Математическое моделирование силового взаимодействия щеток коммунальных машин с дорожным покрытием

Автор: Лепеш Алексей Григорьевич, Лепеш Григорий Васильевич
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Методические основы совершенствования проектирования и производства технических систем
Статья в выпуске: 3 (13), 2010 года.
Бесплатный доступ
Разработана математическая модель силового взаимодействия щеток коммунальных машин с дорожным покрытием. Установлена зависимость характеристик силового взаимодействия от условий контакта. Разработан и реализован на ЭВМ алгоритм расчета характеристик силового взаимодействия щеточного ворса с дорожным покрытием. Разработано теоретическое обеспечение методики оценки функционирования щеток коммунальной уборочной техники в различных условиях их эксплуатации.
Щетки коммунальных машин, силовое взаимодействие, дорожное покрытие, математическая модель, изгиб, оценка функционирования
Короткий адрес: https://sciup.org/148185864
IDR: 148185864 | УДК: 625.768.1
Текст научной статьи Математическое моделирование силового взаимодействия щеток коммунальных машин с дорожным покрытием
При взаимодействии цилиндрической щетки с дорожным покрытием ее ворс изгибается упруго, а затем распрямляется, преодолевая силы трении, и совершает свободные колебания. Колебания, возникающие в этих условиях, носят название автоколебаний. В первой стадии процесса автоколебаний происходит подбрасывание твердых частиц загрязнений над поверхностью покрытия силами упругости ворса и последующее засасывание их воздуховсасывающим агрегатом коммунальной уборочной машины, либо удаление их специальным транспортером.
Эффективность процесса уборки при этом зависит от процесса силового взаимодействия ворса щетки с дорожным покрытием, которые определяются свойствами покрытия и ворса (геометрическими и механическими), характеристиками контактного взаимодействия (скоростью скольжения, частотой вра- щения щетки, величиной деформации каждой ворсины, находящейся в условиях контактного взаимодействия).
Геометрические характеристики ворса [1] определяются условиями их установки на подметальные машины и условиями эксплуатации щетки в зимнее и летнее время. Так для пластмассовой (полипропиленовой щетки) из условий эксплуатации подобраны для летнего времени средняя толщина ворса 1,5 – 2,3 мм, а для зимнего – толщина 2,8 ÷ 3,2 мм. Это обусловлено тем, что производительность процесса при уборке снега, как правило, требуется большая, чем при подметании дорожного покрытия в летнее время. Хотя исключением может быть уборка мусора при проведении строительных работ, где применяют щетки с толщиной ворса 4 и более миллиметров.
Условия установки щетки на подметальную машину определяют диаметр подметального диска цилиндрической щетки (определяется дорожным просветом автомобиля) и ее длину (определяется шириной автомобиля). Так оптимальными для установки на большинство автомобилей отечественного и импортного производства на сегодняшний день опре- делены щетки наружным диаметром D =550 мм. Такая щетка [1] имеет ступицу диаметром d = 180 мм и набирается на вал, диаметром dB =78 мм.
Как правило, щетку набирают из ворса, который имеет овальное попереч- ное сечение и некоторую волнистость по длине. Эти особенности геометрии получаются в процессе изготовления методом экструзии при взаимодействии со специальными валками и предназначены способствовать процессу подметания за счет оптимизации продольной и поперечной упругости щеточного ворса. Т.е. – снижения продольной и увеличения поперечной жесткости (рис.1).

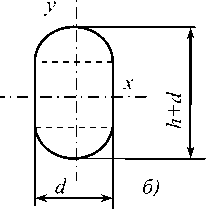
Рисунок 1 – Геометрия щеточного ворса: а) – продольная волнистость; б) – поперечное сечение
Скорость скольжения ворса по дорожному покрытию определяется [1] cкоростью движения автомобиля ^авт в зимнее и летнее время, которые в среднем составляют 13 и 6 км/час соответственно, а также частотой вращения вала щетки современных машин, которая достигает n = 270 ÷ 300 об\мин. При этом средняя линейная скорость скольжения ворса будет достигать величины Vc =11.8 м\с зимой и vc =9.8 м\с в летнее время при значении ее наружного диаметра D=550 мм.
