Метод гармонического элемента в моделировании стационарных динамических процессов

Автор: Соболев В.и, Черниговская Т.Н.
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Рубрика: Естественные науки
Статья в выпуске: 1 (28), 2010 года.
Бесплатный доступ
Рассматривается общая методика построения гармонических элементов в моделировании колебаний конструкций в виде системы балок и тонких пластин. Изложена последовательность формирования компо- нентов матриц динамических жесткостей, обеспечивающая исключение задачи дискретизации инерционных параметров.
Гармонический элемент, гармоническое сканирование связей, стационарное динами- ческое состояние
Короткий адрес: https://sciup.org/142142161
IDR: 142142161 | УДК: 621.06
Method of harmonic element in stationary dynamic process modeling
The common methodology of harmonic elements construction in modeling of system of beams and thin plates vibration is considered in the article. A sequence of dynamic inflexibility matrix formation, which accepts the task of discretization inertial parameter, is resulted in the article
Текст научной статьи Метод гармонического элемента в моделировании стационарных динамических процессов
Распространенность производств и технологических процессов, сопровождающихся высокой виброактивностью оборудования заставляет уделять повышенное внимание вопросам безопасности конструкций и рабочих мест. Особенно остро эти вопросы стоят на обогатительных и других производствах, специфика технологии которых требует размещения виброактивного оборудования на верхних этажах, что исключает возможность использования технологических фундаментов и приводит к непосредственной передаче динамических нагрузок на несущие конструкции перекрытий.
Перекрытия промышленных зданий представляет собой сложную, нерегулярную по расположению, геометрическим параметрам и узловым соединениям систему балок и плоских элементов - пластин. Виброактивность таких конструкций, наиболее интенсивно проявляется вертикальными составляющими колебаний, обусловленными режимами работы технологического оборудования. В примерах можно назвать горно-обогатительные производства, предприятия энергетики, угольной, деревоперерабатывающей промышленности, судовые транспортные системы и пр., где устанавливаются грохоты, вентиляторы, электродвигатели, электрогенераторы, компрессоры и другое виброактивное оборудование.
При оценке влияния виброактивного оборудования на состояние конструкций промышленных зданий и сооружений возникает необходимость моделирования процессов их динамического взаимодействия. Наиболее распространенные методы описания таких процессов основаны на дискретизации инерционных и жесткостных параметров элементов строительных конструкций (метод конечных элементов, метод граничных элементов, метод конечных разностей и т. д.).
Однако оценка погрешностей дискретизации динамических моделей с нерегулярными границами областей в большинстве случаев крайне затруднена. В этих условиях актуальны задачи построения дискретно-континуальных динамических моделей конструкций, подвер- женных гармоническим воздействиям. Такие модели не имеют погрешностей связанных с дискретизацией инерционных параметров.
Прямое формализованное описание динамики таких систем приводит к необходимости определения совместного решения совокупности уравнений в частных производных и обыкновенных дифференциальных уравнений. Трудность решения задачи в такой постановке усугубляется нерегулярностью границ областей и разнородностью граничных условий элементов конструкций.
Для расчета на стационарные гармонические воздействия конструкций, представленных совокупностью бесконечномерных балочных элементов, известен метод динамических податливостей, основанный на формировании уравнений динамического равновесия в соединительных узлах элементов по направлениям возможных перемещений узлов.
На основе развития методов динамической податливости разработаны дискретноконтинуальные модели, включающие бесконечномерные изгибаемые элементы (балки), материальные точки, твердые тела и пружины [2]. Создан программный комплекс, реализующий метод расчета систем, включающих произвольные комбинации таких элементов на стационарные гармонические воздействия [2].
Моделирование виброактивных систем, основанное на развитии метода динамической податливости позволяет использовать в качестве инерционных величин рассматриваемых систем как распределенные, так и сосредоточенные параметры. При этом сохраняются все свойства метода конечных элементов, позволяющего осуществлять решение при разнообразных граничных условиях и нерегулярности распределения физических и геометрических параметров. Сохранение свойств и некоторая аналогичность построения решений позволяет говорить о конечных элементах, но в отличие от классических вариантов специализированных для решения задач динамики и содержащих в качестве параметров частоту воздействия и распределенную массу. С учетом указанных особенностей такие элементы названы гармоническими элементами (ГЭ) . Осуществимая при этом узловая сшивка решений уравнений динамического состояния конечных элементов, полученных в виде амплитуд гармонических реакций в налагаемых связях, допускает аналитическое (функциональное) представление колебательных форм. Последнее обстоятельство значительно упрощает процедуры анализа и обобщения результатов решения и позволяет осуществлять нетрадиционные способы виброизоляции, основанные на формировании колебательных форм с заранее заданными свойствами. Метод, использующий свойства колебательных узлов в вынужденных формах колебаний упруго изгибаемых элементов, проиллюстрирован [2] на примере разработки системы виброизоляции промышленных грохотов, расположенных на деформируемых основаниях, - конструкциях.
