составляющих перемещений соответствующих точек контролируемого объекта. В данном случае, исходя из соображений симметрии, 1 ° x 2 x I = ° x 2 x I и ° x 3 у | = ° x 3 у . В общем случае последние равенства могут не выполняться.
В соответствии с (14) запишем систему уравнений:
-
Y 1 x = -о ( x 1 x + x 2 x );
-
Y 2 x = ° ( - L x /2 + x 1 x );
-
Y 3 x =- о ( L x + xx 1 - x 2 x )
-
Y 4 у =—° ( x 1 у );
Y 5 у = -о (Ly /2 + x 1 у - x 3 у ),
где Y 1 x , Y 2 x , Y 3 x , Y 4 у , Y 5 у — изображения многокомпонентных перемещений соответствующих точек контролируемого объекта АВСД, которые записаны в соответствии с представленными в методе формальными моделями.
Они отсчитываются в соответствующий такт измерения от меток M ^, M 2 и M 3 в направлениях, показанных на рис. 4 стрелками; L – приведенная к скалярной модели компонента многомерного теста L .
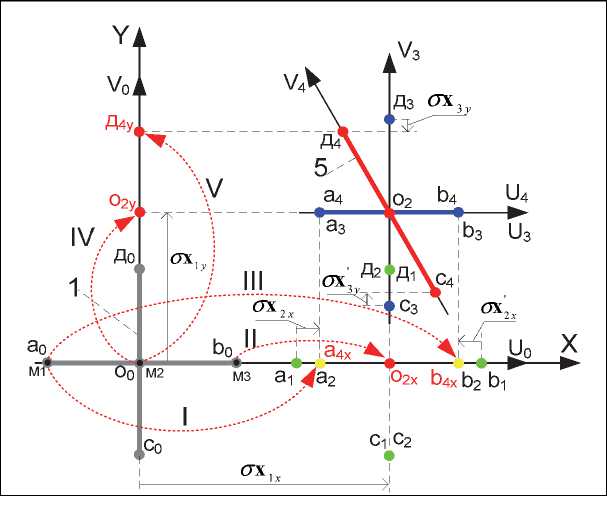
Рис. 4. Дважды инвертированное изображение adcд объекта АВСД, фиксируемое видеокамерой и отображающее последовательность положений изображения контролируемого объекта
В соответствии с (15) определим Якобиан Ja = 274 L для системы уравнений (22): x. По скольку для оптического преобразователя 7 * 0, а Lx * 0 и Ly * 0 (последние являются известными параметрами многомерного тестового объекта), то Ja = 274Lx * 0, и система уравнений (22) разрешима относительно информативных компонентов x1x , x2x, x1y, x3y .
Решая систему уравнений (22) относительно x 1 x , x 2 x , x 1 y , x 3 y , получаем измерительновычислительные алгоритмы для определения указанных информативных составляющих сложного перемещения объекта АВСД, которые описаны однородной матрицей композиции преобразований (21) и отображены на графической модели (рис. 3):
= _ Lx ( 2Y 2 x - Y 1 x - Y 3 x )
x ;
-
1 x 2 ( 2 Y 2 x + Y i x + Y 3x )
x = L x ( 2 Y 2 x + 3 Y 1 x — Y 3 x ) ;
-
2 x 2 ( 2 Y 2 x + Y i x + Y 3 x ) ;
-
= 2 Y 4 yL,
-
x 1 y 2 Y 2 x + Y i x + Y 3 x ’
-
= L y - 2 L x Y 5 y — Y 4 y )
-
x 3 y 2 2 Y 2 x + Y ix + Y 3x '
Данные алгоритмы после программной реализации в структуре измерительной системы завершают процесс создания оптической ИИС для определения информативных составляющих сложных перемещений подвижного объекта, отвечающих модели (3).
Как следует из формального аппарата комбинирования коэффициентов v ius , ^ ijs , ^ tus , ^ ijs и показателей p и q в системе уравнений (14), представленная реализация не единственная. Количество вариантов и их вид определяются в процессе решения конкретной задачи и зависят как от числа информативных компонентов, подлежащих определению, так и от критерия качества, формируемого в процессе постановки решаемой задачи.
Комбинационный аппарат формального синтеза систем уравнений вида (14) для использования в ИИС многокомпонентных физических величин перспективен еще и потому, что позволяет осуществлять автоматизированный поиск множества вариантов, приемлемых как с точки зрения физической реализуемости, так и исходя из потребностей конкретных технических применений.
Список литературы Математическое моделирование многокомпонентных перемещений и оптический метод их измерения
- Вибрации в технике: Справочник. В 6-ти т. . М.: Машиностроение, 1980. Т.3. Колебания машин, конструкций и их элементов . 1980. 544 с.
- Нестеров В.Н., Мухин В.М., Мещанов А.В. Метод многомерных тестовых объектов в оптических измерительных системах . Самара: Изд-во СНЦ РАН, 2013. 224 с.
- Нестеров В.Н. Алгоритмический метод повышения информативности измерений//Метрология. 1995. № 1. С.3-15.
- Нестеров В.Н. Методы и средства инвариантных измерений составляющих многокомпонентных физических величин: Автореф. дис. … докт. техн. наук. Самара: СамГТУ, 1996.
- Нестеров В.Н. Теоретические основы измерений составляющих векторных многокомпонентных физических величин//Датчики и преобразователи информации систем измерения, контроля и управления: Сборник материалов ХIII Н.-т. конф. с участием зарубежных специалистов . М.: МГИЭМ. 2001. С.175-177.
- Нестеров В.Н. Принципы измерений векторных многокомпонентных физических величин//Информационно-измерительные и управляющие системы. 2003. №2-3. С.92-98.
- Нестеров В.Н. Теоретические основы измерений составляющих векторных многокомпонентных физических величин//Труды III международной конференции «Идентификация систем и задачи управления». М.: ИПУ им. В.А. Трапезникова РАН. 2004. С.1691-1700.
- Фу К., Гонсалес Р., Ли. К. Робототехника. М.: Мир. 1989. 624 с.
- Нестеров В.Н., Жеребятьев К.В. Математическое моделирование шестизвенного манипулятора универсального промышленного робота. Прямая кинематическая задача для робота ПР125//Вестник Самарского государственного технического университета. 2005. Вып. №32. С.19-28.
- Нестеров В.Н. Теоретические основы измерений составляющих векторных многокомпонентных физических величин//Измерительная техника. 2004. №7. C.12-16.
- Нестеров В.Н., Мещанов А.В. Математические модели векторных многокомпонентных физических величин и метод многомерных тестов в оптических измерительных системах//Измерительная техника. 2006. №12. C.10-13.
- Нестеров В.Н., Жмуров Д.Б. Формальный синтез информационно-измерительных систем многокомпонентных физических величин//Измерительная техника. 2007. №9. C.3-6.
- Нестеров В.Н., Мещанов А.В. Теоретические основы оптических измерений составляющих многокомпонентных перемещений подвижных объектов на базе метода многомерных тестов//Измерительная техника. 2007. №11. С.3-9.
- Нестеров Д.В., Нестеров В.Н., Мухин В.М. Построение математических моделей с целью расширения класса тестовых объектов в рамках метода многомерных тестов//Авиакосмическое приборостроение. 2015. №10. С.53-63.
- Нестеров В.Н., Мещанов А.В., Мухин В.М. Способ измерения компонентов сложных перемещений объекта: Пат.2315948 (РФ). 2008.