Величину деформации каждой ворсины, находящейся в условиях контактного взаимодействия будет опреде- лять в первую очередь вертикальное смещение оси щетки относительно точки касания его с дорожным покрытием 5.
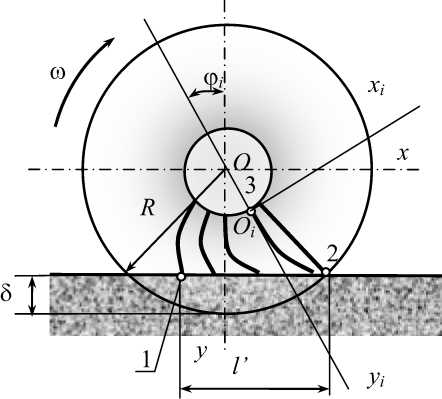
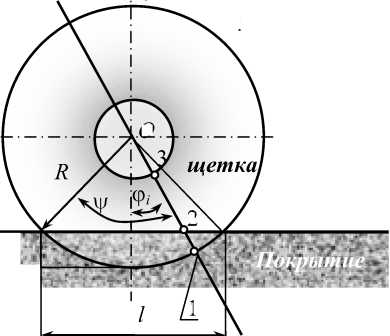
Зависимость между длиной контакта цилиндрической щетки и смещением 5 можно определить исходя из простых геометрических соотношений, определенных в системе координат xOy (рис.2).
Iy x2+ y2 R2i=0
x y=tg(90+Ф i)
*■ ■>
О
Рисунок 2 – Схема взаимодействия щетки с дорожным покрытием
x2 + у2 — 7?2 = 0; . у = —R + 5;
Z2 = 2V2R5 - S2, или 8 = R - 7«2 -0,25Z2. (2)
Рассчитанные по зависимости (2) значения граничных условий для применяемых размеров щеток [1] сведены в табл.1. На рис.3. приведены графики этих соотношений.
Радиальное смещение каждой i-той ворсины также определим из геометрии контакта как расстояние между точками 1 и 2 (рис.2). Тогда из условий пе- ресечения функций для координат точек 1 и 2 имеем соответственно:
(У1 = tg(90 + (pi)^;
I x\ + yX - R2 = 0 и
[У2 = tg(90 + 4>t)x2;
l У2 = ~R + 5,
R2
откуда : хг = /----;— = R sin (0;;
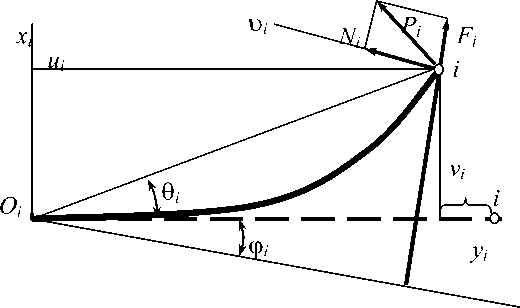
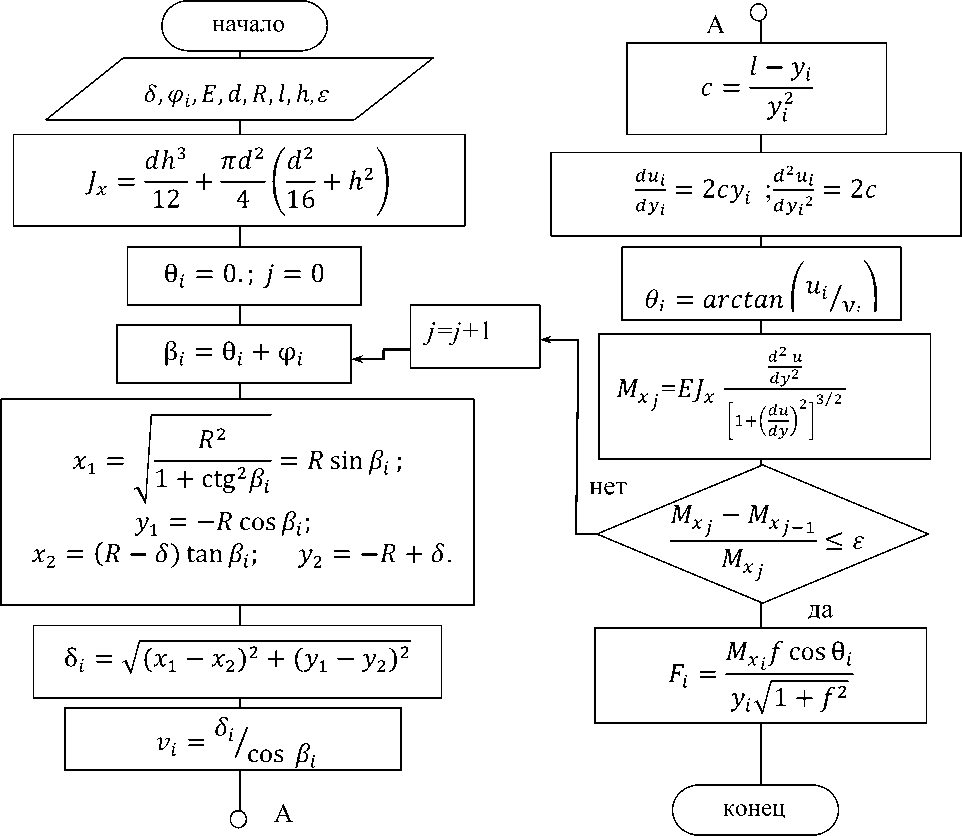
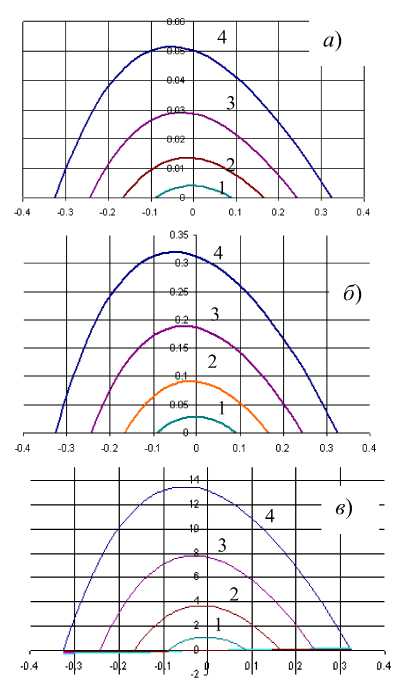
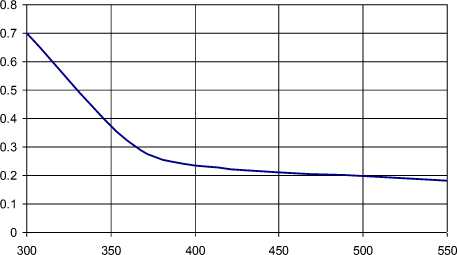
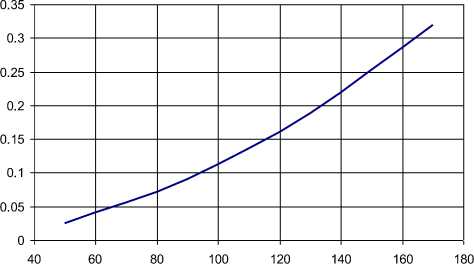
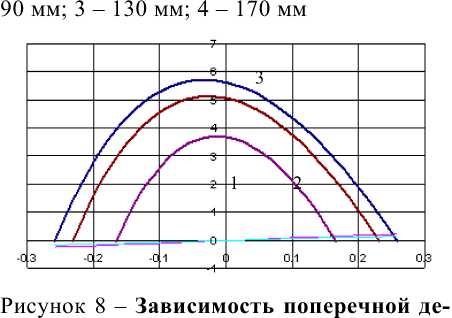
J 1 ^l+ctg2 У1 = —R cos (pi; x2 = (R -5)tan Таблица 1 – Зависимость глубины от ширины пятна контакта Радиус щетки Ширина пятна касания 175 200 275 350 375 400 450 457,5 10,0 0,0714 0,0625 0,04546 0,03572 0,03333 0,03125 0,02778 0,02732 20,0 0,2859 0,2501 0,18188 0,14289 0,13336 0,12502 0,11112 0,1093 30,0 0,6440 0,5632 0,40940 0,32158 0,30012 0,28135 0,25007 0,24597 40,0 1,1466 1,0025 0,72824 0,5719 0,53371 0,50031 0,44466 0,43737 50,0 1,7949 1,5686 1,13872 0,894 0,83426 0,78201 0,69498 0,68357 60,0 2,5906 2,262 1,64126 1,28808 1,20193 1,12659 1,00111 0,98467 70,0 3,5357 3,0863 2,23637 1,7544 