Математическое моделирование технических систем в нормальной форме пространства состояний

Автор: Прошина Р.Д.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Общие проблемы машиностроения
Статья в выпуске: 1-3 т.13, 2011 года.
Бесплатный доступ
Приведена систематизация методов математического моделирования управляемых объектов машиностроения в нормальной форме пространства состояний. В качестве примера проведено математическое моделирование следящего электропривода постоянного тока.
Математическое моделирование, пространство состояний, управление
Короткий адрес: https://sciup.org/148199687
IDR: 148199687 | УДК: 681.5:681.3
Mathematical modeling of technical systems in normal form of state space
Ordering the methods of mathematical modeling of operated objects in machine building in normal form of state space is resulted. As an example the mathematical modeling of tracking electric drive of direct current is spent.
Текст научной статьи Математическое моделирование технических систем в нормальной форме пространства состояний
выходной переменной (вложенная структура модели с обратными связями по переменным состояния); введением переменных состояния методом понижения порядка (вложенная структура модели с местными обратными связями по выходу) и 2 метода формирования выходной координаты системы: пропорционально одной из координат системы и в виде взвешенной суммы координат состояния (рис. 1). В результате образуется система из 8 модификаций математических моделей в нормальной форме ПС – 4 с прямой причинноследственной связью и 4 – с обратной причинно-следственной связью.
Рис. 1. Методы формирования моделей систем управления в нормальной форме пространства состояний
Суть предлагаемых методов математического описания системы n-го порядка nm
Z a i x ( i )( t ) = £ j ( j )( t ) i = 0 j = 0
с выходной x и входной y координатами, коэффициентами характеристического полинома ai и оператора входного воздействия bj в нормальной форме пространства состояний с прямой причинно-следственной связью первой модификации [1, 2], состоит в том, что переменные состояния vv в моделях ПС
полюсов и m нулей
V ( 1 )( t ) = AV ( t ) + By ( t ) ; x ( t ) = CV ( t ) + dy ( t )
* m * m - 1 * *
„ , , _ b m s + b m — i s + ... + b i s + b o
W ( s ) n . * n - 1 . . * . *
s + ^ n - 1 s + ... + a i s + a o
,
вводят, начиная с n -oй фазовой переменной в соответствии с выражением
матрицы в математических моделях НФПС с прямой причинно-следственной связью могут быть представлены в виде следующих четырёх модификаций
x ( n v ) ( t ) , v e ( m , n ] ;
, . m - v
x ( n - v ) ( t ) - 2 W ( t ) , i = 0
v< 0, m ] ;
^ x ( n ) ( t ) + X o y ( t ) , v = 0,
*
- an - 1
*
a n - 2 ••• - a1
.
.
.
A =
.
.
.
значения коэффициентов λ i вычисляют по рекуррентным формулам
..
.
..
.
.
.
.
.
.
.
X i =
* bi ,
i = m ;
C =
;
* m *
bi 2 Xjan+i- j, j=i+1
i = m - 1,0,
*
- an - 1
*
a n - 2 ■■■ - a1
.
.
.
а матрицы A, B, C и коэффициент d задают в виде
A =
.
.
.
..
.
..
.
.
.
.
-an-1 - an-2 ...- a2 - a*
1 0 ... 0 00
0 1 ... 0 00
... ...... ... ......
0 0 ... 1 00
0 0 ... 0 10
’ X0 1
X1
B =
λ m -1 λ m
0 C = [ 0 0 ... 1 ]
; ;
d =
X m ,
I0,
при m = n ; при m < n .
Здесь a* = a i [a n , i = 0, n ; b = b j/an , j = 0 m , В общем случае для объектов исследования, передаточные функции которых содержат n
.
.
.
*
.
*
.
..
..
... C 0 ] ;
C = [ C n - 1
C n - 2
A =
..
.
...
C = [ 0
A =
..
.
C = [ X n - 1
...
X n - 2
...
;
0...0
0 ... 0
0...0
0... 1
.........
;
0...0
0 ... 0
0...0
0... 1
.........
.
X0]
Коэффициенты в предлагаемых математических моделях определяются следующими выражениями:
z , = b i - t jn + l - j, i = \T n j = i + 1 ;
* ,* * *
C n = b n C i = b i b n a i , 1 = °’ n 1
, .
Для моделей с обратной причинно следственной связью
-
V * ( 1 ) = a * V * + в * У, ;
x = С* V* + dy система (1) является сопряжённой
-
К(1 ) = A Т V * + С Т у. ;
-
x = B Т V * + dy .
