Метод дифференциальной идентификации инерциальных объектов в случайных полях

Автор: Потылицын В.С.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 2 т.6, 2013 года.
Бесплатный доступ
Рассмотрены методы идентификации и обнаружения объектов в ионно-проводящих средах с использованием шумовых возмущений и случайных полей, в частности, для решения задач поиска полиметаллических руд с выделением информации из естественного электромагнитного поля Земли.
Вызванная поляризация, естественное электромагнитное поле земли, дисперсия, среднеквадратическое отклонение, неполяризующиеся электроды, теллурические токи
Короткий адрес: https://sciup.org/146114729
IDR: 146114729 | УДК: 550.837.73
Method of differential identification of inertial objects in random fields
Discusses methods to identify and locate objects on the ion-conducting media with noise disturbances and random fields, in particular for solving search problems polymetallic ores with the release of information from the natural electromagnetic field of the Earth.
Текст научной статьи Метод дифференциальной идентификации инерциальных объектов в случайных полях
Теоретическая основа метода идентификации объектов при входном возмущении в виде белого шума определена теоремой Винера о черном ящике [1]. Существо метода заключается в регистрации импульсной характеристики неизвестного объекта при входном возмущении в виде белого шума путем статистической оценки функции взаимной корреляции между наблюдаемым сигналом отклика и входным возмущением.
R xy ( τ ) = ∫ ∞ R xx ( t ) ⋅ K 0 ( t - τ ) ⋅ dt , (1)
∞ где R (t) – автокорреляционная функция входного шума (R (τ) = x(t) ⋅x(t-τ)⋅dt); K (t–τ) – -∞ импульсная характеристика исследуемого объекта.
Поскольку для белого шума R xx (τ) является дельта-фнкцией, то в силу фильтрующих свойств интеграла (1)
R xy ( τ )≈ A ⋅ K 0 ( τ ). (2)
Подобная задача возникает в различных применениях – определении динамических свойств объектов управления, технологических агрегатов, в геофизике при поиске месторождений полиметаллов, в медицине при оценке параметров трасс распространения радиоволн [2]. При этом зачастую входное возмущение является нестационарным случайным процессом по времени, спектру и пространству, что требует разработки модифицированного алгоритма по отношению (1).
В общем случае эта задача не решена, поэтому далее рассматриваются определения характерного параметра объекта идентификации максимально инвариантного относительно не-стационарности возмущающего случайного поля.
Физической моделью подобной задачи может быть проблема обнаружения подповерхностных объектов, например глубоко залегающих полиметаллических руд, путем обработки сигналов теллурических токов Земли, которые существенно нестационарны по пространству и времени.
Объект поиска относится к классу инерционных с передаточной функцией низкочастотного фильтра, характерным параметром которого является постоянная времени фильтра.
Используемый в практике электроразведки метод вызванной поляризации (ВП) для поиска полиметаллических руд на больших глубинах заключается в возбуждении двойного электрического слоя рудного тела – ионно-проводящей среды при помощи последовательных прямоугольных импульсов поляризующего тока, вводимого в геологический разрез при помощи заземленной длинной линии, питаемой от специального генератора. Однако этот метод труднореализуем в горно-таежной местности из-за необходимости использования достаточно мощных источников поляризующего тока и прокладки длинного кабеля. Этот метод по сути регистрирует переходную характеристику разреза двойного электрического слоя.
На основе использования случайных теллурических поля в диапазоне частот 1-20 Гц рассмотрим возможность получения той же самой информации, но без применения внешних электрических источников возбуждения генератора.
На рис. 1 приведена физическая модель рассматриваемой задачи.
Под действием теллурического тока, носящего случайный характер, перезаряжается граница раздела объекта и ионно-проводящая среда, представляющие собой емкость, за счет эффекта вызванной поляризации. Электропотенциалы вызванной поляризации вторичных токов металлсодержащего объекта регистрируются двумя смежными дифференциально включенными электрическими диполями в виде сигналов x(t) и y(t).
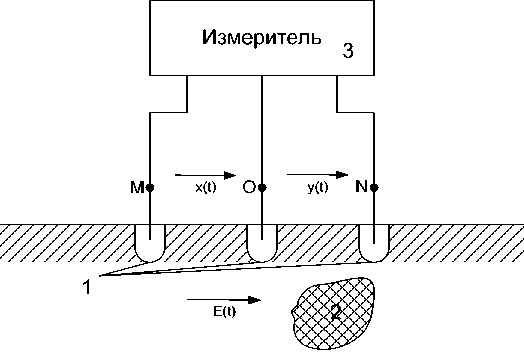
Рис. 1. Дифференциальная измерительная установка: 1 – электроды, 2 – рудное тело, 3 – измерительная установка
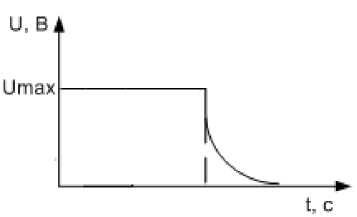
Рис. 2. Переходная характеристика георазреза
Импульсная характеристика процесса заряд-разряд границы раздела объекта со средой описывается формулой
K о (т ) = К 0 + A • K 0 • e -~. (3)
На рис. 2 представлена переходная характеристика георазреза, т.е. его отклик на воздействие одиночного однополярного импульса.