1,63691 1,53419 1,36318 1,34076 80,0 4,6327 4,0408 2,92464 2,29323 2,13944 2,00503 1,7813 1,75199 90,0 5,8846 5,1282 3,70680 2,90491 2,70979 2,53931 2,25565 2,21849 100,0 7,2949 6,3508 4,58365 3,58984 3,34828 3,1373 2,7864 2,74045 110,0 8,8675 7,7111 5,55613 4,34844 4,05526 3,79929 3,37376 3,31804 120,0 10,607 9,2121 6,62526 5,18121 4,83112 4,5256 4,01794 3,95149 130,0 12,519 10,857 7,79222 6,08867 5,67629 5,31658 4,71919 4,64103 140,0 14,609 12,650 9,05828 7,07144 6,59126 6,17263 5,47778 5,38691 150,0 16,886 14,595 10,42487 8,13014 7,57654 7,09416 6,29402 6,18941 160,0 19,356 16,696 11,89356 9,2655 8,6327 8,08164 7,1682 7,04884 170,0 22,029 18,961 13,46606 10,47828 9,76035 9,13557 8,10069 7,96552 180,0 24,916 21,394 15,14427 11,76931 10,96017 10,25649 9,09185 8,9398 190,0 90 -1 28,030 24,002 16,93024 13,13949 31,385 26,794 18,82623 14,5898 35 29,779 20,83470 16,12128 38,893 32,967 22,95834 17,73505 43,090 36,369 25,20008 19,43231 / 350 47,622 40 27,56314 21,21436 52,525 43,875 30,05103 23,08258 57,846 48,013 32,66758 25,03846 63,644 52,436 35,41703 27,0836 70 57171 3830399 292197 нок 3 - Зависимость глубины от ины пятна контакта l 12,23286 11,44498 10,14207 9,97207 200,00 80-U 13,57919 12,70167 11,25178 11,06271 210,0 15 14,0272 12,42144 12,21217 220,0 ________________________ 50 16,49616 15,42231 13,65152 13,4209 230,0 40 J— 18,06863 16,88774 14,94253 14,68937 240,0 30 J— 19,71842 18,42432 16,29503 16,01812 250,0 20 J— 21,44661 20,0329 17,70959 17,40768 260,0 10 1— 23,25435 21,71439 19,18682 18,85863 270,0 25,14289 23,46979 20,72736 20,37159 280,0 27,11352 25,30012 22,3319 21,94719 290,0 Рису 29,16767 27,20649 24,00117 23,58613 300,0 шир 31,30682 29,19008 25,73593 25,28911 Тогда искомое расстояние 5t определим как радикал от разности квадратов координат точек 1 и 2 §i = 7(^Г-^2)Г+7уГ-У2р. (3) Значения граничных условий 5[ для щеток диаметром D=550 мм приведены в табл. 2. Таблица 2 – Граничные условия 5i для щеток диаметром D=550 мм Ширина