Метод аналитического исследования влияния сухого трения на поведение авторегулируемых динамических систем

Автор: Шамберов В.Н.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Оригинальные статьи
Статья в выпуске: 3 т.13, 2003 года.
Бесплатный доступ
Рассматривается проблема влияния сухого трения в элементах приборных механизмов на возникновение автоколебательных режимов. Задача решается аналитически с использованием вырожденных динамических моделей элемента с трением.
Короткий адрес: https://sciup.org/14264307
IDR: 14264307 | УДК: 681.5.01:
Method of analytical research into the influence of dry friction on dynamic behaviour of automatic control systems
The problem of dry friction impact on autooscillations appearing in adjusting devices is considered. It is solved analytically using singular dynamic models of the elements with dry friction.
Текст научной статьи Метод аналитического исследования влияния сухого трения на поведение авторегулируемых динамических систем
Большинство технических устройств, в том числе и приборов, можно отнести к замкнутым ав-торегулируемым динамическим системам. Практический и научный интерес представляют случаи возникновения автоколебаний в таких системах. Возникновение автоколебаний часто связано с проявлением сухого трения в механических элементах этих систем.
Сухое трение не имеет до сих пор вполне достаточного физического объяснения. В связи с этим при решении вопросов анализа и синтеза технических систем трение не всегда корректно учитывается в их динамических моделях, что не позволяет понять и объяснить причины возникновения нежелательного динамического поведения.
Качественный учет физически существенных черт в изучаемом явлении часто позволяет перейти к более простой модели, тем не менее правильно отражающей основные закономерности явления, что делает возможным проведение аналитического исследования.
Учет сухого трения в элементах систем переводит систему в разряд сильно нелинейных. Исследование многомерных нелинейных систем возможно в основном лишь средствами вычислительного эксперимента. Однако зависимость поведения системы от начальных условий и возможность возникновения в системе сложных динамических режимов делает вычислительный эксперимент недостаточно эффективным.
Излагаемый ниже подход позволяет в некоторой степени преодолеть этот барьер, дав исследованию предварительную информацию (полученную на основе точных методов) о возможном поведении системы для определенной области значений ее параметров (коэффициентов) и сделать дальнейшие исследования (уже другими методами) более эффективными.
МОДЕЛИРОВАНИЕ ДИНАМИКИ ЭЛЕМЕНТА С ТРЕНИЕМ
Основными составляющими сил сухого трения (Fг.тр.) являются сила трения покоя (Fтр 0) и сила трения скольжения (F(Y)трск). Переход от покоя к скольжению происходит через предварительное смещение, при котором наблюдается наибольшая сила трения покоя [1]. В настоящее время определены устойчивые закономерности в законе сухого трения:
-
а) сила трения покоя больше силы трения скольжения;
-
б) переход от покоя к скольжению сопровождается скачкообразным уменьшением силы трения;
-
в) сила трения покоя увеличивается с увеличением времени неподвижного контакта;
-
г) с увеличением скорости скольжения ( Y ) сила трения скольжения уменьшается.
Математической моделью закона сухого трения может служить описание:
|F с.тр.| < F Ф.о > если Y = 0;
• ее
Fcp.=-F(Y) тр.к.Slgn(Y), если Y * 0, где F(Y) трск — монотонно убывающая функция от Y, характеризуемая максимальным значением
минимальным значением
F ( Y ) тр.ск. ^ F тр.шт при |Y| ^“ ;
максимально отрицательным наклоном — коэффициентом k ' =- ( d ( F ( Y ) тр.с к . ) /d Y ) Y |^ 0 • Sign ( Y ), где F п > F > F > 0
-
1 д^ тр.0 тр.ост. — mp.min — ^-
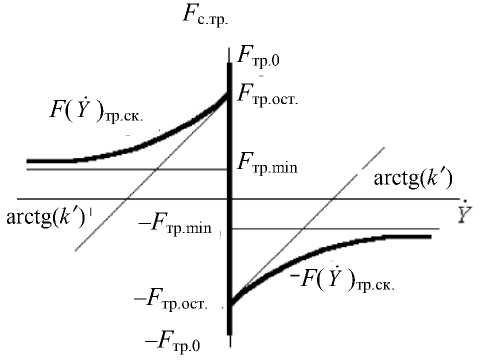
Рис. 1. Модель закона сухого трения
Долгое время практика учета трения в механических элементах ориентировалась на его простейшие идеализации, что не позволяло получить новые знания об исследуемом явлении и выработать допускающие обобщения концепции.
