Метод контроля плотности жидких сред по спектральным характеристикам отраженных акустических импульсов

Автор: Солнцева Александра Валерьевна, Скворцов Борис Владимирович, Борминский Сергей Анатольевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 6-1 т.16, 2014 года.
Бесплатный доступ
В статье рассмотрен метод контроля плотности жидкой среды, находящейся в емкости резервуарного парка. Метод основан на спектральном анализе зондирующего и отраженного от контролируемой среды акустических импульсов.
Акустический импульс, спектральная плотность, отражение, жидкая среда
Короткий адрес: https://sciup.org/148203537
IDR: 148203537 | УДК: 531.756
Method controlling density of liquid medium based on spectral characteristics of reflected acoustic impulses
The article describes a control method of liquid medium density in a pool of tanks. Method is based on spectral analysis of information about impulses sounding and reflected from liquid medium.
Текст научной статьи Метод контроля плотности жидких сред по спектральным характеристикам отраженных акустических импульсов
цов волноводов 1 и 2 устанавливается зеркальная пластина 4 для отражения импульсов из горизонтальной плоскости распространения в вертикальную и обратно. Между открытым концом волновода 1 и отражающей пластиной 4 существует технологическое отверстие, предназначенное для свободного хода продукта в полости волноводов. Генератор 5 выдает зондирующие импульсы на акустический датчик 3, вернувшийся отраженный сигнал принимается также датчиком 3 и передается в устройства 6 и 7 для определения времени распространения импульса в полости волноводов, а также проведения спектрального анализа. Устройство позволяет:
-
- осуществлять комплексные измерения уровня и плотности жидких сред, находящихся в резервуаре,
-
- устранить проблему получения неточных данных при наличии пены на поверхности продукта,
-
- уменьшить возможность загрязнения датчика,
-
- учесть влияние “мёртвой” зоны акустического датчика.
Предлагается использовать для контроля плотности отражающей поверхности метод импульсного акустического зондирования. Сущность импульсного зондирования состоит в следующем. Посредством применения акустического датчика в направлении контролируемой среды излучается зондирующий импульс p(0,t) , (точка излучения принимается за начало координат). Дойдя до границы раздела сред, при этой пройдя расстояние Н , импульс искажается за счет свойств среды распространения (среда I) и преобразуется в импульс p(H,t) . Этот импульс частично отражается от поверхности раздела, частично преломляется, проходя в контролируемую среду (среда II), таким образом, разделяясь на два импульса: p1(H,t) и p2(H,t) . Эти импульсы, искаженные по форме и амплитуде относитель-
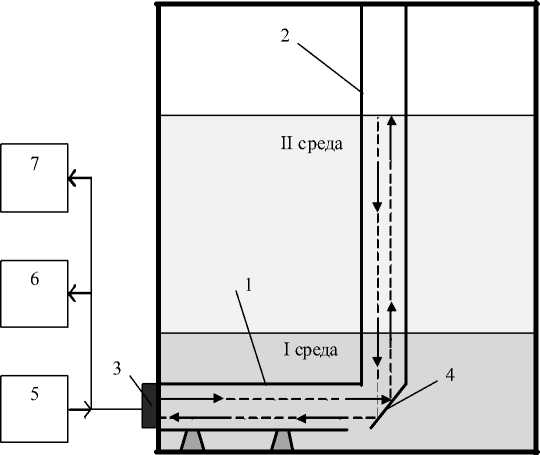
Рис. 1. Конструкция устройства для акустического контроля:
1, 2 – волноводы, 3 – акустический датчик, 4 – зеркальная пластина, 5 – генератор зондирующих импульсов, 6 – блок измерения времени, 7 – блок спектрального анализа
но зондирующего импульса, несут в себе информацию свойствах контролируемого продукта, в том числе и плотности.
В рамках математического моделирования процедуры контроля плотности приняты следующие допущения.
-
1. Контролируемая отражающая среда однородна, изотропна и стационарна с точки зрения электрических параметров.
-
2. Среда линейна и пассивна с точки зрения электромагнитных свойств.
-
3. Распространение акустических сигналов происходитв полости одномерного волновода, то есть энергия в нем (вектор Пойтинга) распространяется вдоль одной координаты z .
Зондирующий импульс любой формы p(0,t) представляет собой сгусток энергии, возбуждающий вокруг себя набор колебаний разных частот, комплексный амплитудный спектр которых определяется преобразованием Фурье [2]:
∞
S (0, j®)= J p (0, t) e- j".
