Меры по ослаблению помех на уровне проектирования интерфейсного модуля контроля температур для измерительных приборов космических аппаратов

Автор: А. И. Горностаев
Журнал: Космические аппараты и технологии.
Рубрика: Космическое приборостроение
Статья в выпуске: 1, 2024 года.
Бесплатный доступ
При разработке интерфейсных модулей контроля температур, используемых в составе бортовой аппаратуры космических аппаратов, важно правильно обосновать комплекс мер по обеспечению их помехоустойчивости, принимаемых на уровнях проектирования измерительной системы, измерительного прибора и интерфейсного модуля контроля температур. Такое обоснование предполагает оценку эффективности возможных способов ослабления помех на каждом уровне проектирования. Статья посвящена рассмотрению мер по ослаблению помех на уровне проектирования интерфейсного модуля контроля температур, которые следует принимать для обеспечения требуемой помехоустойчивости интерфейсного модуля контроля температур в комплексе с мерами, принимаемыми на других уровнях проектирования. Показано, что для обеспечения требуемой помехоустойчивости на уровне проектирования интерфейсных модулей контроля температур необходимо предусмотреть обоснованные меры по ослаблению помех как в аналоговых устройствах, так и в цифровых устройствах. В обоих случаях возможно ослабление помех частично введением в устройства помехоподавляющих фильтров и частично использованием общей шины питания в качестве электростатического экрана. Кроме того, возможно дополнительное повышение точности измерений путем проведения на заданном интервале времени многократных измерений и усреднения полученных результатов измерений с помощью цифрового фильтра.
Помехоустойчивость, ослабление помех, эквипотенциальная точка, экранирование, помехоподавляющий фильтр, многократные измерения, цифровой фильтр
Короткий адрес: https://sciup.org/14132162
IDR: 14132162 | УДК: 629.7.05
Measures for attenuation of interference at the level of design of the temperature control interface module for spacecraft measuring instruments
When developing temperature control interface modules used as part of spacecraft onboard equipment, it is important to correctly substantiate the set of measures to ensure their noise immunity, taken at the design levels of the measuring system, measuring device and temperature control interface module. Such a justification involves an assessment of the effectiveness of possible interference mitigation techniques at each design level. The article is devoted to the consideration of interference mitigation measures at the design level of the temperature control interface module, which should be taken to ensure the required noise immunity of the temperature control interface module in combination with measures taken at other design levels. It is shown that to ensure the required noise immunity at the design level of temperature control interface modules, it is necessary to provide reasonable measures to mitigate interference in both analog devices and digital devices. In both cases, it is possible to reduce interference partly by introducing noise suppression filters into the devices and partly by using the common power bus as an electrostatic shield. In addition, it is possible to further increase the accuracy of measurements by performing multiple measurements over a given time interval and averaging the obtained measurement results using a digital filter.
Текст статьи Меры по ослаблению помех на уровне проектирования интерфейсного модуля контроля температур для измерительных приборов космических аппаратов
При разработке интерфейсных модулей контроля температур (ИМКТ) для измерительных приборов, реализуемых по магистрально-модульному принципу построения на базе центрального приборного модуля (ЦПМ) с последовательным периферийным интерфейсом (ППИ) и используемых в составе измерительных систем на космических аппаратах (КА) различного назначения, возникает необходимость решения задач обеспечения помехоустойчивой работы ИМКТ на уровнях проектирования измерительной системы, измерительного прибора и ИМКТ [1–3].
Как показано в [3], на функциональные устройства измерительного прибора, включающего в себя ИМКТ, ЦПМ, модуль питания (МП) и межмодульные интерфейсы, в условиях сложной электромагнитной обстановки (ЭМО) на КА воздействует следующая совокупность помех:
– внешние кондуктивные помехи в виде напряжений синфазных и дифференциальных составляющих помех во входных цепях МП и ЦПМ и во входных цепях каналов измерения ИМКТ;
– внутренние коммутационные помехи в МП в виде наведенных синфазных напряжений в цепях гальванической развязки между входными и выходными шинами источника вторичного электропитания (ИВЭП), вызванных переключением в ИВЭП мощных транзисторов;
– электромагнитные помехи в виде наведенных на внутренних цепях функциональных устройств напряжений и токов, возникающих под воздействием образующихся внутри экранирующих рамок модулей вторичных электромагнитных полей.
Все эти составляющие помех проникают различными путями в измерительный тракт ИМКТ и приводят к искажению результатов измерений.
Из проведенного в [3] анализа возможных мер по ослаблению помех на уровне проектирования измерительного прибора следует, что они направлены на ослабление помех в МП, ЦПМ и межмодульных интерфиксах с ИМКТ. Однако эти меры не обеспечивают ослабление дифференциальных и синфазных составляющих помех во входных цепях ИМКТ и ослабление наведенных помех во внутренних цепях ИМКТ, возникающих в результате образования внутри экранирующей рамки ИМКТ вторичного электромагнитного поля. Поэтому проблему обеспечения помехоустойчивости ИМКТ в составе измерительного прибора необходимо также решать принятием дополнительных мер по ослаблению помех на уровне проектирования ИМКТ.
Цель настоящей статьи – показать возможные меры по ослаблению проникающих в измерительный прибор помех, которые могут быть приняты для обеспечения помехоустойчивой работы ИМКТ на уровне проектирования ИМКТ.
1. Общие мерыпо ослаблению действующих на ИМКТ помех
При проектировании вариантов исполнения ИМКТ, реализуемых отдельно для трехпроводной и для четырехпроводной схем подключения термопреобразователей сопротивления (ТС), изначально учитывают, что на них распространяются общие меры по ослаблению помех, предусмотрен- 43
ные в рамках комплексной системы защиты для обеспечения стойкости бортовой аппаратуры (БА) на уровне проектирования измерительного прибора, в соответствии с которыми конструкция ИМКТ должна быть выполнена на основе унифицированной модульной рамки, обеспечивающей надежный электрический контакт со смежными элементами корпуса измерительного прибора по всему периметру соединения [3]. Проектирование ИМКТ ведут с учетом общих требований по защите от статического электричества в соответствии с ОСТ 92–1615–2013 [4].
Конструктивно рассматриваемый ИМКТ может быть исполнен в виде двухсторонней унифицированной модульной рамки (рисунок 1) с на-
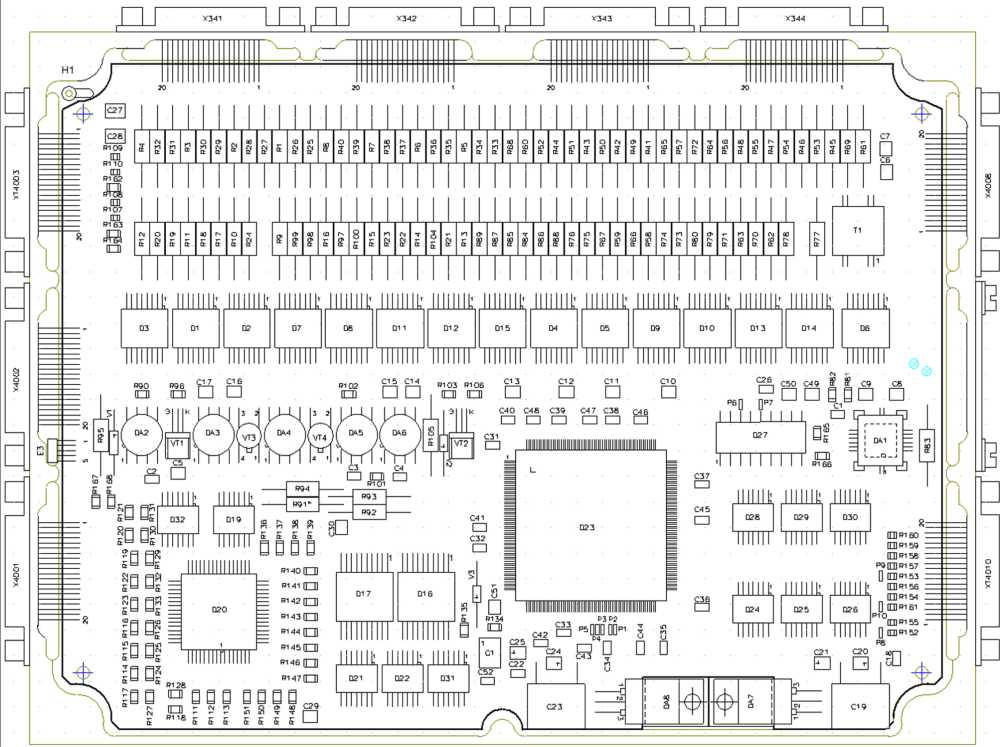
Рисунок 1. Пример конструктивного исполнения ИМКТ для трехпроводной схемы подключения ТС
клеенными на каждой из сторон основания рамки печатными платами и размещенными на них компонентами электронных устройств.