Динамическую модель элемента с трением с учетом принятого закона сухого трения (1) можно получить на основе принципа динамического равновесия Даламбера (масса вызывает силу инерции, пропорциональную ускорению и противоположно ему направленную):
mY = 0, если Y = 0 и cY + F < Fтр.0;
-
• • • • •
mY + kY + F(Y )с . тр . ск . Sign( Y ) + cY + F = 0, если Y ^ 0;
mY + kY + FTp.0 Sign(cY + F) + cY + F = 0, если Y = 0 и cY + F| > Fтр.0, где m — масса подвижной части элемента с трением; k — коэффициент, характеризующий вязкое трение в элементе; с — коэффициент, характеризующий упругие силы сопротивления движению; F — внешнее воздействие. Вид фазового портрета, полученного по уравнениям (2) при m < 0.25k2 / c, существенно зависит от соотношения коэффициентов k , k' (рис. 2, 3).
Для рассматриваемых практических случаев значение коэффициента m пренебрежимо мало.
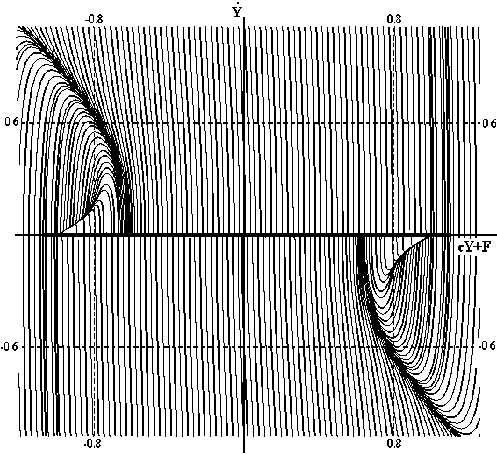
Рис. 2. Фазовый портрет элемента с трением при m < 0.25 k 2/ c и k < k'
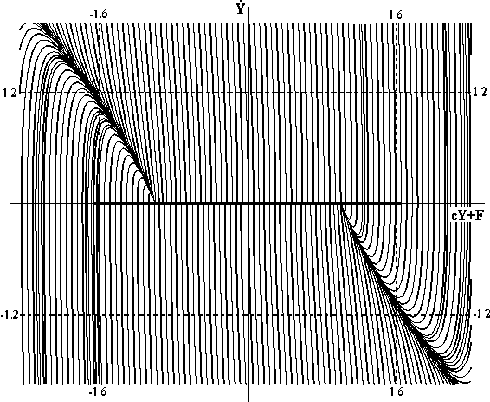
Рис. 3. Фазовый портрет элемента с трением при m < 0.25 k 2/ c и k > k'
В предельном случае (m = 0) движения разделяются на быстрые и медленные. При k < k' на фазовом портрете системы существуют участки неустойчивых медленных движений, которые на практике не реализуются. Любое быстрое движение переводит систему либо на отрезок равновесия, либо на устойчивое медленное движение. Законность такого рассмотрения, известная ранее как "гипотеза скачка", основывается на доказательствах А.Н. Тихонова, Л.С. Понтрягина, Е.Ф. Мищенко и др. в теории релаксационных колебаний [2].
