Метод и система для торможения летающих объектов

Автор: Тригер В., Лещинская-Альтшуллер А., Хмельник С.
Журнал: Доклады независимых авторов @dna-izdatelstwo
Рубрика: Авиация и космонавтика
Статья в выпуске: 41, 2018 года.
Бесплатный доступ
Предлагается презентация патента, подробные реквизиты которого приведены в приложении 1.
Короткий адрес: https://sciup.org/148311646
IDR: 148311646
Текст научной статьи Метод и система для торможения летающих объектов
Изобретение относится, в общем, к области космоса и авиации, и, в частности, к способу и системе, которые осуществляют торможение воздушным судном (самолетом, спутником) для обеспечения безопасной посадки.
По существу, предлагается
-
• запатентованное устройство,
-
• физико-математическое обоснование его
работоспособности,
-
• программы расчета различных вариантов устройства,
-
• программы расчета траекторий воздушного судна в процессе торможения.
Основные преимущества:
-
• значительное сокращение массы спутника благодаря: уменьшению теплозащитной массы,
-
• значительное сокращение топлива для тормозных двигателей спутника,
-
• повышение безопасности при входе в плотные слои атмосферы без создания ударной волны,
-
• ограничение перегрузки до 5G, что актуально для
o сохранения экспериментальных результатов на спутнике, o сохранения здоровья экипажа и пассажиров самолета.
-
• значительное уменьшение вероятности разрушения самолета при аварийной посадке, что может привести к травмам или массовым потерям жизни.
Принцип действия
Основу устройства составляет шлейф, выпускаемый в момент торможения. Шлейф развивает
-
• силу э лектродинамического торможения в разреженной атмосфере,
-
• силу аэродинамического сопротивления в плотных слоях атмосферы.
Электродинамическая тормозная сила создается за счет взаимодействием атмосферных ионов с заряженным шлейфом. При этом сила этого взаимодействия регулируется благодаря особой конструкции шлейфа (см. приложение 2) в зависимости от скорости спутника и высоты полета; тем самым поддерживается допустимая перегрузка и удар при входе в плотные слои атмосферы. Конструкция такова, что кинетическая энергия спутника преобразуется в кинетическую энергию взаимодействия атмосферных ионов с заряженным шлейфом
Аэродинамическая тормозная сила создается благодаря особой конструкции шлейфа – см. приложение 3.
Рассмотрим подробнее принцип электромагнитного торможения
Шлейф представляет собой длинный конденсатор, движущийся с высокой скоростью. Движущиеся таким образом электрические заряды создают т.н. конвекционный электрический ток (что было показано еще в начале прошлого века Эйхенвальдом). Электрический ток создает вокруг шлейфа магнитное поле. Отрицательные заряды на поверхности шлейфа создают в окрестности шлейфа отрицательное электрическое поле. Это поле отталкивает отрицательные ионы и притягивает положительные ионы. Падающие со всех сторон на шлейф положительные ионы создают электрический ток, направленный к шлейфу. Этот ток взаимодействует с магнитным полем шлейфа, направленным перпендикулярно этому току (вокруг шлейфа). Ток ионов сдвигается возникающей при этом силой Ампера (как в моторе постоянного тока). Ионы сдвигаются в сторону движения шлейфа. Энергией такого движения является кинетическая энергия шлейфа. Затрачивая энергию на движение ионов, шлейф вместе со спутником теряет кинетическую энергию, т.е. тормозится. Расчеты показывают, что сила торможения пропорциональна скорости шлейфа-спутника. Положительные ионы, падающие на конденсатор, разряжают его. Установленный на спутнике генератор постоянного высокого напряжения вырабатывает ток подзаряда конденсатора. Таким образом, сила электромагнитного торможения зависит от тока подзаряда.
По существу, неотемлемой частью изобретения является метод и программа расчета
-
• силы электромагнитного торможения, необходимой для удержания ускорения в заданных пределах при известной скорости (по величине и направлению) и высоте спутника,
-
• величины тока подзаряда конденсатора в зависимости от известной силы электромагнитного торможения.
В приложении 4 дан пример результата такого расчета.
Устройство содержит
-
• тормозной шлейф – см. приложения 2 и 3,
-
• аккумулятор
-
• источник постоянного высоко напряжения (около 1000 в)
-
• блок управления
Общий вес устройства составляет примерно 10% от веса легких спутников и уменьшается с увеличением веса спутника.