Нижний край модульной рамки используют для образования посадочной стороны измерительного прибора. Со стороны, противоположной посадочной, на модульной рамке размещают соединители с экранирующим корпусом, которые используются для подключения бортовых кабелей. С торцевых сторон модульной рамки размещают соединители без экранирующего корпуса, которые используются для подключения межмодульных кабелей, и технологические соединители, которые применяются для тестового контроля при автономных испытаниях. Посадочные места на модульной рамке, которые предназначены для установки соединителей и не используются, для исключения проникновения электромагнитных помех через отверстия закрывают металлизированными пластинами.
Конструкция унифицированной модульной рамки позволяет обеспечить уравнивание электрических потенциалов стыкующихся в измерительном приборе всех модульных рамок и крышек путем их надежного соединения как между собой, так и с общими кронштейнами (эквипотенциальное соединение).
Такое конструктивное исполнение ИМКТ за счет образования в измерительном приборе непрерывной экранирующей оболочки обеспечивает эффективное ослабление проникающих в ИМКТ внешних электромагнитных помех в широком диапазоне частот. Однако при оценке опасности проникновения внешних электромагнитных помех в ИМКТ и определении необходимости принятия дополнительных мер по их ослаблению учитывают, что с увеличением частоты помехи эффективность общего экранирования уменьшается.
При разработке электрической схемы ИМКТ для защиты от воздействия электростатических разрядов (ЭСР) учитывают необходимость устанавливать во входных каскадах каналов измерения компоненты, ограничивающие напряжение или ток через интегральные микросхемы (в случаях, когда они не имеют собственной входной защиты и когда это технически возможно). В качестве таких компонентов могут быть использованы защитные диоды, резисторы и т.д. [5, 6].
При разработке печатных плат ИМКТ для исключения возможности возникновения ЭСР учитывают необходимость применения нанопроводящего диэлектрика, позволяющего защитить печатные узлы БА от внутренней электризации [7].
Следует отметить, что наличие в измерительном приборе непрерывной экранирующей оболочки и наличие в ИМКТ во входных каскадах каналов измерения защитных компонентов не препятствует проникновению в ИМКТ внешних кондуктив-
Том 8
ных помех, действующих как во входных цепях каналов измерения, так и в цепях интерфейсов питания аналоговых и цифровых устройств и интерфейса ППИ. Проникновение в ИМКТ помех по всем этим путям может быть опасным в широком диапазоне частот. В этом случае для оценки опасности проникновения помех в ИМКТ и определения необходимости принятия дополнительных мер по их ослаблению оценивают эффективность ослабления кондуктивных помех для каждого пути проникновения отдельно.
2. Аналитическая модель воздействия помех на ИМКТ
Для оценки эффективности принимаемых мер по ослаблению внешних электромагнитных и кондуктивных помех и определения необходимости принятия дополнительных мер по их ослаблению на уровне проектирования ИМКТ следует использовать полную аналитическую модель воздействия помех на ИМКТ. Однако в данной статье рассмотрим упрощенную аналитическую модель воздействия внешних электромагнитных и кондуктивных помех на ИМКТ (без подробной детализации элементов конструкции ИМКТ и без учета размещения с двух сторон ИМКТ рамок смежных модулей), приведенную на рисунке 2.
В такой модели анализу воздействия помех подвергаются многоканальная схема измерения (МСИ), аналого-цифровой преобразователь (АЦП), устройство сбора цифровых данных (УСЦД) и контроллер интерфейса (КИ), синхронизация работы которых производится по сигналам управления СУ1 и СУ2, автоматически формируемым в каждом цикле измерений T ци при запуске диаграммы опроса каналов измерений в процессе чтения цифровых данных из ИМКТ по интерфейсу ППИ [3].
Согласно приведенной на рисунке 2 упрощенной аналитической модели энергия электромагнитного поля, прикладываемая к корпусу рамки ИМКТ от внешних источников помех ( W п.имкт ), приводит к образованию во внутреннем пространстве рамки вторичного электромагнитного поля, энергия которого распределяется между аналоговыми ( W п.A ) и цифровыми ( W п.G ) устройствами ИМКТ. В результате вследствие электромагнитной индукции на внутренних цепях этих устройств (МСИ, АЦП, УСЦД, КИ) возникают напряжения и токи наведенных помех (на рисунке 2 не показаны). Эти помехи проникают в измерительный тракт ИМКТ и приводят не только к искажению формы аналогового сигнала на выходе МСИ ( U мси ), но и к нестабильности логических уровней цифровых сигналов на выходах АЦП ( D ацп ) и УСЦД ( D усцд ), а также передаваемых через КИ по интерфейсу ППИ.
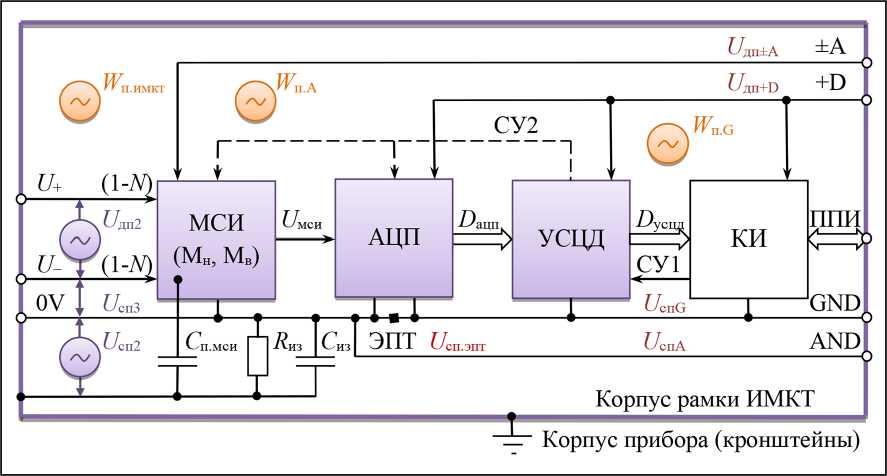
Рисунок 2. Упрощенная аналитическая модель воздействия помех на ИМКТ
Кроме того, на ИМКТ воздействуют внешние кондуктивные помехи:
– во входных цепях МСИ дифференциальные помехи U дп2 в каждом из N каналов измерений между сигнальными цепями U + и U – , синфазные помехи U сп2 между общей шиной питания 0V и корпусом рамки и синфазные помехи U сп3 в каждом из N каналов измерений между сигнальной цепью U – и общей шиной питания 0V;
– в цепях питания аналоговых устройств дифференциальные помехи U дп±А между шинами питания ±A и AND и синфазные помехи U спA между шиной питания AND и корпусом рамки;
– в цепях питания цифровых устройств дифференциальные помехи U дп+D между шинами питания +D и GND и синфазные помехи U спG между шиной питания GND и корпусом рамки.