С целью определения функций колебательных форм и построения матрицы динамических жесткостей рассмотрим вынужденные изгибные моногармонические колебания с частотой to балки с равномерно распределенной погонной массой р , длиной a, изгибной жесткостью EJ , при загружении ее постоянной продольной силой N . Для определенности рассмотрим расчетную схему с узловыми закреплениями, обеспеченными линейными и узловыми связями с номерами 1,2,3 (рис.1, в ).
Колебания балки осуществляется под воздействием сосредоточенных гармонических сил и моментов, приложенных в некоторых точках (узлах) балки. При отсутствии межузлового динамического воздействия уравнение динамического равновесия элементарного участка балки в пролёте между узлами описывается уравнением (1).
p V xx + EJV xxxx - NV xx = 0. (1)
При заданной частоте внешнего воздействия to колебательные формы балки однозначно определяются вектором амплитуд узловых гармонических перемещений
Y = (Y (°)- Y.lx =0- Y (1 )• U=a - (2) в котором компоненты расположены по порядку нумерации соответствующих связей. Вектор Y sin го определяет краевые условия для уравнения (1). Представим решение уравнения колебания балки в разложении по вынужденным колебательным формам от единичных гармонических перемещений (с единичными амплитудами) связей, обеспечивающих закрепления узлов. Единичное гармоническое перемещение каждой связи с номером i по своему направлению вызывает реакции во всех наложенных связях. Упорядоченные по номерам связей значения этих реакций образуют некоторый вектор Ri амплитуд гармониче ских реакций в связях. Поочерёдное гармоническое перемещение связей формирует матрицу динамических реакций R = {R1, R2, R3}.
Положительным считается реактивный момент. направленный по часовой стрелке и сила. действующая в положительном направлении оси Y (рис.2).
Расчетная схема рассматриваемого примера содержит три связи. В общем случае, количество связей задачи плоских изгибных колебаний может быть равным от двух до четырех.
Для определения коэффициентов матрицы R и функции амплитуд Y ( x ) вынужденных колебаний балки подставим искомое решение вида V ( x ) = Y ( x ) sin( ro t )
Y





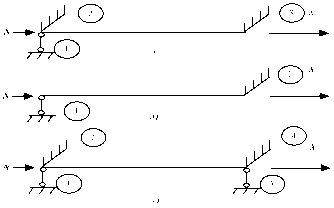
Рис. 1. Расчетные схемы балок с различными вариантами закреплений,1,2,3,4 – номера связей в уравнении (1).
Сократив полученное уравнение на sin( ro t ), получаем обыкновенное дифференциальное
уравнение:
( IV ) ( x ) - NY ( )( x ) - Y ( x ) ^-^ = EJ EJ
Характеристическое уравнение для (3) имеет вид :
Ц
N 2 го 2 р
— ц--
EJ EJ
= 0.
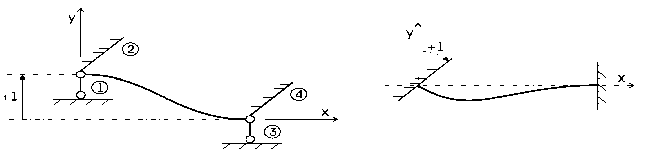
Рис . 2 Правило знаков реакций в связях
Определив
N N 2 го 2 р
-------±--1--
2 EJ 4EEJ )2 EJ ’ имеем
^i = q, где
^ 2 = - q ,
ц 3 — is , и 4 — - is ,
|
q =^ |
N + 2 EJ } |
N2 to 2 p 4 ( EJ ) 2 ' EJ |
s —
N
\ 2 EJ
N
N 4 ( EJ ) 2
to2 p
EJ
Общее решение Y(x) уравнения (3) может быть представлено в виде линейной ком- бинации
Y ( x ) = H (x ) C
четырех линейно независимых частных решений, образующих базисную вектор функцию H (x) = (eqx, e - qx ,sin( sx ),cos( sx)), где C является вектором коэффициентов линейной комбинации (4)
Краевые условия для решения уравнения (3) могут быть заданы в виде вектора (2) амплитуд перемещений по направлениям связей.