пятна контакта Фi 20 40 60 800 100 120 140 160 180 0.0 0.1818 0.728 1.6413 2.9246 4.5837 6.6253 9.0583 11.8936 15.1443 0.01 0.1681 0.7145 1.6276 2.9110 4.5701 6.6118 9.0450 11.8804 15.1313 0.02 0.1269 0.6733 1.5866 2.8702 4.5296 6.5716 9.0051 11.8409 15.0923 0.03 0.0582 0.6048 1.5183 2.8022 4.4620 6.5045 8.9386 11.7752 15.0274 0.04 0.0378 0.5089 1.4227 2.7071 4.3674 6.4106 8.8456 11.6832 14.9365 0.05 0.3856 1.2998 2.5848 4.2458 6.2900 8.7261 11.5649 14.8197 0.06 0.2349 1.1497 2.4353 4.0973 6.1426 8.5800 11.4204 14.6770 0.07 0.0570 0.9724 2.2589 3.9219 5.9685 8.4075 11.2497 14.5084 0.08 0.7679 2.0554 3.7197 5.7678 8.2086 11.0530 14.3141 0.09 0.5364 1.8250 3.4907 5.5405 7.9834 10.8301 14.0940 0.10 0.2779 1.5677 3.2349 5.2867 7.7319 10.5813 13.8482 0.11 0.0076 1.2835 2.9526 5.0065 7.4542 10.3065 13.5769 0.12 0.9727 2.6436 4.6999 7.1503 10.0060 13.2800 0.13 0.6352 2.3082 4.3670 6.8205 9.6796 12.9577 0.14 0.2712 1.9464 4.0080 6.4647 9.3276 12.6100 0.15 0.1192 1.5584 3.6228 6.0831 8.9501 12.2372 0.16 1.1442 3.2118 5.6757 8.5471 11.8391 0.17 0.7040 2.7749 5.2428 8.1187 11.4161 0.18 0.2378 2.3122 4.7844 7.6652 10.9682 0.19 1.8240 4.3006 7.1866 10.4955 0.20 16 14 12 10 8 6 4 2 0 n 1.3104 3.7916 6.6830 9.9981 180 мм 4 0.21 0.7714 3.2575 6.1546 9.4763 0.22 160 мм 0.2073 2.6985 5.6016 8.9301 0.23 140 мм 2.1148 5.0241 8.3597 0.24 120 мм 1.5064 4.4222 7.7652 0.25 0.8735 3.7961 7.1468 100 мм 0.26 0.2164 3.1460 6.5048 0.27 2.4720 5.8391 80 мм 0.28 2.4720 5.1501 0.29 60 мм 1.7744 4.4379 0.30 40 мм 1.0532 3.7027 0.31 0 0. 05 0. 1 0. 15 0. 2 0. 25 0. 20 мм 3 0. 35 0. 0.3088 2.9446 0.32 2.1639 0.33 Рисунок 4 – Изменение 8^ от угла Фi и ширины контакта 1.3607 0.34 0.5353 График изменения 5^ в пределах угла перекрытия V (рис.2), где V = 2arctg , приведен на рис. 4. Математическую модель процесса силового взаимодействия ворсины щетки при уже определенных граничных условиях будем строить исходя из допущений, что деформация (изгиб) происходит под действием сосредоточенной