Для исключения в аналоговом и цифровом контурах протекания токов нагрузки общих участков, которые могут привести к взаимопроникновению помех из одного контура в другой, шины питания AND и GND объединяют в ИМКТ с общей шиной 0V в эквипотенциальной точке (ЭПТ) [3].
Поскольку в ИМКТ шины питания 0V, AND и GND объединены ЭПТ, синфазные помехи во входных цепях ( U сп2 ) и в цепях питания ( U спA , U спG ), действующие относительно корпуса рамки, приводят к возникновению в ЭПТ суммарных синфазных помех U сп.эпт , уровень напряжения которых можно оценить по расчетному соотношению (геометрическая сумма независимых случайных величин):
^ сп.эпт
=J«I 2 +^+w^.
Суммарные синфазные помехи Uсп.эпт возникают в ЭПТ при протекании токов помех через емкость изоляции Cиз и сопротивление изоляции Rиз между общей шиной питания 0V и корпусом рамки и непосредственно воздействуют как на внутренние цепи МСИ через паразитные емко- сти Cп.мси этих цепей с основанием корпуса рамки, так и на внутренние цепи АЦП, УСЦД и КИ через соответствующие паразитные емкости этих цепей с основанием корпуса рамки (на рисунке 2 не показаны). Эти помехи представляют собой наибольшую опасность для ИМКТ при воздействии на внутренние цепи МСИ, так как в этом случае прохождение помех на вход АЦП происходит через усилительные каскады МСИ, что приводит к их усилению.
Значения параметров внешних электромагнитных и кондуктивных помех, действующих на ИМКТ, могут превышать допустимые нормы, при которых обеспечивается требуемая помехоустойчивость ИМКТ, поэтому для оценки опасности проникновения помех в ИМКТ и определения необходимости принятия дополнительных мер по их ослаблению оценивают:
– в случае воздействия электромагнитных помех эффективность экранирования отдельных устройств принятыми в ИМКТ конструктивными решениями;
– в случае воздействия кондуктивных помех эффективность мер по ослаблению в отдельных устройствах дифференциальных и синфазных составляющих помех принятыми в ИМКТ схемотехническими решениями.
Для оценки эффективности экранирования отдельных устройств в ИМКТ используют затухание экранирования А э , характеризующее величину затухания, вносимого экраном, а для оценки эффективности мер по ослаблению в отдельных устройствах дифференциальных и синфазных составляющих помех используют вносимое затухание А ф , характеризующее величину затухания, вносимого помехоподавляющим фильтром (ПФ), которые были рассмотрены для решения аналогичных задач в [3].
Для всех случаев воздействия на ИМКТ внешних электромагнитных и кондуктивных помех проводят анализ результатов оценки опасности
If I— ОСМИЧЕСКИЕ АППАРАТЫ VI ТЕХНОЛОГИИ ГЙЙЙЙЙН
их проникновения в ИМКТ в заданных частотных и временных диапазонах. Если в ИМКТ изначально предусмотренные меры по экранированию электронных устройств ИМКТ от воздействия электромагнитных помех и по ослаблению дифференциальных и синфазных составляющих кондук-тивных помех окажутся недостаточно эффективными, то должны быть приняты дополнительные меры по ослаблению помех на уровне проектирования ИМКТ.
3. Дополнительные меры по ослаблению помех на уровне проектирования
На уровне проектирования ИМКТ проводят обоснование необходимости принятия дополнительных мер (рисунок 2) по ослаблению электромагнитных помех, которые проникают в ИМКТ в результате образования во внутреннем пространстве рамки ИМКТ вторичного электромагнитного поля, энергия которого распределена между аналоговыми ( W п.A ) и цифровыми ( W п.G ) устройствами, и по ослаблению кондуктивных помех, которые проникают в ИМКТ через входные цепи МСИ ( U дп2 , U сп2 , U сп3 ) и цепи питания аналоговых ( U дп±А , U cпА ) и цифровых ( U дп+D , U cпG ) устройств. При этом такое обоснование для кондуктивных помех, которые проникают в КИ ИМКТ через цепи интерфейса ППИ, не проводят, так как оно проводится на уровне проектирования измерительного прибора [3].
В случае необходимости в качестве дополнительных мер по ослаблению помех на уровне проектирования ИМКТ рассматривают как конструктивные решения (использование общих шин питания аналоговых и цифровых устройств в ка-
Том 8
честве электростатических экранов), так и схемотехнические решения (использование в аналоговых и цифровых устройствах в цепях проникновения помех помехоподавляющих фильтров). Кроме того, в качестве дополнительной меры для повышения точности измерения рассматривают статистические методы обработки цифровых данных, применяемые при многократных измерениях (фильтрация цифровых данных на выходе АЦП).
Рассмотрим более подробно, какие могут быть приняты дополнительные меры по ослаблению электромагнитных и кондуктивных помех отдельно для аналоговых и цифровых устройств ИМКТ и каким образом может быть организована фильтрация цифровых данных на выходе АЦП.
-
3.1. Ослабление помех
в аналоговых устройствах ИМКТ
К основным аналоговым устройствам ИМКТ относятся (рисунок 3):
– схема опроса каналов (СОК), инструментальный усилитель (ИУ) и выходной усилитель (ВУ), которые образуют МСИ, обеспечивающую опрос контролируемых напряжений во входных сигнальных цепях U + , U– в N каналах измерений, и во внутренних цепях эталонных мер М н , М в для нижней и верхней калибровочных точек и их усиление до уровня U мси на выходе МСИ в заданных диапазонах измерения;
– аналоговая часть АЦП, обеспечивающая прием с выхода МСИ усиленного напряжения U мси для преобразования в цифровой код.
Синхронизация работы аналоговых устройств в ИМКТ (в СОК – выбор номера опрашиваемого канала измерения, в ВУ – изменение коэффициента усиления при переходе на другой диапазон измерения) производится по сигналам управления СУ2 из УСЦД, автоматически формируемым
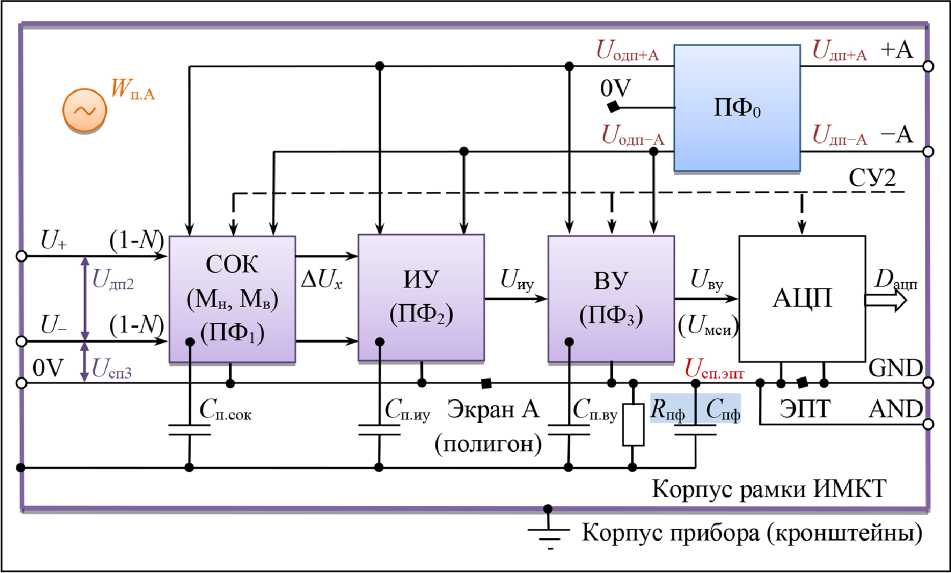
Рисунок 3. Дополнительные меры по ослаблению помех, принимаемые для аналоговых устройств ИМКТ
в пределах заданного цикла измерений T ци при инициализации диаграммы опроса каналов поступающими из КИ сигналами управления СУ1. Конструкция ТС, подключаемых ко входам МСИ, согласно техническим условиям на их применение, позволяет использовать их в цепях постоянного и переменного тока с частотой до 100 Гц, поэтому в пределах заданного цикла измерений T ци время опроса канала Т ок ограничено значением не менее 10 мс [8].
