Methods of agents control in multi-agent expert system

Author: Aripova O.V., Guschin A.N.
Journal: Сибирский аэрокосмический журнал @vestnik-sibsau
Section: Математика, механика, информатика
Article in issue: 7 (33), 2010.
Free access
In the article we discuss the user models interacting with distributed network resource, where every user has a correlated agent, as well as on the methods of multi-agent expert system control.
Expert system, agent, interaction, behavior, control
Short address: https://sciup.org/148176420
IDR: 148176420
Text of the scientific article Methods of agents control in multi-agent expert system
The administration of distributed network resources requires solving tasks, concerned with the complexity of resource-to-user interaction organization.
To solve the set task [1] the following multi-agent expert system (fig. 1) has been developed.
To organize interaction between users and distributed network resource on a basis of the developed multi-agent expert system model we will consider the following models of agent’s behavior coordination [2–6]:
-
1. Game-theory modes – solve the tasks of selection solutions in conditions of equivocality and conflict, which if followed, allow the constructing of rule sets and conversations, permitting agents to achieve equilibrium agreements.
-
2. Models of collective behavior for automats – are based on constructing conversation rules and protocols in tasks, which are characterized by a large quantity of simple interactions with indeterminate characteristics.
-
3. Models of collective behavior planning reveal methods of agent behavior planning (centralized, partially centralized, distributed) for the purpose of making decisions regarding the selection of self-actions in the process of implementing the plans’ coordination.
-
4. Models based on BDI -architecture – apply axiomatical methods of the game theory and the artificial intellect’s logical paradigm. The task of the agents’
-
5. Models based on competition – imply the “auction” concept as a mechanism of the agents’ behavior coordination. The concept is based on a postulate regarding the possibility of undisguised transfer of “usability” from one agent to another, or to the agentauctioneer.
coordination behavior consists in coordinating the output results in the knowledge bases of these agents, obtained for the current state of external environment.
On the interaction assumption with distributed network resource, the following subpopulations were segregated from the full set of users U: А – administrators subpopulation (fig. 2), E – experts subpopulation, RU – registered users (fig. 3), GU – guest users (fig. 4). Since data regarding candidate users is formed on the base of processing information received from experts, who also have a right to influence all aspects of expert system functioning, the following assumption was made: the authentication of subpopulation U by agents is unviable. We shall build the behavior models for segregated users.
