Математическое моделирование переходного процесса в выходной цепи управляемого электрохимического сопротивления

Автор: Герасименко Юрий Яковлевич, Скакунова Татьяна Павловна, Герасименко Евгений Юрьевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 2-2 (63) т.12, 2012 года.
Бесплатный доступ
Рассматривается и решается задача получения аналитической зависимости выходной величины управляемого электрохимического сопротивления (УЭХС) от тока управления, а также выполнено математическое моделирование переходного процесса в выходной цепи УЭХС, содержащей линейную индуктивность или линейную электрическую ёмкость.
Плотность электрического тока, электрохимическое осаждение металла, электрическое сопротивление, проводимость, переходной процесс, индуктивность, дифференциальное уравнение
Короткий адрес: https://sciup.org/14249813
IDR: 14249813 | УДК: 519.63(075.8)
Mathematical simulation of transition in output circuit of controllable electrochemical resistance
The problem of getting the analytical dependence of the output value of the controllable electrochemical resistance (CER) on the control current is considered and solved. The mathematical simulation of the transient process in the CER output circuit involving linear inductance or linear permittance is carried out, too.
Текст научной статьи Математическое моделирование переходного процесса в выходной цепи управляемого электрохимического сопротивления
Введение. УЭХС представляет собой цилиндрический проводник длиною / прямоугольного сечения (подложка) a х r , изготовленный из стеклографита. Если на боковую поверхность УЭХС наносить электрохимическим способом тонкий слой металла, то сечение слоёного проводника будет увеличиваться, а его сопротивление уменьшаться. Ставится задача получить зависимость выходной величины УЭХС от тока (плотности тока) в цепи управления (рис. 1).
Вывод зависимости R ( t ) от тока управления. Пусть р п и р м — удельные электрические сопротивления материалов подложки и наносимого осадка металла, Sп и Sм ( x ) — поперечные сечения подложки и осаждённого металла, dRп — элемент электрохимического сопротивления подложки длиною dx , dRм — элемент электрического сопротивления осаждённого металла дли-
|
ною dx . Тогда |
р„ dx dRn = П , (1) Sп р dx dR = мл . м S м ( x ) (2) |
Параллельное включение этих элементов приводит к такому эквиваленту
|
dR ■ dR dR =--- п-----«. . dR n + dR » |
Подставим (1) и (2) в (3)
P n dx р M dx р n р м
------------------------ ■----------------------------- ------------- ■ ----------------------------- dR = -S---SM (x) = Sn SM (x) dx =----------dx. (4)
P n dx , p M dx P n , P м P п 5 м ( x) + P м5п
S п S м ( x ) S п S м ( x )
Как видно из полученной формулы, дальнейшее исследование сводится к получению зависимости S м ( x ).
Пусть δ(x;t) — известное пространственно-временное распределение плотности элек- трического тока на управляющем электроде. Тогда 5(x;t) ■ a ■ dx — ток управления в момент t
t через площадку a ■ dx . J 5(x; t)a ■ dx ■ dt — заряд, прошедший через площадку a ■ dx за отрезок 0
времени [ 0; t ] .
Если к — электрохимический эквивалент осаждаемого металла, то [ 1 ]
t dm = кJs(x; t)a ■ dx ■ dt — масса осаждённого металла на площадке a ■ dx , за отрезок времени 0
[ °: t ] .
k [ 5 ( x ; t)a ■ dx ■ dt
—
Если ум — объёмная плотность осаждённого металла, то dVM = — = —------------- Y м Y м объём осаждённого металла на площадке a ■ dx за отрезок времени [0; t].
Считая форму осаждённого металла на поверхности бесконечно малой площади a ■ dx в виде параллепипеда, можно найти площадь поперечного сечения Sм ( x ) в точке x :
t ka J5(x;t )dt
.