Опрос контролируемых напряжений Ux в СОК (во входных сигнальных цепях U + , U- в N каналах измерений и во внутренних цепях эталонных мер М н , М в для нижней и верхней калибровочных точек), возникающих при протекании генерируемого в СОК измерительного тока I и через ТС или эталонные меры (на рисунке 3 не показано), производится в зависимости от схемы подключения ТС ко входам МСИ либо с помощью двух источников измерительного тока (в случае использования трехпроводной схемы подключения), либо с помощью одного источника измерительного тока (в случае использования четырехпроводной схемы подключения) [9]. В обоих случаях в результате опроса на выходе СОК формируется относительно опорного напряжения U оп , соответствующего нижней границе диапазона измерения, дифференциальное напряжение A U x = ( U x - U о п ), которое усиливается в ИУ до промежуточного уровня напряжения U иу и затем в ВУ до нормированного уровня напряжения U ву = U мси , определяемого диапазоном измерения и шкалой преобразования АЦП.
Как показано на рисунке 3, проникновение помех в аналоговые устройства ИМКТ происходит в результате воздействия:
-
- дифференциальной и синфазной составляющих помех U дп2 и U сп3 во входных цепях МСИ;
– дифференциальных помех U дп±А в цепях двухполярного питания аналоговых устройств;
-
– синфазных помех U сп.эпт в ЭПТ;
-
- электромагнитных помех, вызванных энергией вторичного электромагнитного поля W п. А , направленной на аналоговые устройства.
Дифференциальные и синфазные помехи U дп2 и U с п3 во входных цепях МСИ, действующие в широком диапазоне частот, непосредственно проникают в усилительный тракт МСИ вместе с полезным сигналом и суммируются с ним. Прохождение этих помех через СОК, ИУ и ВУ, характеризуемые передаточными функциями K сок ( p ), K иу ( p ), K ву ( p ), которые определяют верхнюю граничную частоту Амси полосы пропускания МСИ, приводит к изменению их уровня на входе АЦП в соответствии с общей передаточной функцией усилительного тракта МСИ
K мси ( p ) = K сок ( p ) K иу ( p ) K ву ( p ), где p = j2πf п , f п – частота помехи.
Для ослабления дифференциальных помех U дп2 , действующих на входах каждого канала МСИ между сигнальными цепями U + и U– , в качестве дополнительных мер возможно введение в структуру МСИ в цепях прохождения контролируемых сигналов через СОК, ИУ и ВУ соответствующих помехоподавляющих фильтров ПФ 1 , ПФ 2 и ПФ 3 , сужающих полосу пропускания МСИ.
Поскольку ширина полосы пропускания МСИ характеризуется верхней граничной частотой f в.мси , которая связана с постоянной времени МСИ τ мси соотношением f в.мси = 1/2π τ мси , для определения полосы пропускания МСИ рассчитывают необхо- 47
димое значение постоянной времени τ мси . Расчет производят исходя из условия обеспечения в пределах заданного времени опроса канала Т о к (рисунок 4) в момент времени t уст своевременного установления переходных процессов в усиленном сигнале U мси на выходе МСИ, после завершения которых на интервале времени A t изм = Т о к - 1 у ст возможно произвести измерения с требуемой точностью.
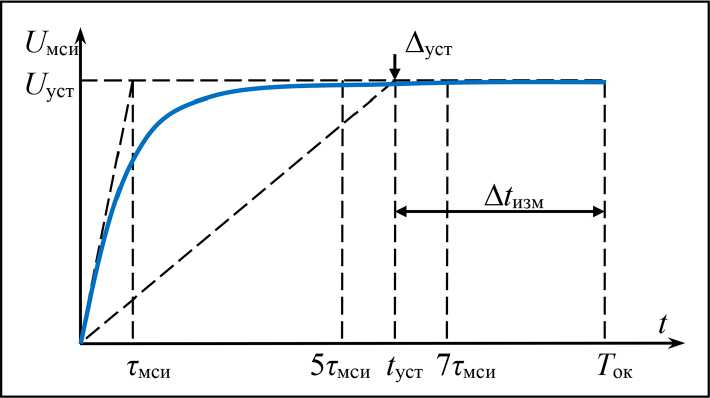
Рисунок 4. Иллюстрация к расчету постоянной времени МСИ по заданному времени установления переходных процессов в контролируемом сигнале
Для обеспечения измерения с требуемой точностью при заданном времени установления переходных процессов t уст определяют допустимое значение отклонения А уст контролируемого сигнала от установившегося уровня U у ст . При повышенных требованиях к точности измерения допустимое значение отклонения А уст уменьшают и в зависимости от этого рассчитывают необходимое значение постоянной времени τ мси из граничного условия:
t уст = (5–7) τ мси ,
■ J
где тмси
Ti + т2 + тз , т 1, т2, т3 - постоянные времени помехоподавляющих фильтров ПФ1, ПФ2 и ПФ3.
Однако введение помехоподавляющих фильтров ПФ 1 , ПФ 2 и ПФ 3 только ограничивает спектр
проникающих на выход МСИ помех, но не решает проблемы ослабления низкочастотных составляющих помех, попадающих в полосу пропускания МСИ, от уровня которых будет зависеть значение случайной погрешности измерения. Основными компонентами случайной погрешности измерения, вызванной низкочастотными составляющими помех, являются естественные помехи от работающей БА и от ЭСР на КА, проникающие во входные цепи МСИ, и помехи, вызванные белым и розовым шумами, возникающие во входных цепях при протекании через ТС генерируемого в МСИ измерительного тока I и .
Ослабление этих помех в пределах полосы пропускания МСИ вызывает определенные труд- ности, так как они проявляются при измерении напряжения Uмси на интервале времени ∆tизм в виде фиксированного случайного отклонения (смещения) от точного значения. Такое случайное отклонение напряжения Uмси на интервале времени ∆tизм может быть как положительным, так и отрицательным, и при однократном измерении может варьироваться в пределах уровня амплитуды помехи, поэтому случайная составляющая погрешности измерения в этом случае будет максимальной.
Тем не менее частично точность измерения напряжения U мси возможно повысить без ослабления уровня помех на входе АЦП, если на интервале времени ∆ t изм проводить многократные измерения, а полученные с выхода АЦП цифровые данные о результатах измерений усреднять в цифровых устройствах ИМКТ, используя статистические методы обработки цифровых данных [10]. В этом случае, учитывая относительно медленную скорость изменения отклонения напряжения U мси от точного значения, следует использовать функцию усреднения для коррелированных измерений, описываемую через передаточную функцию цифрового фильтра (ЦФ) [11]. Более подробно применение ЦФ в цифровых устройствах ИМКТ для усреднения результатов измерения будет рассмотрено ниже в отдельном подразделе.
Кроме того, помехи, вызванные белым и розовым шумами, могут быть дополнительно ослаблены принятием мер по повышению соотношения сигнал/шум на чувствительных элементах ТС при заданном времени опроса канала Ток путем выбора оптимального значения измерительного тока Iи, а также мер по уменьшению фиксированного смещения дифференциального напряжения ДUx на входе ИУ в МСИ, возникающего вслед- ствие присутствия на чувствительных элементах ТС в области низких частот двух разновидностей розового шума – фликкер-шума (flicker noise) и шума, вызванного случайными скачками тока (popcorn noise), путем применения метода стабилизации прерыванием [12].