При отсутствии объекта поиска второй член (3) будет равен 0. В общем случае может быть поставлена задача идентификации объекта поиска по импульсной характеристике. При этом точность определения информационных параметров объекта А • K 0 и а должна быть не хуже 1 %. Однако для задачи обнаружения достаточно выделить некоторый информационный параметр, например энергию сигнала, определяемый членом (3).
Для минимизации пространственной нестационарности первичного возмущающего теллурического тока желательно, чтобы приемные электроды x(t), y(t) были наиболее близко расположены друг к другу. Будем считать, что сигнал x(t) полностью определяется первичным возмущающим током и находится вне вторичного поля объекта. Наоборот, сигнал y(t) искажен полем токов разряда объекта поиска и содержит информацию об информационной составляющей [3].
Для снижения влияния нестационарности поля возмущения по времени необходимо, чтобы сигналы x(t) и y(t) наблюдались одновременно. В этом случае информационные параметры А • K 0 и α будут содержаться в дисперсии их разности нормированной по дисперсии сигнала x(t) [4]:
j [ х ( t ) — У ( t ) ] 2 dt
5 2 = ------------ (4)
j х ( t )2 dt 0
Поскольку амплитуда случайных сигналов x(t) и y(t) неодинакова за счет нестационар-ности кажущегося сопротивления среды, то для реализации алгоритма (4) необходимо ввести адаптивную компенсацию разности за счет x(t)-y(t), которую можно реализовать путем введения некоторого коэффициента компенсации k , минимизирующего
T 2
j [ х ( t ) - к • у ( t ) ] ^ min. (5)
Аппаратно это можно сделать путем одновременной записи цифровых эквивалентов сигналов x(t) и y(t) в память микроконтроллера приемника, а затем осуществляющих процедуру поиска минимума функции (4) путем вариации коэффициента ~ .
Нормированная по x(t) разность будет содержать энергию инерционной части импульсной характеристики (3):
T п - J [ K ,- - J2 dt . (6)
Превышение коэффициента п над некоторым порогом, заданным требованиями к отношению сигнал/помеха, будет означать решение задачи обнаружения искомого объекта на фоне нестационарного шума с использованием алгоритма
Я x ( t ) - ~ . у ( t ) ] 2
п - -------------, (7)
£ [ x (О - Mx ] 2
- 1
где Mx – математическое ожидание процесса x(t)
Реализация алгоритма (7) возможна и в спектральной плотности; заметим, что алгоритм идентификации (1) через оценку функции взаимной корреляции сигналов x(t) и y(t) дает точное решение лишь для случая белого шума. Произвольный вид спектра входного возмущения x(t) требует определения специального алгоритма совместной обработки сигналов x(t) и y(t), что не является тривиальным.
На рис. 3 изображена функциональная схема работы поискового прибора.
При использовании современной электронной комплектующей базы реализация подобного метода позволит создать легкий полевой прибор, не уступающий по информационной отдачи классическому методу ВП, в то же время существенно снижающий технико-экономические
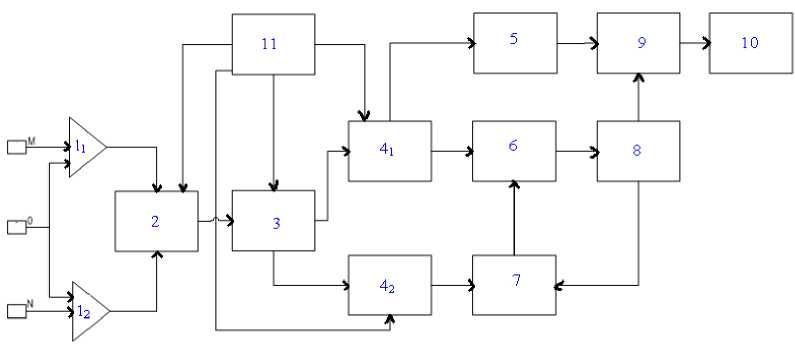
Рис. 3. Функциональная схема работы поискового прибора: 1 – усилители; 2 – коммутатор; 3 – аналогоцифровой преобразователь; 4 – оперативно запоминающие устройства; 5 – блок вычисления дисперсии x(t); 6 – вычитающее устройство; 7 – управляемый аттенюатор; 8 – блок вычисления дисперсии разности электрических потенциалов; 9 – делитель; 10 – блок индикации; 11 – блок управления затраты, связанные с развертыванием питающей линии и эксплуатацией генератора поляризующего тока в сложных горно-таежных районах местности.