Управление
Для управления устройством должны быть установлены измерители высоты и скорости. Блок управления на основании этих измерений рассчитывает ток подзарядки шлейфа, от которого зависит электродинамическая тормозная сила. Тем самым поддерживается допустимая перегрузка и удар при входе в плотные слои атмосферы. В приложении 3 показана траектория некоторого спутника, полученная при определенном управлении тормозным устройством
Приложение 1 . Реквизиты патента.
A METHOD AND SYSTEM FOR BRAKING OF FLYING
OBJECTS
PCT/IL2017/050671
PATENT PENDING
Receiving Office: Israel Patent Office
International Filing Date: 18/06/2017
International Searching Athourity: Israel Patent Office
ISA Received Date: 05/07/2017
Sent to IB: 25/06/2017
ISRAEL PATENT
Israel Received Date: 19/07/2017
Applicantes
TRIGER Vitaly Israel, Ashdod
LESHINSKY-ALTSHULLER Anya Israel, Kiriat Byalik
KHMELNIK Solomon Israel, Bene-Ayish
Agent ROSENTHAL Ytzhak Israel, 21, Hapninim,
St Yaud-Monoson, 6019000
Приложение 2. Диэлектричекий шлейф.
К спутнику прикреплен диэлектричекий шлейф, заряжаемый отрицательным зарядом от генератора, установленного на спутнике. Шлейф во время полета вытягиватся и летит с большой скоростью вслед за спутником.
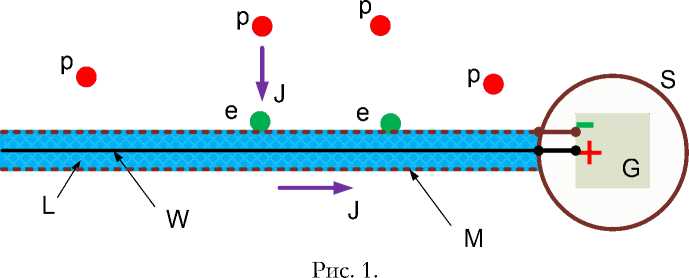
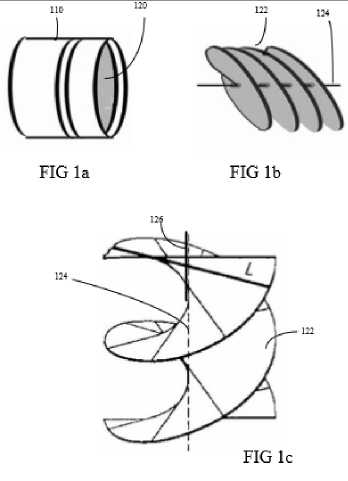
Шлейф представляет собой плоский провод с металлическим покрытием и высоковольтной изоляцией, свернутый в спираль – подробнее см. в приложении 3. Шлейф подключен ко внутреннему высоковольтному генератору – см. рис. 1, где
S - оболочка спутника,
G – генератор,
L - диэлектрический шнур,
W – внутренний металлический провод, М – металлическое покрытие шнура, е - поверхностные электроны, р – ионы.
Приложение 3. Шлейф как аэродинамический тормоз.
Приложение 4. Траектории полета
Для иллюстрации здесь показаны результаты расчета траектории для спутника со следующими характеристиками:
-
• масса – 5 кг,
-
• начальная скорость – 8000 м\сек,
-
• начальная высота – 500 км.