Том 8
Также важно отметить, что следует по возможности избегать подсоединения к входным цепям МСИ помимо самих ТС любых компонентов, поскольку они являются дополнительными источниками помех. Особо следует обратить внимание на использование фильтрующих конденсаторов для подавления высокочастотных помех. При неправильном выборе типа конденсаторов в цепях фильтрации помех можно столкнуться с неожиданными паразитными эффектами [13]. Например, при использовании керамических конденсаторов можно столкнуться с эффектом диэлектрической абсорбции (памяти), которая может привести к значительным ошибкам в результатах измерений. Если избежать использования конденсаторов во входных цепях невозможно, следует вместо керамических применять пленочные конденсаторы, в которых эффект памяти практически отсутствует.
Для ослабления синфазных помех U с п3 , действующих на входах каждого канала МСИ между сигнальной цепью U _ и общей шиной 0V, возможно дополнительные меры не принимать, так как выпускаемые электронной промышленностью микросхемы ИУ имеют очень большой коэффициент ослабления синфазного сигнала (КОСС), типовое значение которого составляет не менее 106 (120 дБ) при установленном с помощью внешнего резистора коэффициенте усиления ИУ, равном 100. При таком значении КОСС воздействие синфазных помех U с п3 практически не оказывает влияния на уровень напряжения U мси на выходе МСИ.
Дифференциальные помехи U дп±А на шинах двухполярного питания МСИ, также действующие в широком диапазоне частот, проникают в усилительный тракт МСИ опосредованно через внутренние цепи питания аналоговых устройств (цепи питания отдельных компонентов в СОК, ИУ и ВУ) и могут быть опасны как в пределах полосы пропускания МСИ, так и за ее пределами. Если низкочастотные помехи, действующие в полосе пропускания МСИ, непосредственно приводят к фиксированному смещению напряжения на входе АЦП, то высокочастотные помехи, действующие за пределами полосы пропускания МСИ, при проникновении в усилительный тракт вследствие нелинейности характеристик диодов, транзисторов и микросхем, используемых в аналоговых устройствах, могут быть нежелательным образом выпрямлены и перенесены в область более низких частот, попадающих в полосу пропускания МСИ, и также привести к фиксированному смещению напряжения на входе АЦП.
Для ослабления дифференциальных помех Uдп±А, действующих в цепях двухполярного питания каждого аналогового устройства между шинами питания ±А и AND, в качестве дополнительных мер возможно введение в цепи шин питания общего помехоподавляющего LC-фильтра ПФ0, позволяющего понизить уровень помех на его выходе до уровня Uодп±А. При этом общий вывод помехоподавляющего LC -фильтра ПФ0 следует подключать к общей шине питания 0V, образованной после объединения входных шин питания AND и GND в ЭПТ, что позволит дополнительно повысить эффективность ослабления помех.
Однако ослабление дифференциальных помех U дп+А возможно также путем использования фильтров или конденсаторов развязки на каждом активном аналоговом устройстве МСИ (на рисунке 3 не показано), подключаемых к шинам питания ±А и AND как можно ближе к этим устройствам. Наибольший эффект от такой развязки может быть получен в первом звене активных аналоговых устройств – в СОК (в стабилизаторе опорного напряжения и источниках измерительного тока), так как в этом случае снижается уровень проникающих на выход СОК дифференциальных помех, подверженных усилению при дальнейшем их прохождении через ИУ и ВУ на выход МСИ.
Синфазные помехи U с п . эпт в ЭПТ, также действующие в широком диапазоне частот, аналогично проникают в усилительный тракт МСИ опосредованно через внутренние сигнальные цепи аналоговых устройств (цепи элементов обвязки микросхем в СОК, ИУ и ВУ) и могут быть опасны как в пределах полосы пропускания МСИ, так и за ее пределами. И в этом случае высокочастотные помехи, действующие за пределами полосы пропускания МСИ, могут быть нежелательным образом выпрямлены и перенесены в область более низких частот, попадающих в полосу пропускания МСИ, и также привести к фиксированному смещению напряжения на входе АЦП.
Для ослабления синфазных помех U сп . эпт , действующих в ЭПТ и проникающих в аналоговые устройства, в качестве дополнительной меры возможно подключение помехоподавляющего RC -фильтра (параллельное соединение высокоомного резистора R п ф и высоковольтного конденсатора C пф ) между общей шиной питания 0V и корпусом рамки ИМКТ. Наличие в таком фильтре высокоомного резистора R п ф препятствует в процессе эксплуатации ИМКТ в составе измерительного прибора возникновению больших значений статической разности потенциалов между гальванически развязанными общей шиной питания 0V и корпусом рамки (плавающего потенциала), а наличие высоковольтного конденсатора C п ф позволяет обеспечить снижение уровня помех во внутренних цепях аналоговых устройств при больших значениях статической разности потенциалов.
Однако использование помехоподавляющего RC-фильтра между общей шиной питания 0V и корпусом рамки для ослабления помех в ЭПТ недостаточно эффективно, так как в широком диапазоне частот сохраняются условия для их про- никновения во внутренние сигнальные цепи СОК, ИУ и ВУ через соответствующие паразитные емкости Cп.сок, Cп.иу и Cп.ву, распределенные по площади основания корпуса рамки, между различными точками которого может возникнуть разность потенциалов (например, при воздействии прямых ЭСР, при которых за счет растекания токов разряда возникают наведенные напряжения на поверхности основания корпуса рамки). Кроме того, эффективность такого фильтра с понижением частоты помехи уменьшается.
Для ослабления помех, проникающих во внутренние сигнальные цепи аналоговых устройств со стороны основания корпуса рамки, эффективной дополнительной мерой в широком диапазоне частот может быть использование общей шины питания 0V в качестве электростатического экрана. Такой экран выполняют конструктивно в виде сплошного проводящего слоя (полигона) в многослойной печатной плате, который располагается (на рисунке 3 обозначен как Экран А) между верхними слоями платы с печатными проводниками внутренних цепей аналоговых устройств и нижним непроводящим слоем платы, который приклеивается к основанию корпуса рамки [14].
Также возможно ослабление помех, проникающих во внутренние сигнальные цепи СОК, ИУ и ВУ через паразитные емкости C п.сок , C п.иу и C п. ву , путем исключения в области размещения аналоговых устройств МСИ проводящего основания корпуса рамки и замены его на основание из непроводящего материала. В этом случае эффект ослабления помех достигается уменьшением паразитных емкостей C п . сок , C п . иу и C п . ву за счет пространственного удаления проводящего основания корпуса рамки. Однако этот способ ослабления помех конструктивно более сложен и менее эффективен, поэтому применяется редко. Кроме того, нарушение непрерывности экранирующей оболочки в проводящем основании корпуса рамки приводит к увеличению уровня электромагнитных помех, вызванных направленной на аналоговые устройства МСИ дополнительной энергией вторичного электромагнитного поля W п.A из соседней области внутреннего пространства корпуса рамки.
Электромагнитные помехи, вызванные направленной на аналоговые устройства энергией вторичного электромагнитного поля W п.A , также действуют в широком диапазоне частот, но в области высоких частот далеко за пределами полосы пропускания МСИ, и также проникают в усилительный тракт МСИ опосредованно через внутренние сигнальные цепи аналоговых устройств (цепи элементов обвязки микросхем в СОК, ИУ и ВУ), но в виде наведенных напряжений и токов помех в сигнальных цепях аналоговых устройств и технологических цепях, используемых для тестового контроля аналоговых устройств. Эти по-
мехи также представляют опасность за пределами полосы пропускания МСИ, так как и в этом случае высокочастотные помехи могут быть нежелательным образом выпрямлены и перенесены в область более низких частот, попадающих в полосу пропускания МСИ, и также привести к фиксированному смещению напряжения на входе АЦП.
Для ослабления электромагнитных помех, проникающих в наиболее чувствительные элементы аналоговых устройств МСИ, в качестве дополнительной меры возможно использование местных электростатических экранов, подключенных к общей шине питания 0V, или специальной экранирующей конструкции основания корпуса рамки в области размещения наиболее чувствительных элементов [15]. Однако оба этих способа экранирования для ослабления электромагнитных помех в МСИ обычно не применяют из-за дополнительных расходов защитных компонентов (например, экранирующие крышки, проводящие прокладки и др.), а ограничиваются лишь использованием схемотехнических решений, позволяющих обеспечить уменьшение чувствительности МСИ к электромагнитным помехам до необходимых норм.