Полагая, что исходные состояния системы всегда принадлежат либо отрезку равновесия, либо устойчивому медленному движению, аппроксимируя медленные движения на фазовой плоскости линейными отрезками, можно получить математические модели элемента с трением класса кусочнолинейных неоднозначных динамических систем (рис. 4, 5).
Для некоторых элементов помимо массы можно пренебречь также и силами вязкого трения. Получить вырожденную модель ( m = 0, к = 0), сохранив в ней все качественные особенности сухого трения, возможно лишь при c > 0. При этом математическое описание модели будет следующим:
cY , если cY- + f| < F^;
cY = ^
- F - Fр mn Sign(cY" + FX если cY- + F > FГр.о, где cY- — предыстория состояния элемента с трением. Геометрическая интерпретация поведения модели (3) при гармоническом входном воздействии представлена на рис. 6.
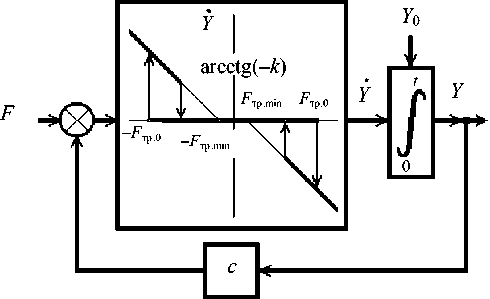
Рис. 4. Динамическая модель элемента с трением при m = 0 и к < к'
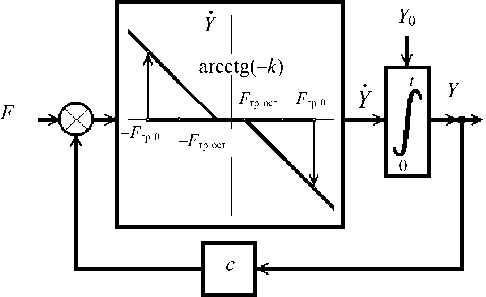
Рис. 5. Динамическая модель элемента с трением при m = о и к > к'
Y
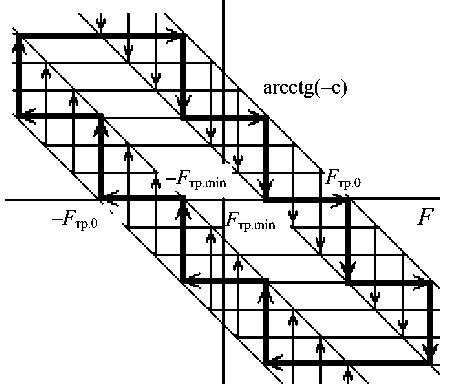
Рис. 6. Динамическая модель элемента с трением при m = о и к = 0
ИССЛЕДОВАНИЕ МНОГОМЕРНЫХ ДИНАМИЧЕСКИХ СИСТЕМ С СУХИМ ТРЕНИЕМ
Применение метода рассмотрим на примере системы, динамика которой может быть представлена следующей математической моделью в векторно-матричной форме:
x = A х x + B x v , y = C x x + D x v , (4)
v = N ( y ).
Здесь x , x — векторы переменных размерности n x 1; A , B , C — матрицы вещественных коэффициентов размерности n х n , n x m и m x n соответственно; D — диагональная матрица вещественных коэффициентов размерности m x m ; v , v , y — векторы переменных размерности m x 1; N ( y ) — вектор нелинейных функций размерности m x 1. В общем случае n > m > 2. Составляющие вектора v — переменные v 1 , v 2,..., vm — определяются кусочно-линейными функциями n 1 ( y 1 ), n 2( У 2 ), ••• , n m ( y m ) вида:
0, при | y | < h и n ( y ) = 0;
n ( У ) = -
У , при | y | > h
и n ( y ) = 0
или при n (y) ^ 0, где h > 0 — положительный коэффициент, характеризующий величину силы трения покоя; n - (у) — предыстория функции n(y). Составляющие вектора N(y)— характеризуемые описанием (5) нелинейности ni(yi), n2(у2), ..., nm(ym) — определены качественным учетом сухого трения в виде силы трения покоя, существующего до момента начала движения при пренебрежении инерционными свойствами элемента с трением, и силами трения скольжения (см. рис. 5).