-∞
где zI
В работах [4, 5] на основе теоретических положений, изложенных в [1-3] показана общая математическая модель распространения импульсов в однородных стационарных средах Спектральная плотность отраженного от контролируемой среды сигнала, прошедшего расстояние 2 Н (от точки излучения до границы сред и обратно), S(2H, jω) определяется по выражению:
S (2H, j®) = K(j®)S (0, j®) e-j2k 1j)H ,(2) где K(jщ) – коэффициент отражения, k (j®)=®1 - j^®) (3)
cρc
– волновой вектор среды, где с – фазовая скорость звука,
-
r плотность среды,
-
4 С
-
b = - n + Z + ^C P^V (4)
PV
– диссипативный коэффициент, где h, z, x , С Р ,C V – динамическая вязкость, вторая вязкость и коэффициент теплопроводности среды, удельные теплоемкости среды в изобарном и изохорном процессах соответственно.
Коэффициент отражения определится как [3]:
K(jw) = zi.(j ® ) - z i (j ® ) (5)
zn(j ® ) + zi(j ® ) ’
ρ I2сI3 ρ I2I сI3I
2 , z u 2 ,
ρIсI - jbIω ρIIсII - jbIIω
zI , zII – акустические импедансы контактирующих сред, cI,cII,ρI,ρII,bI,bII – скорости звука, плотности и диссипативные коэффициенты контактирующих сред.
Скорости звука cI , cII в средах могут быть представлены как полиномиальные зависимости от плотности и в общем виде определяться выражением:
n c = f(P) = Ё akp . (7)
Данные о плотности отражающей поверхно- сти заключены в выражении для акустического импеданса среды в соответствие с (6). Преобразуя (5), получим выражение:
z. x X К( № ) + 1
zn(Jto) = zi(Jto) , „ , . . . (8) 1 - K( jω)
Если не учитывать поглощение сред ( b=0 ), тогда (8) примет вид:
K + 1 си p II = с I pI ~, 77 .
1 - K
Выражаем из (2) коэффициент отражения K(j ω ) , а также с учетом (7) представляя скорости звука как функции плотности f1( ρ I),f2( ρ II) , получим:
р( P ii ) P ii = f( P i )P i
Sl(2H,J^) + e-.
S(0,jω)
e - 2 j f1(ωρI)H - S 1 (2H, jω) . (9)
S(0, jω)
При учете поглощения сред для расчета зависимости плотности среды II, получим, что выражение (9) имеет вид:
S№Je) + e - j-clPTH
C11P11 _ C2p2 . S(0jto)_____________ (10)
с I2I ρ II - jb II ω с I2 ρ I - jb I ω - jω2cI c ρI2IIρ - IjbIH S1( 2H, jω) .
e S(0,jω)
Рассмотрев скорость звука как функцию плотности, имеем:
( f 2( P II) ) P II
( f2( P Ii) ) P II - JbII to
- j ω 2f 1 ( ρ I ) ρ I - jb I H
, ( f 1 ( P I ) ) 2 Pl
⋅
S i (2H,Jg) + e S(0,jω)
2 f1 ( ρI )ρI - jbI - jω e fi(PI))2 Pi
H S 1 ( 2H, jω)
-
_ ( f i ( P i ) ) p
( f i( P i ) ) 2 Pi - Jbto
S(0,jω)
Полученные выражения включают в себя спектральные плотности S(0,j ω ) и S(2H,j ω ) , которые являются комплексными числами. Для дальнейшего анализа удобно с учетом формулы Эйлера представить их в показательной форме следующим образом:
S(0,Jto) = A(0,to)eJ^0m), (12)
S(2H ,Jto ) = A(2H ,to )е]ф2н,°).(13)
Выразив отношение спектральных плотностей S(0,j ω ) и S(2H,j ω ) из выражения (2), (12), (13), получим выражения:
S(2H'J^) = K(i® )e-*"')2H (14)
S(0, ω)S(2H, J to ) _ A(2H'to)eP<2H^”)S(0,Jto) " A(0'to)e^(0to) . (15)
Приравняв выражения (14) и (15), получим:
A(2H,ω) A(0,ω)
e - k 1 ( ω )2H
e(^(2H,to) -ф(0ДО)) _ K(Jto)
При рассмотрении случая, не учитывающего поглощения сред, в выражении (16) отношение модулей спектральных плотностей зондирующе-
A(2H,ω)
го и отраженного сигналов и модуля
A(0,ω)