Для заданной схемы Yxx| x = a = 0. При определении Y ( x ) коэффициенты линейных комбинаций фундаментального решения определяются в виде матрицы C путем поочередного задания единичных амплитуд перемещений по направлениям связей.
Векторы амплитуд единичных перемещений, упорядоченные по номерам связей образуют матрицу L. Матрицы C и L имеют вид:
|
(с c ii |
c 12 |
c 13 1 |
f 1 |
0 |
0 1 |
||
|
C — |
c 21 |
c 22 |
c 23 |
L — |
0 |
1 |
0 |
|
c 31 |
c 32 |
c 33 |
' |
0 |
0 |
1 |
|
|
< c 41 |
c 42 |
c 43 у |
I 0 |
0 |
0 J |
||
|
Элементы матрицы C определяются из решения систем уравнений: |
|||||||
AC — L, где A - матрица, образованная из базисной вектор функции H(x) следующим образом:
f H(0) J
H x ( x )l -x = 0 H(l ) ( H,(x )L„J xx x a
Матрица амплитуд реакций в связях при попеременных единичных гармонических перемещениях связей в порядке их нумерации (матрица гармонических реакций) определяется в виде.
R = — EJC T H , где H = ( H^ ( x ) | x = 0, H Xx ( x ) | x = 0 , HL ( x ) | x = a ) .
Вектор столбец Y амплитуд узловых перемещений, соответствующий вектору F амплитуд гармонических воздействий по направлениям связей с частотой ю определяется из решения системы уравнений
RY = F, или — EjA1 L) H=F.
Функция амплитуд перемещений оси балки (функция формы вынужденных колебаний) при заданной узловой форме F силового гармонического воздействия имеет вид
Y(x)=YT CT HT(x).
Наряду с балками в строительных конструкциях используются также плоские изгибаемые элементы (чаще всего в виде межэтажных перекрытий или рабочих площадок). Соответственно, представляет интерес включение в математические модели бесконечномерных изгибаемых гармонических элементов в виде тонких пластин. Такие элементы, так же как и балочные ГаЭ, обладая свойствами гибкой аппроксимации сложных границ областей и разнородных граничных условий, могли бы включаться в ранее разработанные дискретноконтинуальные модели ( ДКМ ). В отличие от балочного элемента в этом случае для большинства вариантов граничных условий не представляется возможным получить точные аналитические выражения решений.
Для этих целей приходиться использовать приёмы аппроксимации, схожие с конечноэлементными. Однако в отличие от классических конечноэлементных моделей при таком подходе удается избежать процедур дискретизации инерционных параметров пластины.
Покажем, что принцип динамической податливости в сочетании с методом гармонического сканирования связей, используемый для построения балочного гармонического элемента, может быть успешно применен и в этом случае.
Рассмотрим вынужденные изгибные колебания тонкой пластины. Дифференциальное уравнение поперечных колебаний пластины имеет вид:
д 4W _ д 4 W д 4 W mh д 2 W А
—г + 2—-—х + —г +--у = 0, дx4 дx2cy2 ду4 D дt2
Так же как и в балочном элементе рассмотрим так называемые стоячие волны, получаемые при условии разделения переменных времени и пространства. Для этого представим функцию W ( x , у , t ) в виде:
W ( x , у , t ) = sin( tot ) g ( x , у ) .
Получаем
D ■ / л/д4 g д4 g д 4 g 2 .
— sin(tot)(—T + 2 2. 2 + ^4) = gto Sin(tot)• mh дx дx ду ду
При sin( tot ) * 0
d 4s d4s d4s ,
D(Y-g + 2 д g x + Y-g.) = to2 mhg.