Sm (x) = V, или Sm (x) = -------- dx Y м
Подставим (5) в (4)
dR =---- t--^------- dx .
ka J s ( x ; t )dt (6)
P n —-------- + P м ■ Sn
Y м
Выходная величина УЭХС легко может быть рассчитана с помощью интегрирования выражения (6) по x :
R(t ) = J------ t---------------- dx .
° ka J 5 ( x ; t )dt (7)
P n —-------- + P м ■ Sn
Y м
Полученная формула (7) может быть использована при произвольном распределении плотности тока 5 ( x ; t ) в цепи управляющего электрода, в том числе и при равномерном, когда
5 ( x ; t ) =
I y ( t )
У ■ a '
где Iy ( t ) — ток управления.
Подставляя (8) в (7) получаем
R(t) =-----1 P п Р мм-------- k J Iy (t )dt
Р п Y . £ + Р MSn
м
При постоянном токе управления I y (t ) = I o = const формула (9) ещё более упрощается:
Р п Р м*
kIt е
Р п 7 + P M S n
Y М £
Зависимость R ( t ) в соответствии с формулой (10) принимает гиперболический характер (рис. 2).
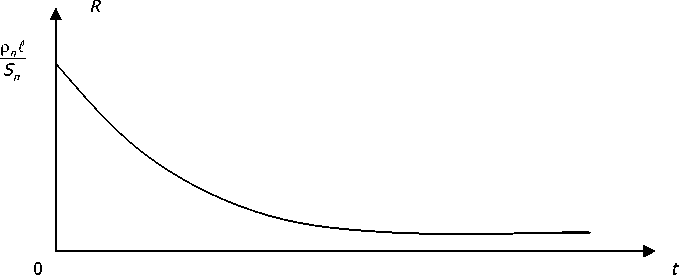
Рис. 2. Зависимость R (t) от времени при Iy(t ) = I, = const
Далее при расчётах переходных процессов в схемах, содержащих УЭХС, будем считать, что распределение плотности тока в цепи управляющего электрода является равномерным, т. е. будет использоваться формула (9).
Математическое моделирование переходных процессов. Второй закон Кирхгофа для приведённой на рис. 3 схемы имеет вид
i(t)R(t ) + i(t)R„ + L „ dit = E „ . dt
Разрешая уравнение (11) относительно производной, получаем di E о - i ( t ) ( R ( t ) + R o ) dt= '
По первому закону коммутации для данной цепи [ 2 ] i (0 - 0) = i (0 + 0) = 0, т. е.
i (0) = 0
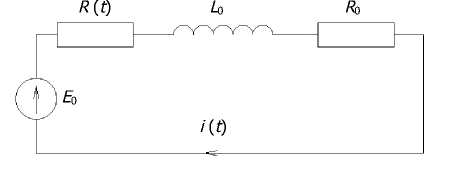
Рис. 3. Включение R ( t ) с активно-индуктивной нагрузкой
Задача коши (12), (13) легко может быть решена численно одним из известных методов, например, методом Эйлера.
Введём в рассмотрение функцию
f (R (t); i (t ))*
e о - i ( t ) ( R ( t ) + R )
L 0
Пусть tmax — время переходного процесса, n — количество дискретных временных точек переходного процесса. Тогда временной шаг определяется соотношением h = tmax. (15)
n
Итерационная формула Эйлера для массива тока {ij ;j = 0, n} имеет вид ij+1 = ij + hf (Rj; ij), (16)
где R j = R ( t j ) , i j = i ( t j ) .
Алгоритм расчёта переходного процесса в схеме, изображённой на рис. 3, можно представить следующей блок-схемой (рис. 4).
