Метод корректировки координат текущего местоположения для систем точного земледелия

Автор: Копкин Александр Сергеевич
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Механизация и электрификация животноводства, растениеводства
Статья в выпуске: 2 (10), 2010 года.
Бесплатный доступ
Представлены математический метод коррекции координат, поступающих со спутниковой навигационной системы, и математический алгоритм реализации этого метода. Представленный метод позволит повысить точность позиционирования навигационных систем.
Система спутниковой навигации, алгоритм коррекции, математический алгоритм
Короткий адрес: https://sciup.org/140204017
IDR: 140204017 | УДК: 004.384
Coordinate correctness method of the real location for precise agriculture systems
The mathematical coordinate correctness method is observed. It is displayed through glonas. This method realization algorithm is observed too. The given method will increase precision of the glonas.
Текст научной статьи Метод корректировки координат текущего местоположения для систем точного земледелия
Современные спутниковые навигационные системы (СНС), применяемые в большинстве устройств, имеют высокую точность позиционирования и малое время отклика. Эти особенности позволяют использовать спутниковую навигацию для точных земляных работ, таких как опрыскивание и посев, качество которых в обычных условиях не удовлетворяет предъявляемым требованиям. Однако применение СНС в точном земледелии ограничено ввиду возникновения скачков координат, причины которых различны – от тропосферных задержек из-за погодных условий до искажения сигнала, связанного с появлениями различных препятствий.
При проведении экспериментов на точность позиционирования GPS-чипа MediaTek MT3329 были получены следующие результаты: на протяжении достаточно продолжительного времени (порядка нескольких часов) позиционирование системы устойчиво, затем происходит скачок позиции на 3–4 метра и дальнейшее устойчивое позиционирование (рис. 1).
При выполнении различных точных земляных работ такие скачки координат могут внести существенную погрешность в измерении текущего положения техники и привести к значительному ухудшению качества выполняемых работ.
Предлагается математический метод коррекции, позволяющий скорректировать скачки координат GPS системы. Данный метод основан на измерении ускорения движения техники. Частота поступающих данных с СНС равна 5 Гц, следовательно, время между расчетами не превышает 200 мс. Ускорение, развиваемое техникой в этом случае, будет равно:
Е = V n - V m ) • 5 (м/с2), (1) где V – скорость, измеренная на прошлой итерации;
-
V – скорость, измеренная на текущей итерации;
ε – ускорение, развиваемое техникой на данном интервале времени.
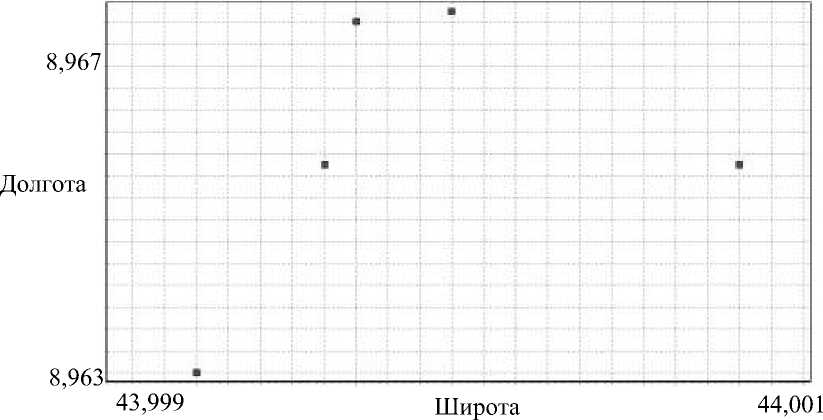
Рис. 1. Разброс значений координат при статическом позиционировании
При подстановке в формулу (1) полученных экспериментальных данных мы получим следующие значения ускорений: для первого скачка ε = 17,25 (м/с2); для второго скачка ε = 19,9 (м/с2);
не
для третьего скачка ε = 12,2 (м/с2);
для четвертого скачка ε = 2 (м/с2).