Отдельно стоит отметить наличие в МСИ те- стовых выводов, используемых при автономных испытаниях ИМКТ, которые могут иметь длину, соизмеримую с длиной волны электромагнитных помех, действующих в радиочастотном диапазоне. На таких выводах под воздействием электромагнитных помех могут генерироваться токи, которые будут вступать во взаимодействие с аналоговыми устройствами МСИ и также приводить к появлению на выходе МСИ фиксированного смещения напряжения, вызванного выпрямленными токами.
Для ослабления наведенных помех в цепях тестовых выводов следует уменьшать длину этих цепей, насколько это возможно, или дополнительно вводить в цепи тестовых выводов аналоговых устройств радиочастотные фильтры, которые будут мешать демодуляции нежелательных низкочастотных сигналов помех (в простейшем случае это
Том 8
могут быть включенные в цепи тестовых выводов защитные резисторы).
-
3.2. Ослабление помех
в цифровых устройствах ИМКТ
К основным цифровым устройствам ИМКТ относятся (рисунок 5):
– цифровая часть АЦП, обеспечивающая преобразование напряжения на входе АЦП в цифровой код и формирование на его выходе цифровых данных о результатах измерений;
– УСЦД и КИ, обеспечивающие сбор цифровых данных о результатах измерений и их передачу в ЦПМ по интерфейсу ППИ.
Дополнительным цифровым устройством ИМКТ является ЦФ, который используется для усреднения цифровых данных, поступающих из АЦП при проведении многократных измерений.
Синхронизация работы основных цифровых устройств ИМКТ (в АЦП – запуск процесса преобразования поступающих из опрашиваемых каналов измерений на вход АЦП напряжений U мси в цифровой код, в УСЦД – регистрация в ячейках памяти поступающих с выхода АЦП цифровых данных D ацп о результатах измерений) производится по сигналам управления СУ2 из УСЦД, автоматически формируемым в пределах заданного цикла измерений T ци при инициализации диаграммы опроса каналов поступающими из КИ сигналами управления СУ1.
Опрос каналов измерений производится по сигналам управления СУ2 в пределах заданного цикла измерений T ци последовательно. Во время опроса канала Т ок запуск процесса преобразования поступающего на вход АЦП напряжения U мси в цифровой код и последующая перезапись цифровых данных D ацп о результатах измерений с выхода АЦП в УСЦД производятся после завершения установления переходных процессов ( t уст ) в контролируемом сигнале на интервале времени измерения ∆ t изм = Т ок – t уст .
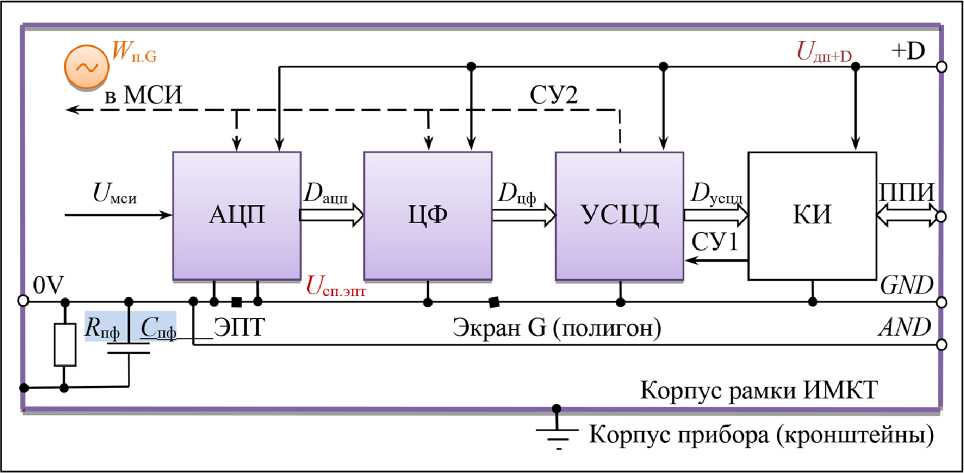
Рисунок 5. Дополнительные меры по ослаблению помех, принимаемые для цифровых устройств ИМКТ
Здесь возможны два варианта перезаписи цифровых данных в УСЦД – непосредственно цифровых данных D ацп с выхода АЦП при проведении однократных измерений или усредненных цифровых данных D цф с выхода ЦФ при проведении многократных измерений. Первый вариант достаточно прост в реализации, так как не предполагает перед перезаписью проведения с цифровыми данными вычислительных операций, однако не обеспечивает высокую точность измерений из-за наличия на входе АЦП фиксированного случайного отклонения (смещения) напряжения от точного значения. Второй вариант сложен в реализации, так как предполагает в ЦФ проведение вычислительных операций, обеспечивающих реализацию алгоритмов усреднения (фильтрации) цифровых данных. При этом для синхронизации работы АЦП и ЦФ в УСЦД должны формироваться дополнительные сигналы управления СУ2. В обоих случаях логические функции цифровых устройств и вычислительные операции с цифровыми данными могут быть для реализации на программируемой логической интегральной схеме (ПЛИС).
После завершения опроса всех каналов измерения сохраненный массив усредненных цифровых данных D усцд в УСЦД за текущий цикл измерений T ци передается через КИ по интерфейсу ППИ в ЦПМ для дальнейшей обработки.
Как показано на рисунке 5, проникновение помех в цифровые устройства ИМКТ происходит в результате воздействия:
– дифференциальных помех U дп+D в цепях питаниях цифровых устройств;
– синфазных помех U сп.эпт в ЭПТ;
– электромагнитных помех, вызванных энергией вторичного электромагнитного поля W п.G , направленной на цифровые устройства.
Дифференциальные помехи U дп+D в цепях питания цифровых устройств (АЦП, ЦФ, УСЦД и КИ), действующие в широком диапазоне частот, проникают в цифровой тракт опосредованно через внутренние цепи питания отдельных логических элементов в микросхемах и приводят на высоких частотах к нестабильности логических уровней сигналов в цифровых устройствах.
Для ослабления дифференциальных помех U дп+D , действующих в цепях питания цифровых устройств между шинами питания +D и GND, в качестве дополнительных мер возможно введение в цепи питания каждого цифрового устройства фильтров или конденсаторов развязки (на рисунке 5 не показано), подключаемых к шинам питания +D и GND как можно ближе к этим устройствам.
Синфазные помехи Uсп.эпт в ЭПТ, также действующие в широком диапазоне частот, проникают в цифровые устройства аналогично, как и дифференциальные помехи, опосредованно, но через сигнальные цепи элементов обвязки цифровых микросхем, связанные с основанием корпуса рамки ИМКТ через соответствующие паразитные емкости (на рисунке 5 не показано), и также в условиях сложной ЭМО на КА могут привести на высоких частотах к недопустимой нестабильности логических уровней сигналов и возможным сбоям в работе цифровых устройств и, как следствие, к грубым ошибкам измерений.
Для ослабления синфазных помех U сп.эпт , действующих в ЭПТ и проникающих в цифровые устройства, в качестве дополнительной меры возможно, как и в случае проникновения помех в аналоговые устройства, подключение между общей шиной питания 0V и корпусом рамки ИМКТ помехоподавляющего RC -фильтра (параллельное соединение высокоомного резистора R пф и высоковольтного конденсатора C пф ).