Для простоты рассуждений рассмотрим систему (4) при n = m = 2 , для которой применим метод, заключающийся в том, что в пространстве параметров системы определим области (сечения), для которых о поведении исходной системы высокого порядка (в данном случае четвертого) с двумя нелинейностями вида (5) можно судить по поведению нескольких (для данного рассмотрения четырех) имеющих одинаковую структуру подсистем второго порядка с одной нелинейностью (5) в каждой. Будем считать, что собственные числа Х1, Х2 матрицы A — ненулевые, вещественные, различные и определены, а значения коэффициентов матриц B, C могут выбираться. Линейным преобразованием x = M x g (где M — модальная по отношению к A неособенная матрица) система (1) приводится к виду g = Л x g + B m x v, v = N(yX (6)
y = C m x g + D x v, где g = M "1 x x — вектор-столбец новых переменных, Л = M-1 x A x M —матрица Жордана, B m = M-1 x B, C m = C x M . Преобразование не должно приводить к появлению в Bm нулевых строк. Коэффициенты матриц B m и C m определяются как:
bm 11 = (m 22 b11 - m 12 b 21)/det M, bm 12 = (m22 b12 - m12b22)/det M, bm 21 = (m11 b 21 - m 21 b11)/det M bm 22 = (m 11 b 22 - m 21 b12)/det M cm 11 = c11 m11 + c12 m 21, cm 12 = c11 m12 + c12 m 22, cm 21 = c21 m11 + c22 m21, cm 22 = c21 m12 + c22 m22.
Линейное преобразование приводит систему к желаемой системе координат (при этом в системе исчезает n ( n - 1) связей), что позволяет проще выявить ее свойства. Данный прием широко использовался при решении нелинейных задач теории автоматического регулирования [3] для одномерных систем.
Поскольку коэффициенты матриц B , C могут в какой-то степени изменяться (выбираться), возможна ситуация, когда определенная часть коэффициентов матриц B m и C m принимает значения, равные нулю (при этом структура исходной системы (4) не изменяется).
Идея аналитически точного исследования динамики нелинейной системы произвольного порядка с помощью фазовой плоскости теоретически была разработана в работах [4, 5].
Назовем сечением 1 условие bm 21 = cm 21 = 0. При этом система (6) может быть представлена двумя подсистемами второго порядка:
-
g 1 = A g 1 + b m 11 V 1 + b m 12 V 2 ,
i = n 1 ( У 1 ),
У 1 = c m 11 g 1 + d 11 V 1 + c m 12 g 2 ;
-
g 2 = ^ 2 g 2 + b m 22 V 2 ,
-
i, 2 = n 2 ( У 2 ),
-
У 2 = c m 22 g 2 + d 22 V 2 .
Одна из подсистем оказывает внешнее воздействие на другую подсистему в силу ненулевых значений коэффициентов bm 12 , cm 12 , а другая подсистема не оказывает обратного воздействия в силу нулевых значений коэффициентов bm 21 , cm 21 . Соответствующим образом получаем еще три сечения.