The following agent types were associated with all the user classes: for each guest user GU i – reactive agent RAGU i (fig. 5), for each registered user RU i – reactive agent RARU i (fig. 6), for each user-administrator А i – intellectual agent IАА i (fig. 7).
Fig. 1. Model of a multi-agent expert system
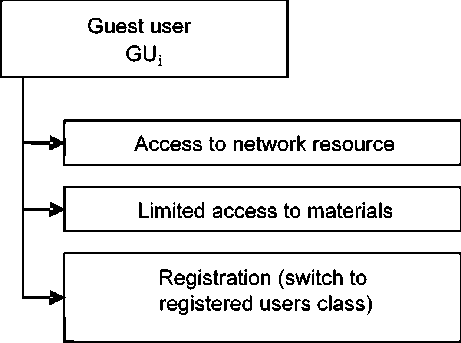
Fig. 2. Guest user behavior model
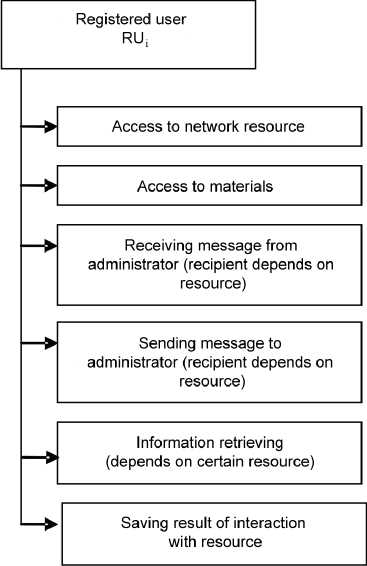
Fig. 3. Registered user behavior model
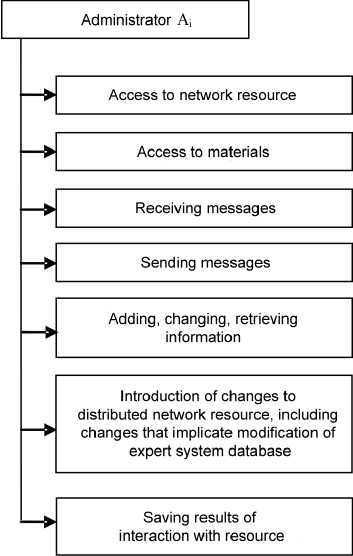
Fig. 4. Administrator behavior model
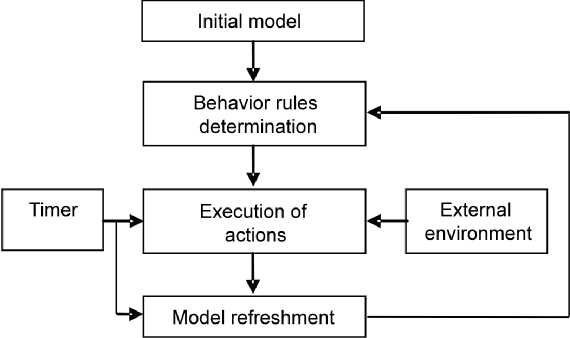
Fig. 5. Model of guest user agent “life cycle”
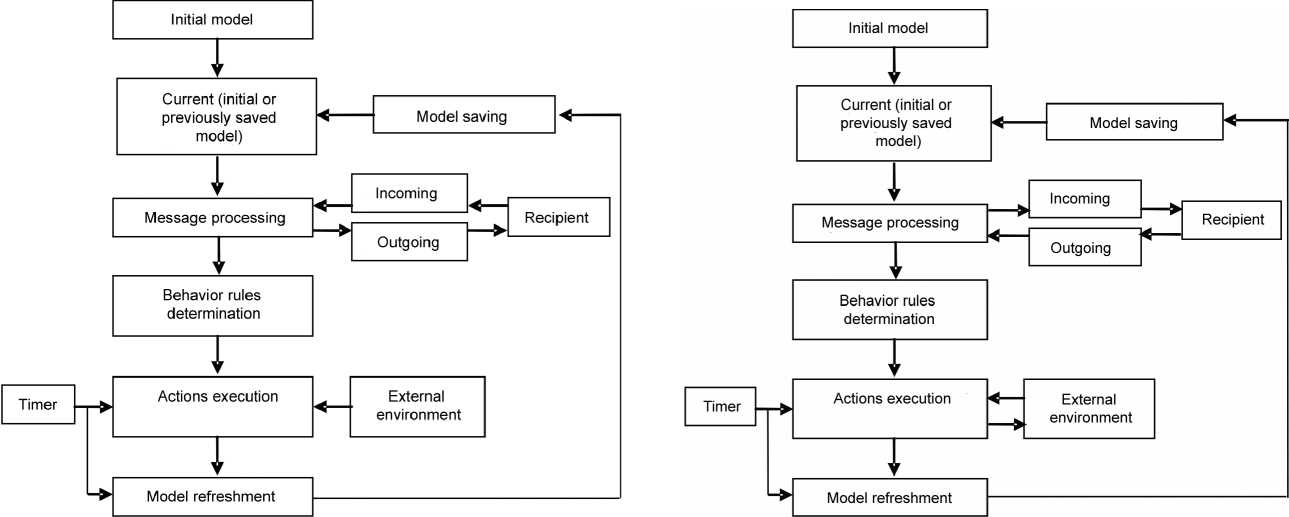
Fig. 6. Registered user agent “life cycle” model
Fig. 7. Administrator agent “life cycle” model
In addition to the interaction with distributed network resource it is necessary to organize relations between existing agents, whose main features are directedness, selectiveness, intensity, and dynamism. It is essential to consider the finiteness of existence time for every agent, and the influence of the agent’s behavior within the applied materials, located in a distributed network resource.
We shall consider requirements for agents [2; 3], correlated to each users subpopulation (see tablе).
Requirements for user agents
|
Characteristics |
Agent type |
||
|
RAGU |
RARU |
IAA |
|
|
Independent execution |
+ |
+ |
+ |
|
Interaction with other agents |
+ |
+ |
+ |
|
Reactivity |
+ |
+ |
+ |
|
Adaptive behavior |
+ |
+ |
|
|
Education based on interaction with environment |
+ |
+ |
|
|
Tolerance towards mistakes and/or improper input signals |
+ |
||
|
Real-time functioning |
+ |
||
|
Life cycle finiteness |
+ |
+ |
+ |
|
Persistence of behavior in expert system DB |
+ |
+ |
|
Due to the fact that reactive agents do not possess complex knowledge of the environment and are fully dependent on the objective (used to compose reactions for the designed situations and are also independent and have finitesimal life cycle), we can consider the definition of their functioning based on the production systems with an imperative kernel. In this case every agent possesses a rule set R = { r 1 ,...,r i ,...,r n } , which has the following structure:
r:p;a, ^bi, here a ^ b - is the kernel, which is the basic component of production and is interpreted as “if а, then b”, а – is inference b existence conditions ; i – name, which allows to identify the present production from the production set; pi – constraint of kernel production usability (predicate): if p – true, the kernel is actuated.