Однако при использовании такого помехоподавляющего RC -фильтра также сохраняются условия проникновения синфазных помех U сп. эпт во внутренние сигнальные цепи цифровых устройств через соответствующие паразитные емкости (на рисунке 5 не показано), распределенные по площади основания корпуса рамки, между различными точками которого может возникнуть разность потенциалов. Поэтому для ослабления синфазных помех U сп.эпт в ЭПТ и в этом случае более эффективной дополнительной мерой может быть использование общей шины питания GND в качестве электростатического экрана. Такой экран аналогично, как и для аналоговых устройств, выполняют конструктивно в виде сплошного проводящего слоя (полигона) в многослойной печатной плате, который располагается (на рисунке 5 обозначен как Экран G) между верхними слоями платы с печатными проводниками внутренних сигнальных цепей цифровых устройств и нижним непроводящим слоем платы, который приклеивается к основанию корпуса рамки. При этом отдельно выполненные Экран G для цифровых устройств и Экран А для аналоговых устройств для исключения возможного взаимопроникновения кондук-тивных помех из одного контура протекания тока нагрузки в другой следует объединять в ЭПТ.
Электромагнитные помехи, вызванные направленной на цифровые устройства энергией вторичного электромагнитного поля W п.G , также действуют в широком диапазоне частот и аналогично, как и в аналоговых устройствах, проникают в цифровой тракт опосредованно через внутренние сигнальные цепи цифровых устройств (цепи элементов обвязки микросхем в АЦП, ЦФ, УСЦД и КИ) в виде наведенных в сигнальных цепях напряжений и токов помех. Эти помехи также в условиях сложной ЭМО на КА могут привести к недопустимой нестабильности логических уровней сингалов и возможным сбоям в работе цифровых устройств.
(оСМ1ЛЧЕск|ЛЕ АППАРАТЫ VI ТЕХНОЛОГИЯМИ
Для ослабления электромагнитных помех в цифровых устройствах в качестве дополнительной меры для наиболее чувствительных элементов также возможно использование местных электростатических экранов, но подключенных к общей шине питания GND, или специальной экранирующей конструкции основания корпуса рамки в области размещения наиболее чувствительных элементов. Однако из-за пониженной восприимчивости цифровых микросхем к электромагнитным помехам такие экраны обычно не используют.
Том 8
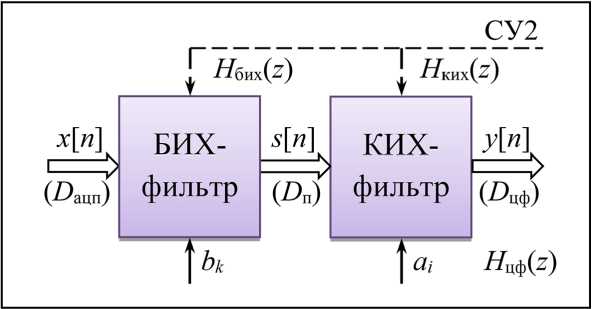
Рисунок 6. Состав ЦФ, используемого в ИМКТ для усреднения результатов измерений
-
3.3. Фильтрация цифровых данных
на выходе АЦП
Цифровые данные (сигналы), полученные в ИМКТ с выхода АЦП при многократных изме- рениях в процессе опроса канала в пределах заданного времени измерения ∆tизм = Ток–tуст, для уменьшения влияния случайных помех на точность измерения должны подвергаться цифровой обработке с помощью линейного ЦФ. Такой ЦФ должен иметь избирательные свойства фильтра нижних частот и обеспечивать реализацию его передаточной функции, которая описывается комплексной частотной характеристикой с заданной полосой пропускания от 0 до верхней граничной частоты fв.цф, соизмеримой с верхней граничной частотой fв.мси полосы пропускания МСИ в аналоговом тракте ИМКТ. При этом цифровая обработка сигналов (ЦОС) должна проводиться на ограниченном интервале времени измерения ∆tизм с конечным числом n отсчетов, взятых в равномерно распределенных на временной шкале точках с периодом (интервалом) дискретизации Т = ∆tизм/n.
При указанных условиях для проведения ЦОС следует использовать линейный рекурсивный ЦФ, работа которого описывается в общем случае линейным разностным уравнением [16]:
м
У[п] = ^
i=0
aix[n
N
- i ] + ^ bky[n - k], k=1
где x [ n ], y [ n ] – дискретные сигналы на входе и выходе ЦФ соответственно; n – текущий номер отсчета сигнала, включая нулевой отсчет ( n = 0, 1, 2, …); M и N – большее из чисел является порядком ЦФ; ai , bk – коэффициенты ЦФ.
Согласно приведенному уравнению линейный рекурсивный ЦФ при канонической форме реализации (с минимальным количеством элементов задержки) представляет собой последовательное соединение двух фильтров (рисунок 6) – фильтра с бесконечной импульсной характеристикой (БИХ-фильтра), соответствующего рекурсивной части уравнения с коэффициентами bk, которая работает с «прошлыми» значениями выходного сигнала, и фильтра с конечной импульсной характеристикой (КИХ-фильтра), соответствующего нерекурсивной части уравнения с коэффициентами ai, ограниченной в работе текущими и «прошлыми» значениями входного сигнала.
В таком ЦФ цифровые данные D ацп с выхода АЦП в виде входного сигнала x [ n ] поступают на вход БИХ-фильтра и преобразуются в промежуточные цифровые данные D п , затем с выхода БИХ-фильтра эти данные в виде промежуточного сигнала s [ n ] передаются на вход КИХ-фильтра и преобразуются в цифровые данные D цф , поступающие с выхода ЦФ в виде выходного сигнала y [ n ]. Последовательная обработка цифровых данных БИХ-фильтром и КИХ-фильтром происходит на рабочей частоте F , поступающей в ЦФ из УСЦД совместно с другими сигналами управления СУ2, обеспечивающими синхронизацию процесса ЦОС в заданном интервале времени измерения ∆ t изм .
Далее после завершения процесса ЦОС усредненные цифровые данные D цф передаются в УСЦД для формирования с выхода УСЦД массива усредненных цифровых данных D усцд по всем опрашиваемым каналам за текущий цикл измерений T ци .
Последовательное соединение БИХ-фильтра и КИХ-фильтра, характеризуемых передаточными функциями H бих ( z ) и H ких ( z ), обеспечивает в ЦФ реализацию алгоритмов ЦОС в соответствии с общей передаточной функцией
Hцф(z) = Hбих(z)Hких(z), где z = epT, p = j2πfп, fп – частота помехи, Т – интервал дискретизации.
Требуемый вид графиков зависимостей амплитудно-частотной и фазо-частотной характеристик передаточной функции Hцф(z) и, соответственно, эффективность ЦОС в заданных условиях эксплуатации на заданном интервале времени измерения ∆tизм определяются расчетными значениями параметров ЦФ (n, F, M, N, ai, bk), которые обычно при разработке алгоритмов ЦОС в ПЛИС задают фиксированно. Однако в случае изменения условий эксплуатации ИМКТ для обеспечения гибкой настройки характеристик ЦФ и модифицирования способа ЦОС возможно значения коэффициентов ai и bk и рабочей частоты F задавать программными средствами ЦПМ. В таком случае в состав ЦФ помимо БИХ-фильтра и КИХ-фильтра потребуется дополнительно ввести устройство задания параметров, в которое при обмене информацией ИМКТ с ЦПМ через КИ будут записываться новые значения параметров [17].
Следует отметить, что в условиях сложной ЭМО на КА в отдельных случаях (например, при возникновении ЭСР) возможно проникновение в измерительный тракт ИМКТ нерегулярных импульсных помех, которые в пределах заданного цикла измерений Т ци даже при принятых дополнительных мерах по ослаблению помех в аналоговых и цифровых устройствах могут вызвать в процессе опроса каналов на интервале времени измерения ∆ t изм либо недопустимое кратковременное увеличение фиксированного смещения напряжения на входе АЦП, либо недопустимую нестабильность логических уровней сигналов. В обоих случаях это приведет к формированию на выходах цифровых устройств недостоверных цифровых данных, в результате чего могут возникнуть грубые ошибки измерений (промахи). Использование ЦФ для усреднения результатов измерений при многократных измерениях на ограниченном интервале времени измерения ∆ t изм не всегда может обеспечить устранение промахов в цифровых данных D цф на выходе ЦФ, поэтому при завершении цикла измерений Т ци сохраненный в УСЦД массив усредненных цифровых данных D усцд может быть передан из ИМКТ в ЦПМ с грубыми ошибками.