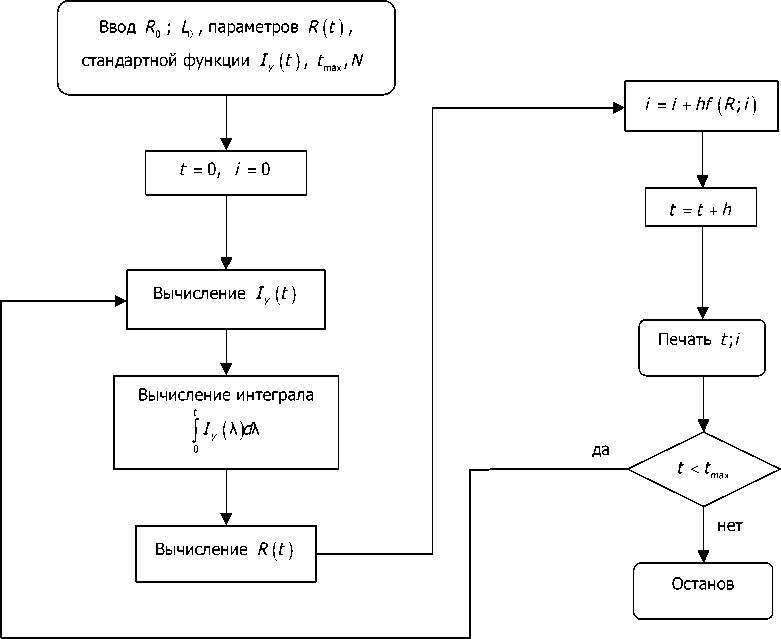
Рис. 4. Алгоритм расчёта переходного процесса в цепи R ( t ) - R 0 - L
При исходных данных E о = 2 B ; р п = 8 ■ 10 - 5 Ом ■ м ; Sn = 10 ■ 10 - 6 м 2 ; р м = 1,72 ■ 10 — 8 Ом ■ м ; к = 0,6588 ■ 10 - 6 кг / Кл; I = 0,10 м ; I о = 0,1 Л ; у м = 8,9 ■ 10 3 кг / м 3 ; R o = 5 Ом ; L = 0,1гн была рассчитана зависимость i ( t ) , представленная на рис. 5.
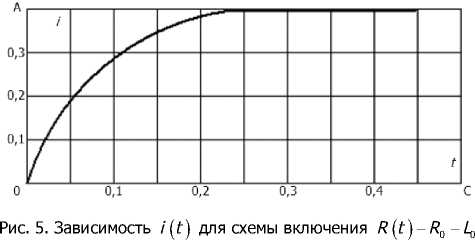
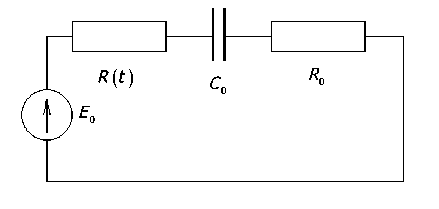
Рис. 6. Включение R ( t ) с активно-ёмкостной нагрузкой
Второй закон Кирхгофа для приведённой на рис. 6 схемы имеет вид
t i (t)R (t) + i (t)R + -1 Ji (t)dt = Eo. (17)
с 0 0
Для получения дифференциального уравнения относительно i ( t ) продифференцируем (17) по t .
di dR ( t ) di 1
— R ( t ) + i ( t )—— + R — + — i ( t ), dt dt ° dt С
O откуда
±+dR (t)
di С 0 dt
dt ( t ) R ( t ) + R 0 '
где
dR ( t )
dt определяется при дифференцировании (9).