коэффициента отражения K( ω ) определяют действительные части спектральных плотностей, а показатели степени е – их мнимые части. Поскольку комплексные числа равны в том случае, если равны их действительные и мнимые части, получим выражение, определяющее модуль комплексного коэффициента отражение через отношение модулей спектральных плотностей зондирующего и отраженного импульсов:
A(2Hto) _ K( Jto)|A(0,ω) ,
Тогда согласно (16) и (17) получим выражение, определяющее зависимость плотности отражающей среды от отношения модулей спектральных плотностей контролируемых сигналов без учета поглощения сред:
A (2 H , to ) + 1
A (0, to ) |K ( to )|+ 1
с " P" = Ci P i 1 A (2 H , to ) = Ci P i T — K ( to )| '(18)
A (0, to )
Если представить скорости звука в средах как функции плотности, выражение (18) примет вид:
I K ( to )| + 1
f - ( P ii ) P ii _ f l ( P i )pi 1 - K ( to )| . (19)
При известных параметрах среды I, правая часть выражения (19) сводится к действительному числу, а левая будет представлять полином степени ( k+1 ), где f2( ρ II ) определяется в соответствие с (7). В простейшем случае, когда f 2 ( P ii ) _ ^ 1 " P ii + a o — линейная зависимость с коэффициентами a0, a1 , выражение (19) будет представлять собой квадратное уравнение относительно ρ II . В таком случае выражение для плотности контролируемого продукта сII из (19) определится как:
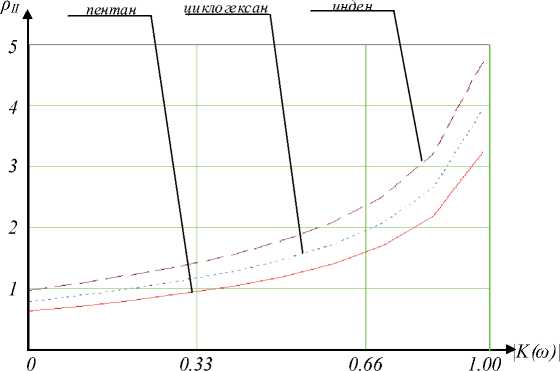
Рис. 2. График зависимости плотности отражающей среды от модуля комплексного коэффициента отражения
K (to) + 1 ’1 1 - K(to)
- a о + a 2 + 4 a i • f x ( p,p
pII =
2 a 1
. (20)
Пример расчета зависимости плотностей отражающих сред от отношения модулей спектральных плотностей зондирующего и отраженного импульсов представлен на рис. 2. Показаны три варианта зависимостей для различных сред распространения зондирующих импульсов: пентан ( с=0,6263 кг/м3 ), циклогексан ( с=0,8109 кг/м3 ), инден ( с=0,9638 кг/м3 ).
Выражения (1) - (20) определяют общую методику контроля плотности жидких сред в резервуарных парках. На практике, данная методика наиболее эффективна применима, когда плотности контролируемых сред ρI , ρII соизмеримы, тогда коэффициент отражения зондирующего импульса есть значение из интервала (0,1). Пример такого случая, измерение плотности продук- та, находящегося над уровнем подтоварной воды в резервуаре. Также метод может быть применен для решения задач химической промышленности, связанных с работой с многофазными растворами и другими жидкими средами.
Список литературы Метод контроля плотности жидких сред по спектральным характеристикам отраженных акустических импульсов
- Исследование объектов с помощью пикосекундных импульсов/Г.В.Глебович, А.В.Андриянов, Ю.В.Введенский. М.: Радио и связь, 1984. 256 с.
- Вайнштейн Л.А. Распространение импульсов//Успехи физических наук. 1976. Т.118. №2. С.339-366.
- Бреховских Л.М. Волны в слоистых средах. М.: Наука, 1973. 343 с.
- Солнцева А.В. Математическое описание импульсных сигналов, отраженных от границы раздела сред//Тезисы докладов Международной молодежной научной конференции “XII Королевские чтения”. 2013. С.136.
- Скворцов Б.В., Лезин И.А., Солнцева А.В. Математическое моделирование и расчет распространения направленных импульсов в однородных поглощающих средах//Известия Самарского научного центра РАН. 2011. Т.13. №6. С.41-47.