Однако, учитывая нерегулярный характер проникающих в измерительный тракт ИМКТ импульсных помех, в периодически передаваемых в ЦПМ массивах усредненных цифровых данных D усцд на промежутке времени, ограниченном несколькими циклами измерений Т ци , в каждом канале измерения могут возникать только одиночные промахи, возможно их исключение из результатов измерений при дальнейшей обработке цифровых данных [18]. Для этого дополнительно прибегают к специальным статистическим методам обработки цифровых данных, позволяющим производить анализ нескольких массивов усредненных цифровых данных D усцд на достоверность по заданным критериям при малом числе измерений (обычно для уменьшения суммарного времени измерений при анализе цифровых данных на достоверность ограничиваются минимум 3–5 массивами), которые реализуются программными средствами ЦПМ на уровне проектирования измерительного прибора.
Заключение
Проведенный анализ воздействующих на аналоговые и цифровые устройства ИМКТ внешних кондуктивных и электромагнитных помех, которые проникают по шинам питания, по входным цепям каналов измерения, по интерфейсу ППИ и по внутренним цепям аналоговых и цифровых устройств, показал, что для их ослабления на уровне проектирования ИМКТ кроме общих конструктивных мер, обеспечивающих образование непрерывной экранирующей оболочки, следует принимать дополнительные меры:
– для ослабления помех, проникающих по шинах питания аналоговых и цифровых устройств, следует использовать как общий ПФ, подключаемый к входным шинам питания ИМКТ, так и фильтры или конденсаторы развязки на каждом активном устройстве, подключаемые к шинам питания как можно ближе к этим устройствам;
– для ослабления синфазных и дифференциальных помех, проникающих по входным цепям каналов измерения ИМКТ, следует использовать как ИУ с большим КОСС, так и ПФ в каждом аналоговом устройстве, ограничивающие полосу пропускания усилительного тракта ИМКТ;
– для ослабления синфазных помех на общей шине питания в ЭПТ, проникающих во внутренние цепи аналоговых и цифровых устройств через основание корпуса рамки ИМКТ, следует использовать помехоподавляющий RC -фильтр, подключаемый между общей шиной питания и корпусом рамки ИМКТ;
– для ослабления наведенных помех во внутренних сигнальных цепях аналоговых и цифровых устройств, вызванных проникновением помех через паразитные емкости с основанием корпуса рамки ИМКТ, а также проникновением электромагнитных помех, вызванных энергией вторичного электромагнитного поля во внутреннем пространстве корпуса рамки ИМКТ, следует использовать электростатические экраны, выполненные в виде сплошного проводящего слоя общей шины питания (полигона) в многослойной печатной плате, и в виде местных экранирующих крышек, подключенных к общей шине питания, или специальной экранирующей конструкции основания корпуса рамки в области размещения наиболее чувствительных элементов.
Кроме того, для уменьшения случайной составляющей погрешности измерения, вызванной фиксированным случайным отклонением (смещением) напряжения на входе АЦП от точного значения, в ИМКТ при опросе каналов дополнительно следует производить многократные измерения и полученные с выхода АЦП для каждого канала цифровые данные о результатах измерений усреднять с помощью ЦФ.
Также для исключения из переданных из ИМКТ в ЦПМ для дальнейшей обработки массивов усредненных цифровых данных возможных одиночных грубых ошибок измерений (промахов), которые в условиях сложной ЭМО на КА могут возникать на интервале времени в пределах нескольких циклов измерений, дополнительно сле-
Том 8
дует прибегать к специальным статистическим мых программными средствами ЦПМ на уровне методам обработки цифровых данных, реализуе- проектирования измерительного прибора.
Список литературы Меры по ослаблению помех на уровне проектирования интерфейсного модуля контроля температур для измерительных приборов космических аппаратов
- Горностаев А.И. Особенности обеспечения помехоустойчивости интерфейсных модулей контроля температур в измерительных приборах космических аппаратов // Космические аппараты и технологии. 2021. Т. 5. № 2. С. 89–101. doi: 10.26732/j.st.2021.2.04.
- Горностаев А.И. Меры по ослаблению помех на уровне проектирования измерительной системы космических аппаратов // Космические аппараты и технологии. 2022. Т. 6. № 4. С. 287–302. doi: 10.26732/j.st.2022.4.08
- Горностаев А.И. Меры по ослаблению помех на уровне проектирования измерительного прибора космических аппаратов // Космические аппараты и технологии. 2023. Т. 7. № 4. С. 268–278. doi: 10.26732/j.st.2023.4.05
- ОСТ 92–1615–2013. Микросхемы интегральные и приборы полупроводниковые. Общие требования по защите от статического электричества. Зарегистрирован в ЦКБС ФГУП ЦНИИ машиностроения. 2013.
- Ромадина И. Электронные компоненты компании ON Semiconductor для защиты электрических цепей от импульсного перенапряжения // Компоненты и технологии. 2009. № 12. С. 73–76.
- Малинова О.Е. Классификация средств внешней защиты электронных схем от ЭСР // Труды международного симпозиума «Надёжность и качество». 2016. Т. 1: С. 110–115.
- Белик Г.А. Метод повышения устойчивости печатных узлов БРЭА космических аппаратов к возникновению ЭСР: дисс. … канд. техн. наук: 05.12.04. М. 2013. 123 с. [Электронный ресурс]: URL: hse.ru/ data/2014/02/10/1341505747/belik_dissertacia_f.pdf (дата обращения: 14.01.2024).
- Горностаев А.И. Проблемы унификации многоканального интерфейсного модуля контроля температур для измерительных приборов космических аппаратов // Космические аппараты и технологии. 2019. Т. 3. № 1. С. 41–51. doi: 10.26732/2618-7957-2019-1-47-57.
- Горностаев А.И. Оптимизация структуры унифицированного многоканального интерфейсного модуля контроля температур для измерительных приборов космических аппаратов // Космические аппараты и технологии. 2019. Т. 3. № 3. С. 171–183. doi: 10.26732/2618-7957-2019-3-171-183.
- Денисенко В. Повышение точности путем многократных измерений. Часть 1 // Современные технологии автоматизации. 2009. № 4. С. 96–99.
- Денисенко В. Повышение точности путем многократных измерений. Часть 2 // Современные технологии автоматизации. 2010. № 1. С. 98–102.
- Понятие 1/f-шума и методы его устранения [Электронный ресурс]. URL: radioprog.ru/post/868 (дата обращения: 14.01.2024).
- Паразитные эффекты в конденсаторах [Электронный ресурс]. URL: reom.ru/stati/7/ (дата обращения: 14.01.2024).
- Александров В. Как снизить электромагнитные помехи при проектировании? // Электронные компоненты. 2011. № 3. С. 10–13.
- Рентюк В. Дополнительные конструктивные элементы помогают решать проблемы ЭМС // Компоненты и технологии. 2021. № 8. С. 90–96.
- Курячий М.И. Цифровая обработка сигналов: учеб. пособие для вузов. Томск: Томск. гос. ун-т систем упр. и радиоэлектроники. 2009. 190 c.
- Тульский И.Н., Власова Ю.Е. Устройство обработки аналоговых сигналов с применением цифровой фильтрации. Пат. № 2777306, Российская Федерация, 2022. Бюл. № 22.
- Руди Д.Ю., Попова М.В., Петров С.И. Грубая погрешность и критерии их исключения [Электронный ресурс]. URL: elar.urfu.ru/bitstream/10995/40261/1/eksie_2016_49.pdf?ysclid=lrc3zhb4iy400569740 (дата обращения: 14.01.2024).