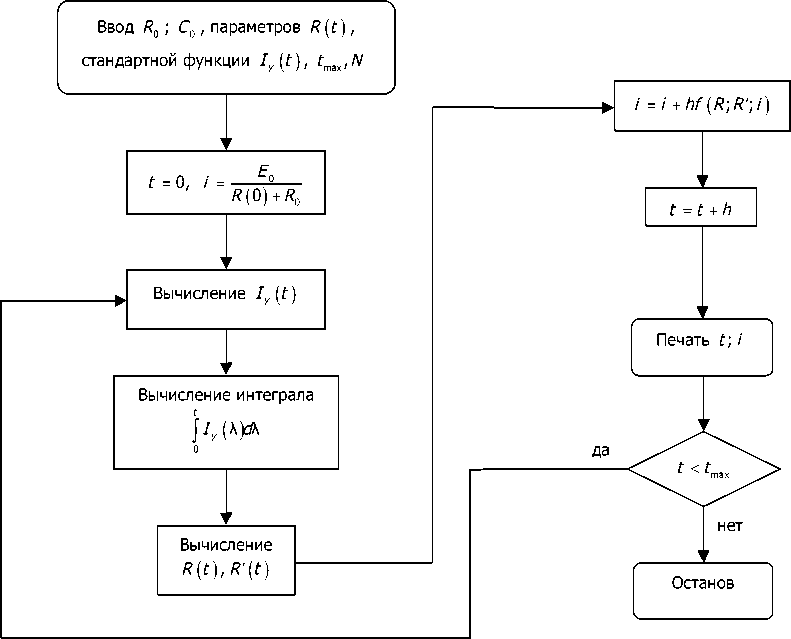
Рис. 7. Алгоритм расчёта переходного процесса в цепи R ( t ) - R 0 - С 0
р П р мк
dR dt
—
Y м
Iy (t )
г. t .
| P4j l y ( t ) dt + P m S „ I y
V Y м о 7
По второму закону для схемы на рис. 6 можно записать
U c 0 ( 0 — 0 ) = U c 0 ( 0 + 0 ) = 0, откуда получаем при t = ( 0 + 0 )
i (0)R (0) + i (0)Ro = Eo, т. е.
i (0) = —E---.
( ) R (0) + Ro
Таким образом, расчёт переходного процесса для i ( t ) в схеме на рис. 6 сводится к решению задачи Коши (18), (20).
Введём в рассмотрение функцию f IR (t); dR; i (t T—i (t)
±+dR (t)
C 0 dt
R ( t ) + R o .
Итерационная формула Эйлера для массива тока {ij; j = 0, n} имеет вид ij. = ij + h (Rj; Rj; ij), где
R j = R ( t j ) - i j = i ( t j ) , Rj =
dR ( t j )
dt
.
Алгоритм расчёта переходного процесса в схеме, изображённой на рис. 6, можно представить следующей блок-схемой (рис. 7).
При E o = 2B;R o = 5Ом; С_ = 0,005 ф была рассчитана зависимость тока i ( t ) (рис. 8) в схеме, представленной на рис. 6.
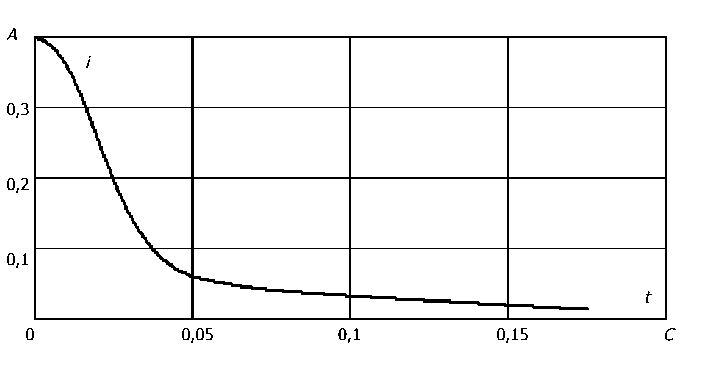
Рис. 8. Зависимость тока i ( t ) для схемы включения R ( t ) — R 0 — С 0
Заключение. Полученная математическая модель УЭХС успешно может быть использована для расчёта переходных процессов в линейных и нелинейных схемах, содержащих этот элемент. В большинстве случаев, даже для линейных схем, эта задача решается только численно.
Список литературы Математическое моделирование переходного процесса в выходной цепи управляемого электрохимического сопротивления
- Дамаскин, Б. Б. Электрохимия/Б. Б. Дамаскин, О. А. Петрий. -Москва: Высшая школа, 1987. -296 с.
- Нейман, Л. Р. Теоретические основы электротехники. Т. 1/Л. Р. Нейман, К. С. Демирчян. -Ленинград: Энергоиздат, 1981. -535 с.