силы, приложенной к концу ворсины в зоне ее контакта с дорожным покрытием. Величину этой силы составляют сила трения Fтр и сила нормального взаимодействия N. При этом справедлив закон Кулоновского трения, так, что Fтр= f N, где f – коэффициент трения, величина которого перемена во времени и определяется условиями взаимодействия и состояния трущихся пар [2]. Дифференциальное уравнение равновесия нейтральной линии упругой ворсины имеет вид [3]: d2 и ____dy2____ _ Mx l»®T'z = Eb , где: E – модуль упругости первого рода; lx – момент инерции сечения вор , 17 dh3 , ла2 fd2 , , 2 A сины (рис.1)Jx = — + —к—+гг . 1 /JX 12 4 ^16 J Введем систему координат xiOiyi(Oi совпадает с точкой заделки ворсины 3), связанную с каждой ворсиной и повернутую на угол Ф i от инерциальной системы xOy Рисунок 5 –Схема деформирования щеточного ворса: 1 – точка срыва; 2 – точка начала контакта; 3 – точка заделки ворса Напряженно-деформированное состояние (НДС) каждой ворсины (рис.6) будет определяться граничными условиями, связанными с углом поворота Фi и прогибом, т.е. координатами конечного среза ворсины vi и. ui. Причем ^ — /COS ф1 . (5) Определим (см. рис. 5), величину изгибающего момента Mx. = PtX COS 0t , где Pi = Jpp^i . Учитывая закон Кулоновского трения Pi = fNt , получим Pt = NiJT+p, или Pt = Ft^ . Окончательно для изгибающего момента имеем: M4=7^iFiX. (6) L J COS U( Рисунок 5 –Схема изгиба ворсины Аппроксимируем положение упругой линии каждой отдельной ворсины контакта конца ворсины с дорожным покрытием полиномом второго порядка xt = a + by + cyi , где а,b,c – коэффициенты, определяемые из граничных условий для концов ны a = b = 0 . Тогда для функции центральной линии и ее производных получим: 2 du „ d2u „ mx Xi = cyt;dy ~ ^^yi ; ^ = 2c. (7) Введем граничные условия: . . Обозначим Pi ~ (Ti + 9i) и подставим граничные условия в уравнение упругой балки, получим для конечного среза ворсины ut = cyp. Тогда для значения размерного коэффициента c получим формулу ^ y? , (8) где: Ui = 7?sin0j ; 0i = arctan^/y?) . Решение уравнения (4) с учетом (5 8) относительно граничных усло вий Ft при известной конечной деформации 8t и углового положения ворсины можем получить методом простых итераций при заданной точности расчета 8 . Алгоритм решения задачи представлен последовательностью, изображенной на рис. 6. Результаты решения задачи приведены в виде графиков на рис.7 – 10. Рисунок 6 – Алгоритм вычисления силы трения ворсины с дорожным покрытием Из графиков следует, что характеристики силового взаимодействия ворса щетки зависят от величины сближения щетки с дорожным покрытием и от угла поворота щетки. Причем наибольших значений изгибающий момент достигает только лишь при прохождении ворсины больше середины пути контакта с дорожным покрытием. Определим выражение для касательно силы контакта ворсины на основании (6) в виде: , тогда Уг71+/ условием момента «срыва» (распрямления волокна за счет внутренней энергии упругой деформации), определяющим рабочий процесс, будет являться условие достижения значения этой силы величины силы трения в контакте, определяемой по условию Кулоновского трения коэффициентом трения, т.е. Mxtf COS 0; Fi = ^J^ Разработанный алгоритм расчета сил взаимодействия ворса щеток с дорожным покрытием (рис.6) с учетом критерия (9) и математической модели процесса трения [1] может быть положен в основу методики оценки функционирования подметальных щеток коммунальных машин в различных ус- ловиях их эксплуатации. Рисунок 7 – Зависимость характеристик силового взаимодействия от угла поворота щетки: а) – тангенс угла контакта р; б) – изгибающий момент Mi, Нхмм;: в) – поперечная деформация волокна Vi ; ширина зоны контакта контакта:1 – 50 мм; 2 – Рисунок 9 – Зависимость наибольшей величины изгибающего момента Mi , НXмм от диаметра щетки при ширине пятна контакта 90 мм Рисунок 10 – Зависимость наибольшей величины изгибающего момента Mi , НXмм от и ширины пятна контакта формация волокна Vi , мм от угла пово-