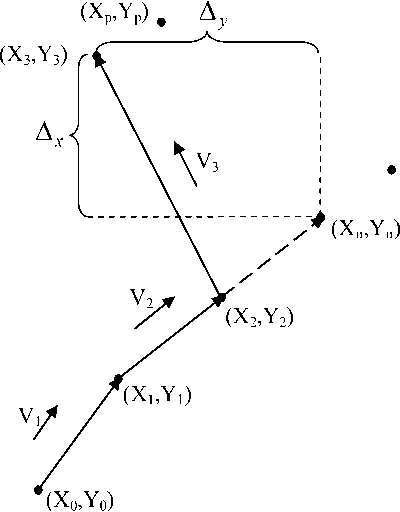
Очевидно, что при движении техника может развивать такие ускорения. На рисунке 2 представлено движение техники по криволинейной траектории.
(X н ,Y н )
Рис. 2. Схема движения техники
При движении техники с СНС поступают сигналы о рассчитанном текущем местоположении (X 0 , Y 0 ), (X 1 , Y 1 ), (X 2 , Y 2 ), (X 3 , Y 3 ). В каждый момент времени позиционирования необходимо рассчитывать текущую скорость движения техники:
V i = J ( x i - x o )2 + ( У 1 - У 0 )2 , (2)
V 2 = 7 ( x 2 - x 1 )2 + ( У 2 - У1)2 , (3) V = 7 ( X 3 - X 2 ) 2 + ( У 3 — У 2 ) 2 , (4)
где V – скорость, рассчитанная в точке ( X i , У 1 );
-
V – скорость, рассчитанная в точке ( X 2 , У 2 );
V – скорость, рассчитанная в точке ( x 3 , У з).
Зададим некоторое допустимое ускорение £do . Для того чтобы обнаружить ошибку при расчете текущего местоположения (т.е. выявить факт скачка), необходимо при каждом новом поступлении координат с навигационной системы производить расчет ускорения:
S t = V m — V ,), (5)
где £ m - текущее рассчитанное ускорение;
V т – текущая рассчитанная скорость;
Vп – скорость, рассчитанная на предыдущем этапе.
При выполнении условия £до^ Sm необходимо корректировать рассчитанное местоположение. Для этого полагаем, что движение происходило в том же направлении и с той же скоростью. Отклонения по координатам для рассматриваемого случая будут следующие:
5Х = x2 — х,(6)
5y = У2 — У1, где 5Х - отклонение по оси абсцисс;
5 у - отклонение по оси ординат.
Рассчитаем истинное положение точки:
X,. = х9 + 5,(8)
Хи = х2 + 5х.(9)
После расчета истинного положения необходимо рассчитать величину ошибки позиционирования:
АX = Хи — Х3 ,
А У = Уи— У3, где Ах - ошибка позиционирования по оси абсцисс;
А у - ошибка позиционирования по оси ординат.
Общая ошибка позиционирования будет равна сумме текущей и предыдущей ошибки:
д х =д пх +А x , (12)
д У =д пу +А у , (13)
где д,x - ошибка позиционирования по оси абсцисс, рассчитанная на предыдущем этапе; при первом корректировании полагается равной нулю. дпу - ошибка позиционирования по оси ординат, рассчитанная на предыдущем этапе; при первом корректировании полагается равной нулю.
При последующих итерациях при расчете текущего местоположения при отсутствии скачка необходимо корректировать текущее местоположение:
Х н = Х р +д х , (14)
У н = У р +д у . (15)
Если же обнаружен скачок, то необходимо производить коррекцию, описанную выше.
Данный метод разработан для применения совместно со спутниковой навигационной системой GPS, реализованной на чипе MTK3329, при использовании совместно с наземной техникой. Он позволяет избежать ошибок, связанных с внезапными скачками значений координат, присылаемых с СНС. Представленный метод может быть применен с незначительными изменениями для других систем спутниковой навигации или других видов техники.