д x4 д x 2 д у 2 д у4
Исключая параметр времени переходим к решению задачи стационарных колебаний, позволяющей пользоваться параметрами пространства в виде амплитуд перемещений и динамических реакций в связях. Прямое использование классических приемов конечноэле- ментного построения оказывается невозможным в силу того, что полученное уравнение (5) имеет в правой части неизвестную функцию to2mhg(x, у), выражающую распреде ленную инерционную нагрузку при достижении точек поверхности пластины амплитудных значений, тогда как при построении конечных элементов (КЭ) она известна и выражена зависимостью q(x, у), определяющей заданную поверхностную распределенную нагрузку. Уравнение деформированного состояния элементарного участка пластины в этом случае имеет вид:
д4 W 2 д4 W д4 W) = дx4 дx2 ду2 ду4 ^
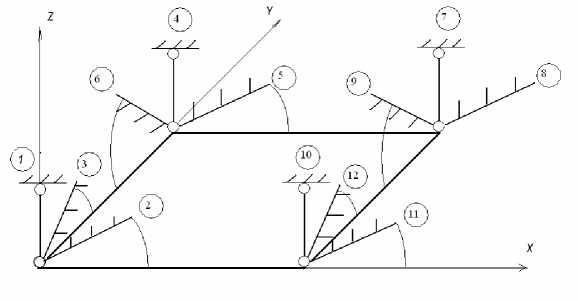
Рис . 3 Расчетная схема прямоугольного гармонического элемента
Для построения ГаЭ прямоугольной пластины рассмотрим достаточно распространенный в практике конечноэлементных разработок вариант четырехузлового элемента с узлами, расположенными в вершинах углов некоторой конечной прямоугольной области тонкой пластины. Используем принцип сканирования связей. Для этого наложим на возможные перемещения узлов связи, обеспечивающие кинематическую узловую неподвижность изгибаемого пластинчатого элемента (рис. 3).
В каждом узле необходимы три связи; одна линейная - по направлению оси Z и две угловых - в плоскостях ZoX и ZoY . Таким образом, степень кинематической подвижности элемента, которая определяет размерность параметрического пространства функции, интерполирующей поверхность перемещений g ( x , у ) , равна двенадцати.
Для построения гармонического элемента тонких прямоугольных пластин с жестким закреплением сформируем интерполирующие полиномы для базиса граничных условий, определенного возможными вариантами поочередных единичных перемещений узловых связей.
Для варианта возбуждения первой связи имеем:
gx у) «Д ( x у) • A, (6)
2 2 3 2 2 3 3 2
где Л ( x , у ) = (1, x , у , x , xy , у , x , x у , xy , у , x у, xy ) ,
A = (a 1 , a 2 , a 3, a 4, a 5, a 6, a 7 , a 8 , a 9 , a 10, a^, a 1 2) .
(Индекс вектора коэффициентов определяется номером перемещаемой связи.)
Перемещая первую связь на единичную величину и фиксируя все остальные в нулевом положе -нии, определяем элементы вектора A 1 путем решения системы уравнений:
V • A 1 = (1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,0)1 , (7)
где V - матрица узловых условий поля перемещений.
|
Вычисляя значения |
функции |
Д ( x . у ) и |
её производных |
в узловых |
точках |
имеем развернутую |
||
|
запись матрицы V : Г 1 |
0 |
0 |
00 |
000 |
0 |
0 |
0 |
0 " |
|
0 |
- 1 |
0 |
00 |
000 |
0 |
0 |
0 |
0 |
|
0 |
0 |
- 1 |
00 |
000 |
0 |
0 |
0 |
0 |
|
1 |
0 с |
00 |
с 2 0 0 |
0 |
с 3 |
0 |
0 |
|
|
0 |
- 1 |
0 |
0 - с |
000 |
- с 2 |
0 |
0 |
- с 3 |
|
0 |
0 |
- 1 |
00 |
- 2 с 0 0 |
0 |
- 3 с 2 |
0 |
0 |
|
V= 1 |
bc |
b 2 bc |
c 2 b 3 b 2 c |
bc 2 |
c 3 |
b 3 c |
bc 3 |
|
|
0 |
- 1 |
0 |
- 2 b - c |
0 - 3 b 2 - 2 bc |
2 - c |
0 |
- 3 b 2 c |
- c 3 |
|
0 |
0 |
- 1 |
0 - b |
- 2 c 0 - b2 |
- 2 bc - 3 c 2 |
- b 3 |
- 3 bc 2 |
|
|
1 |
b |
0 |
b 2 0 |
0 b 3 0 |
0 |
0 |
0 |
0 |
|
0 |
- 1 |
0 |
- 2 b 0 |
0 - 3 b 2 0 |
0 |
0 |
0 |
0 |
|
_ 0 |
0 |
- 1 |
0 - b |
0 0 - b 2 |
0 |
0 |
- b 3 |
0 _ |
Выполняя операцию обращения матрицы V имеем матрицу, столбцы которой являются коэффициентами полиномов g(x, y) интерполирующих функции перемещений поверхности пласти- ны при соответствующих вариантах задания граничных условий (вариантах перемещения узловых связей).