Получены следующие характеристики траектории:
-
• ускорение <50 м/сек,
-
• скорость приземления <5 м/сек,
-
• скорость входа в плотные слои атмосферы <160 м/с на высоте ≈100
км
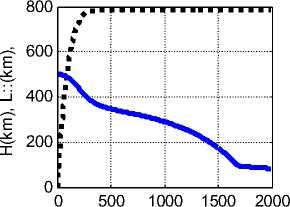
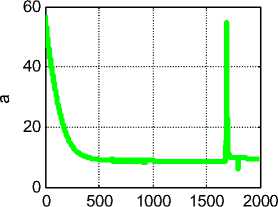
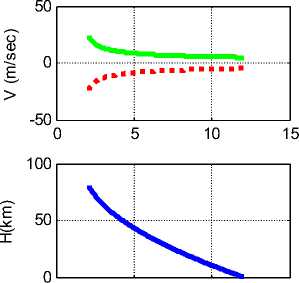
Ниже используются следующие обозначения:
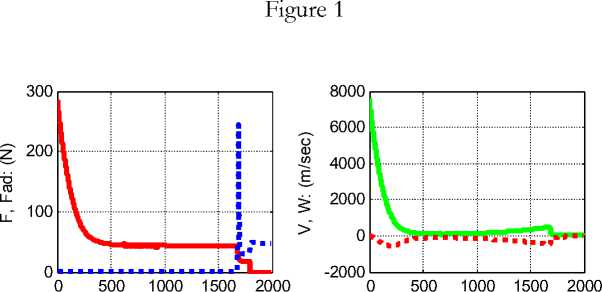
V(t) – абсолютная суммарная скорость,
W(t) – вертикальная скорость (пунктиром), а(t) – абсолютное ускорение, F(t) - суммарная сила, Fad(t) – аэродинамическая сила H(t) – высота, L(t) – расстояние.
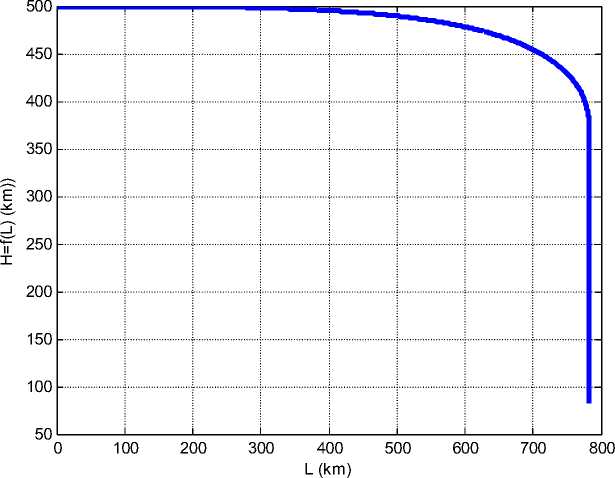
На Fig. 1 показана вся траектория H(L).
На Fig. 2 показан начальный отрезок траектории (первые 2000 сек), в правом верхнем окне 2 показаны V(t), W(t) (пунктиром), в правом нижнем окне 4 показано а(t), в левом верхнем окне 1 показаны F(t), Fad(t) (пунктиром), в левом нижнем окне 3 показаны H(t), L(t) (пунктиром).
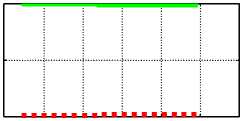
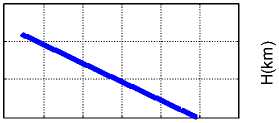
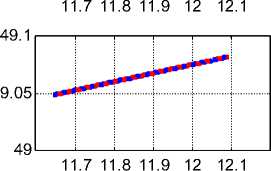
На Fig. 3 показан конечный отрезок траектории (от 2000 сек до 12000 сек), в левом окне 1 показаны V(t), W(t) (пунктиром), в левом окне 2 показана H(t), в левом окне 3 показаны F(t), Fad(t) –(пунктиром), в правом окне показана траектория H(L).
На Fig. 4 показан крайний участок траектории (последние 400 секунд), в левом окне 1 показаны V(t), W(t) (пунктиром), в левом окне 2 показана H(t), в левом окне 3 показаны F(t), Fad(t) (пунктиром), в правом окне показана траектория H(L).
t (sec) t (sec)
Figure 2
49.5
га
48 0
48.5
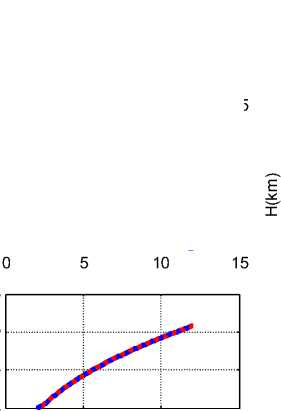
Figure 3
5 10
t (sec)
0 782
L(km); SputnikKino2.m
0) со
Е
11.7 11.8 11.9 12 12.1
-5
Е
1.5
t (sec)
2.5
0.5
0 782
L(km); SputnikKino2.m
Figure 4