Сечение 2: ( b m 11 = c m 11 = 0). Система (6) приводится к виду
-
g 1 = Я 1 g 1 + b m 12 v 2 + b m 22 v 1 ,
v ! = n 2( y 2 ),
У 2 = c m 21 g 1 + d 22 v 2 + c m 22 g 2 ;
g2 = X2 g 2 + bm 21 v1, v = n1( У1X
У 1 = c m 12 g 2 + d 11 v P
Сечение 3: (bm 12 = cm 12 = 0). Система (6) приводится к виду g1 = Я1 g 1 + bm 11 v 1, v = n1( У1X
У 1 = c m 21 g 1 + d 11 v 1 ;
g 2 = Я 2 g 2 + b m 21 v 2 + b m 21 v 1 , v 2 = n 2( У 2 ),
У 2 = c m 12 g 2 + d 22 v 2 + c m 21 g P
Сечение 4: (bm22 = cm22 = 0). Система (6) приво- дится к виду g1 = Я1 g 1 + bm 12 v2, v2 = n 2( У 2),
У 2 = c m 21 g 1 + d 22 v 2 ;
g2 = Я2 g 2 + bm 21 v 1 + bmn v2, v = n 1( У1),
У 1 = c m 12 g 2 + d 11 v 1 + cm11 g 1 -
Рассмотренные подсистемы характеризуются своими параметрами Я, bm, d, cm, нелинейностью n (у) и имеют одинаковую структуру g = ^g + bmv,
V > = n ( y ), (7)
У = c m g + dv .
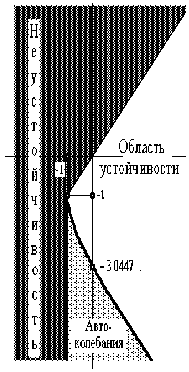
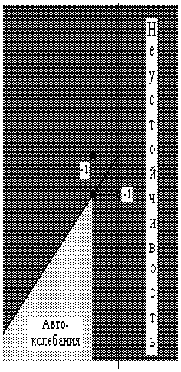
Система (7) с функцией i > = n ( y ) вида (5) была исследована методом точечных отображений [6], при этом были получены необходимые и достаточные условия качественно различного динамического поведения. Структура разбиения пространства параметров Я , bm , d , c m на области различного динамического поведения показана на рис. 7.
а
bmcm
Я2
d
Я
bmcm
Я2
d
Я
б
Рис. 7. Структура разбиения пространства параметров системы (7). а — для X < 0, б — для X > 0
Допустим, что вязким трением в элементах с трением можно пренебречь ( к = 0 ) . В этом случае описание (4) принимает следующий вид:
x = A х x + B x v ( y ), y = c x x ,
где составляющие вектора v ( y ) — нелинейные функции V i( у , ), V 2( y 2) ,..., v m ( У т ) вида
V ( у ) = -
v ( у ), если
у ,
если
| v ( У Г - у | < h ;
| v - ( У ) - у | ^ h .
g 1 = 2 1 g 1 + b m 12 V 2( У 2 ),
У 2 = c m 21 g 1 ;
g 2 = 2 2 g 2 + b m 21 V 1( У 1 ) + b m 11 V 2( У 2 ),
У 1 = c m 12 g 2 + cm 11 g 1 .
В условиях сечений о динамическом поведении системы (10) и соответственно системы (8) можно судить по динамическому поведению подсистем вида
При этом V ( у ) — предыстория состояния элемента с трением (см. рис. 6).
Аналогичным преобразованием (при 2 ,1 ^ Х 2 ) система приводится к виду
g = 2 g + b m v ( У ), У = c m g .
g = Л х g + B т х V ( y X y = C т х g . (10)
Как и в предыдущем случае, динамическое поведение системы (9) в условиях рассмотренных сечений (при n = m = 2) можно представить:
в сечении 1 ( b„ = с = 0) —
X m 21 m 21 7
g 2 = 2 2 g 2 + b m 22 V 2( У 2 ), У 2 = c m 22 g 2 ;
Для системы (11) с функцией v ( у ) вида (9) также получены необходимые и достаточные условия качественно различного динамического поведения. Структура разбиения пространства параметров 2 , bm , cm представлена на рис. 8.