Let us assume that for the reactive agent:
a=V (tak), where a jk – explicit predicate over state S of agent ajk = ajk (S), S = {si,...,sj}, si, sj — state parameters.
Example:
-
– WHEN user = registered user;
-
– AND logon to distributed network resource;
-
– IF unread messages are in presence;
-
– THEN user is invited to review messages.
Thereat the intellectual agent requires a change in the structure of rules, videlicet the replacement of the kernel with an optional one, having an estimation of implementation on the base of fuzzy logic and introducing the following tail conditions to the structure:
r: p,; a, ^ b,; n, here n – are tail conditions for – is production. Let us assume that for the intellectual agent:
a (S) = v (^ajk (S)) ^ fiXS) = max(minfijjk (S)), jk j k where f(S) – is the membership function, dependent on predicable truth, as follows: f, (S) = 0 ^ b, - false, f, (S) = 1 ^ b, - true. For definiteness of change in the agent state we shall introduce fcutoff for which fa, (S) > fcutoff ^ b, - is true and the tail condition n is fulfilled.
Example:
-
– IF unread messages are in presence;
-
– AND these are not urgent;
-
– AND NOT (administrator is busy);
-
– WHEN with fcuto ff = 0,75: offer to show messages to the administrator;
-
– TAIL CONDITION = show messages to the administrator;
-
– IF unread messages are in presence;
-
– AND these are urgent;
-
– AND NOT (administrator is busy);
-
– WHEN with f cutoff = 0,1 show messages to the administrator;
-
– TAIL CONDITION = show messages to the administrator.
Such requirements allow coordinating of the agents’ behavior using a model based on BDI -architecture, since such concepts as beliefs, desires , and intentions are accentuated. Logical inference in knowledge bases is done directly in the process of agent functioning.
Multi-agent expert system, based on a hybrid architecture, with the use of two types of agents: intellectual, for the administrator subpopulation and reactive, for the subpopulations of registered and guest users, should implement reflexive control over distributed a network resource, the task of which is to make users consciously fall under external influence (i. e. to externalize such desires and intentions, which correspond to the environment).
We understand reflexive control as:
-
– the actualization of socially significant demands;
-
– the generation of a set of unique administrative concepts and relations;
– the realization of an activity set, particularly by means of engaging specialists (experts) to take part in the concept interpretation.
The expert system itself is based on the production model with fuzzy logic [7], where the agents’ behavior modeling subsystem is used as a potential argument for predicates in antecedent rules, (the observed agents’ behavior can be used in the rules of the expert system, but it can only be influenced by environmental change).
Let us assume that Sa – is the agent’s state, Sv – is the observed agents state, S e – is the expert system state, S r – is the distributed network resource state;
R ={r ,...,r ,...,r } - is the set of rules possessed ee1 eien by an expert system of type ri : pe,; aei ^ b; n , where aei(Se) – is the existence condition for inference bei, moreover Se includes S„ (S„ = |S„ ,S„ ,...,S ,...,S„ )), e v vv1pv2 vivn
Sv c Sa ( Sv c Se ), b j - are the results of redefinition of S e , which again can result in redefinition of S r . As far as S r can cause change of the user’s behavior (this changes environment influencing of the agent’s behavior), which, again is observed by the expert system; videlicet behavior of user at a moment of time t 1 (beginning of the expert system operation) results in changes of distributed network resource at a moment in time t 2 and in possible subsequent behavior of user at a moment in time t 3 and so on (Пд – behavior):
s r = ^ s r — 1 , s en — 1 Пд tn - i ^ s r — 2 ( s r — 3 , s en - 3
Пд In - 3 X
×
( s rn - 4 ( ... ( s r 2 , s e 2 Пд • 2 ( s r 1 ) ) ) ) )
A model of interaction between distributed network resource and users has now been developed. Its main peculiarity is the use of the multi-agent expert system. Methods of agent management allow the rationalization of the present interaction by means of the user’s behavior reflexive control via dynamic modifications in the representation and the content of network resource.
On the base of educational the following resource ( the present methods are applicable for tasks of interaction between organizations, distributed network resources, and the user. They have also been applied to instruments measuring and monitoring radiation levels, which had been affirmed by implementation acts.