Например, при перемещении первой связи вектор коэффициентов полинома имеет вид:
A 1
1 0 0 - 3 - 1 - 3 2 3 3 2
1 0 0 b2 bc c2 b3 b2c bc2 c3
- 2 -
1 T
.
b 3 c bc 3
Соответствующий интерполирующий полином представлен в виде:
^=1+ 3 A=1XV. 3 v2+2- 3+ A A+3- Л 2^2 2+- 3v-^x 3 g(x,y) 1 ' x ' xy ' y ' xx ' x y +' xx +' xy ' x y +' xy b2 bc c2 b3 b2c bc2 c3 b3c bc3
Имея равенство (8) можем для сформированных граничных условий определить аналитические выражения реакций в узловых связях.
{% } =(% x X y X xy ) T .
Скомпонуем для этого вектор деформаций изгиба пластины в виде:
где d 2 g . в 2 g . у - 2 d g — величины кривизны изгиба и скручивания пласти-
X x = "1X2 х У X xy" 'у г "
ны.
Для определения вектора моментов { м } = ( M x м МХУ используем равенство:
{ M } = G { х } . (9)
где для изотропного материала пластины
G = D • ц
ц
1 - ц
μ - коэффициент Пуассона, Eh 3
Г 21 12 1 1 - ц 2 I
Выполняя преобразование имеем выражение компонент вектора
{ M } через элементы
вектора A 1 , - то есть через параметры интерполирующей функции.
Для определения реакций в связях воспользуемся условиями равновесия элементарного участка пластины:
дм дMxy x +—3-2-- Q дx дy x
= 0
M + d My 5 x 8 y
—
Qy = 0
Подстановка найденных выражений компонент вектора
{ M } в (10) и (11) позволяет оп
ределить величины перерезывающих сил Qx , Q y .
Условие равновесия выполняется на расчетной области почти всюду за исключением узловых точек, в которых величины Qx, Qy имеют разрыв в силу того, что в этих точках возникают реакции в линейных связях.
Для узловых точек справедливы условия равновесия в виде: Q x + Q y + ъ = о ,
Величины линейных реакций r1 1, r4 1, r7 1, r10 1 определяются из равенств (11) при подстановке соответствующих координат узловых точек.
Выражения реакций в угловых связях определяются аналогичным образом из условий равнове- сия моментов в узловых точках.
M + M + r ., = 0 , x xy Xi ,1
M + M + r ., = 0 . (14)
y xy yi ,1
То есть из (13) находим величину реакций в угловых связях 2,5,7,11 в плоскости ZoX , а из (14) -в связях 3,6,9,12 плоскости ZoY . Полученные величины rn формируют первый столбец матрицы
R единичных реакций, определенных при помощи параметров вектора А, выраженных в свою очередь через: геометрические параметры h, b, с; механические параметры m, E, ц пласти ны; и частоту воздействия to.
Сформированные компоненты матрицы R не учитывают влияния распределенной инерционной нагрузки to2mhg(x, y), расположенной в правой части уравнения (5). Для ее учета воспользуемся теоремой о взаимности работ, согласно которой работа по преодолению внешних сил при перемещении связи равна работе, совершенной поверхностной нагрузкой при прогибах пластины.
Исходя из этого, при перемещении связи с номером i имеем:
rm 1 = Ц to 2 mhg2(x, y) 2 0 0 2
Таким образом, окончательно диагональный элемент формируется в виде суммы r" = ri + rm . (16)
Формирование второго столбца матрицы R осуществляется аналогично при единичном перемещении второй связи. Система уравнений (7) при этом имеет вид:
V- А 2 = (0,1,0,0,0,0,0,0,0,0,0,0) T .
Выполнение операций (7) - (15) с последовательной подстановкой столбцов матрицы A в выражение (6) формирует матрицу динамических жесткостей (амплитуд единичных динамических реакций) R , что позволяет аппроксимировать амплитудные состояния стационарных колебаний изгиба посредством узловых соотношений вида:
R - U = F , где U - вектор амплитуд обобщенных узловых перемещений, а F - вектор амплитуд узловых сил.
Таким образом, предложенный алгоритм реализации гармонического элемента обеспечивает устранение процедур дискретизации инерционных параметров пластины и связанных с ними погрешностей расчета. В алгоритме существование погрешностей обусловлено лишь наличием процедур аппроксимации жесткостных свойств пластины также неизбежных в дискретных методах. Параметры модели остаются распределенными, а исходное уравнение в частных производных не заменяется системой обыкновенных дифференциальных уравнений динамики, описывающих колебания материальных точек дискретизированных в узлах ансамбля элементов.
Моделирование стационарных колебательных процессов в системах, включающих балки и тонкие пластины, осуществляется на основе использования элементов с распределенным характером инерционных параметров.