В отношении системы (4) можно сделать следующие утверждения:
-
а) система в условиях сечений устойчива, если две соответствующие подсистемы устойчивы;
-
б) система в условиях сечений автоколеба-тельна, если одна из подсистем автоколебательна, а другая устойчива; автоколебания определяются автоколебательной подсистемой;
g 1 = 2 1 g 1 + b m 11 V 1( У 1 ) + b m 12 V 2( У 2 ),
-
У 1 = c m 11 g 1 + c m 12 g 2 ;
в сечении 2 ( b m 11 = c m 11 = 0) —
-
g 2 = 2 2 g 2 + b m 21 V 1( У 1 ),
-
У 1 = c m 12 g 2 ;
-
g 1 = 2 1 g 1 + b m 12 V 2( У 2 ) + b m 22 V 1( У 1 ),
-
У 2 = c m 21 g 1 + c m 22 g 2 ;
в сечении 3 ( b m 12 = c m 12 = 0) —
-
g 1 = 2 1 g 1 + b m 11 V 1( У 1 ),
-
У 1 = c m 21 g 1 ;
-
g 2 = 2 2 g 2 + b m 21 V 2( У 2 ) + b m 21 V 1( У 1 ),
У 2 = cm 12 g 2 + cm 21 g 1 ;
в сечении 4 ( b m 22 = c m 22 = 0) —
λ

bmcm
Рис. 8. Структура разбиения пространства параметров системы (11)
-
в) система в условиях сечения является автоколебательной, если обе подсистемы автоколеба-тельны;
-
г) судить о поведении системы в условиях сечения по поведению соответствующих подсистем нельзя, если хотя бы одна из них является неустойчивой.
Последнее утверждение связано с тем, что при рассмотрении сечений нулевые значения соответствующих коэффициентов не могут быть абсолютными.
ЗАКЛЮЧЕНИЕ
Развитие теории нелинейных динамических систем непосредственно связано с применением точных аналитических методов исследования. Основное достоинство строгого анализа это представление решения посредством математического выражения — обобщающей идеи, позволяющей перейти на более глубокий уровень понимания явления. Однако налицо и ограниченность такого метода, связанная с размерностью изучаемого динамического явления. Универсальным методом исследования можно было бы считать численные методы исследования с привлечением мощных средств вычислительной техники, если бы они (методы) обладали достаточной общностью и достоверностью представления результатов.
Современной технологией научного познания следует считать обоснованное сочетание точных аналитических методов с численными неаналитическими методами — вычислительный эксперимент. Рассматриваемый в работе метод позволяет эффективно использовать накопленный опыт изучения кусочно-линейных динамических систем невысокого порядка строгими качественными методами исследований применительно к исследованию многомерных динамических систем высокого порядка, осуществляемого средствами вычислительного эксперимента.
Список литературы Метод аналитического исследования влияния сухого трения на поведение авторегулируемых динамических систем
- Гаркунов Д.Н. Триботехника. М.: Машиностроение, 1985. 424 с.
- Мищенко Е.Ф., Розов Н.Х. Дифференциальные уравнения с малым параметром и релаксационные колебания. М.: Наука, 1975. 248 с.
- Лурье А.И. Некоторые нелинейные задачи теории автоматического регулирования (современные проблемы механики). М.-Л.: Гостехиздат, 1951. 216 с.
- Методы исследования нелинейных систем автоматического управления/Под ред. Р.А. Нелепина. М.: Наука, 1975. 448 с.
- Нелепин Р.А., Камачкин А.М., Туркин И.И., Шамберов В.Н. Алгоритмический синтез нелинейных систем управления/Под ред. Р.А. Нелепина. Л.: Изд-во ЛГУ, 1990. 220 с.
- Шамберов В.Н. Исследование типовой промышленной системы автоматического регулирования с некулоновой моделью сухого трения. Автореф. дис. … канд. техн. наук. Л.: ЛГУ, 1988. 16 с.
- Шамберов В.Н. Методы аналитического исследования влияния сухого трения на точность и качество авторегулируемых систем//Фундаментальные и прикладные проблемы теории точности процессов, машин, приборов и систем: Труды 5-й сессии Mеждународной научной школы (Фридлендеровские чтения). СПб.: Институт проблем машиноведения РАН, 2002. С. 93-100.