Поэтому матрицы в этих моделях задаются формулами
-
A * = A Т B * = C Т C * = B Т •
При моделировании сложных объектов машиностроения, состоящих из разнородных элементов’ к отдельным частям системы предъявляются противоречивые требования, что обуславливает необходимость использования при исследовании этих систем комбинированных форм пространства состояний. Так, при исследовании управляемых приводов авиационных тренажёров, станков, центрифуг и многих других объектов, необходимо анализировать поведение механических координат: перемещений, скоростей, ускорений, градиентов ускорений (линейных или угловых), что может быть эффективно проведено на моделях первой модификации (2). Для управляющей части при этом возникает необходимость независимого формирования, вариации и анализа отдельных компонент, пропорциональных производным или интегралам ошибки в системе. Поэтому управляющую часть замкнутой системы целесообразно моделировать на базе моделей второй модификации (3). Моделирование систем с внутренними обратными связями по выходной координате рационально на базе моделей (4), (5).
В качестве примера приведём математическую модель замкнутой системы следящего электропривода постоянного тока, матрицы которой имеют следующую структуру
|
- a 2 |
- а к |
- а к |
° |
° |
- 1 |
Г т 1 |
||
|
1 |
° |
° |
° |
° |
° |
о ° |
||
|
A = |
° |
1 |
° |
° |
° |
° |
B = |
° |
|
C 2 |
C 1 |
C ° - |
а г |
- а 1 |
- а ° - C 3 |
C 3 |
||
|
° |
° |
° |
1 |
° |
° |
° |
||
|
. ° |
° |
° |
° |
1 |
° . |
_ ° _ |
||
|
С = |
[ 0 |
° °( |
) ° 1 ] |
; |
||||
Первые три строчки матрицы системы задают структуру и параметры регулятора, а последние три строчки - структуру и параметры объекта управления (машины постоянного тока с вентильным преобразователем). При этом первая часть матрицы A представлена в форме модели второй, а вторая - первой модификации ПС, что позволяет с одной стороны эффективно исследовать структуру формирования управляющего сигнала, а вторая определить характер изменения угла поворота, скорости и ускорения в системе (рис. 2).
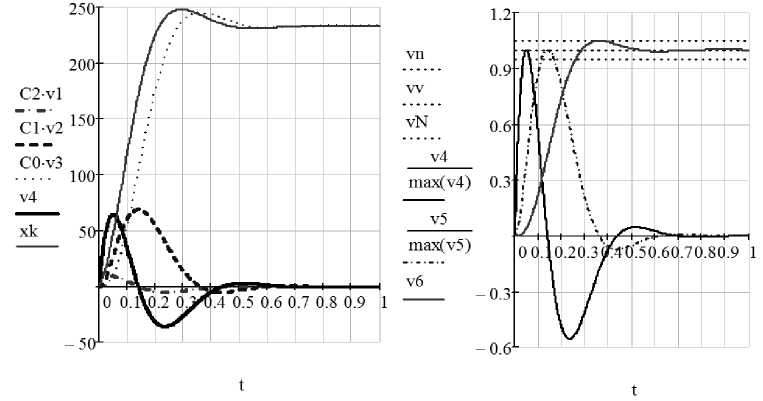
Рис. 2. Характер изменения переменных состояния в модели электропривода
Результаты исследования следящего электропривода постоянного тока мощностью 0,17 кВт в среде Mathcad (рис. 2) отражают соотношения между составляющими управляющего сигнала, пропорциональных ошибке и её производным. Наименьшее значение имеют составляющие пропорциональные третьей и второй производным. При C 3 =0 перерегулирование увеличивается незначительно с σ=4,981% до σ=5,223%, при C 2 =0 возрастает до σ=6,830%, при C 2 =C 3 =0 повышается до значения σ=7,128%. Изменение настроек регулятора по первой производной и по ошибке системы существенно изменяет характер переходных процессов, увеличивая колебательность и более чем в пять раз перерегулирование следящего электропривода.
Выводы: отличительная особенность предлагаемой системы математических моделей в нормальной форме пространства состояний с прямой причинно-следственной связью состоит в том, что каждая последующая координата состояний формируется на основании предыдущей, что обеспечивает единство методологических принципов и повышение эффективности при исследовании, анализе и синтезе систем управления по моделям «Вход – выход» и «Вход – состояние – выход».
Список литературы Математическое моделирование технических систем в нормальной форме пространства состояний
- Прошин, И.А. Математическое описание систем управления в нормальной форме пространства состояний/И.А. Прошин, Д.И. Прошин, Р.Д. Прошина//Журнал научных публикаций аспирантов и докторантов. Курск. 2009. № 2. С. 141-143.
- Прошин, И.А. Выбор фазовых координат модели системы управления в нормальной форме пространства состояний//Проблемы технического управления в региональной энергетике: Сборник статей по материалам научно-технической конференции. -Пенза, 2001. С. 23-27.
