Метод моделирования операций внекорабельной деятельности на поверхности Луны с учётом воздействия гипогравитации

Автор: Гущин В.И., Абдюханов Р.Х., Нетреба А.И., Томиловская Е.С., Савеко А.А., Малочка А.В., Швед Д.М., Розанов И.А.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Проектирование, конструкция, производство, испытания и эксплуатация летательных аппаратов
Статья в выпуске: 2 (41), 2023 года.
Бесплатный доступ
В статье рассмотрены подходы к моделированию операций внекорабельной деятельности на поверхности других космических объектов (небесных тел) с применением технологий виртуальной реальности и систем моделирования микро- и гипогравитации путём механического обезвешивания оператора. Описаны применяемые в мировых космических агентствах комплексы-симуляторы, а также опыт ИМБП РАН в реализации данного направления разработок и исследований. Представлен специально разработанный авторами статьи и апробированный в рамках исследований иМбП РАН подход к моделированию операций внекорабельной деятельности с целью изучения психофизиологических аспектов данных операций с учётом воздействия гипогравитации, основанный на применении технологий виртуальной реальности и стендов адаптивного обезвешивания.
Внекорабельная деятельность, напланетная деятельность, виртуальная реальность, симулятор поверхности иного небесного тела, системы обезвешивания
Короткий адрес: https://sciup.org/143180648
IDR: 143180648 | УДК: 629.78.078:523.34
Approach for simulating extravehicular activities on the Moon surface under hypogravity
The article discusses technical approaches for modeling extravehicular activity (EVA) operations on the surface of other space objects (celestial bodies) using virtual reality technologies and micro- and hypogravity simulation systems via mechanical hanging to provide weight relief of an operator. Described are simulators used in the space agencies, and SSC RF - IBMP RAS experience gained in the area of their development and research. Presented is an approach for EVA simulation specially developed by the article writers, and experimentally tested within the SSC RF - IBMP RAS research to study psychophysiological aspect of EVA operations with due regard to hypogravity conditions based on virtual reality technologies and adaptive weight relief benches for simulation of landing operations, including walking on the lunar surface and control of the lunar rover under hypogravity.
Текст научной статьи Метод моделирования операций внекорабельной деятельности на поверхности Луны с учётом воздействия гипогравитации
В условиях приближения сроков реализации перспективных межпланетных полётов становится всё более актуальной наземная отработка эргономических и биомедицинских аспектов деятельности на поверхности естественных космических объектов, включая Луну. Немаловажная часть этих работ посвящена оценке возможностей выполнения космонавтами рабочих операций на этапе высадки на планету после воздействия микрогравитации. Этим задачам, в частности, посвящён эксперимент ИМБП РАН «Полевой тест», направленный на оценку нарушения основных сенсомоторных и координационных функций космонавтов в ранние сроки после завершения космического полёта [1]. Эксперимент «Созвездие», проводимый сотрудниками НИИ ЦПК им. Ю.А. Гагарина (ЦПК), позволяет оценить возможность выполнения космонавтами более сложных и комплексных профессиональных операций в процессе напланетной деятельности [2, 3].
Исходя из этого, новой научной задачей является изучение психофизиологических механизмов выполнения профессиональной деятельности после посадки на другие планеты на фоне воздействия гипогравитации на вести-буломоторные функции человека-оператора. В ходе её решения космические агентства разрабатывают реалистичные наземные модели профессиональной напланетной деятельности, чтобы изучить вклад сенсомоторных, когнитивных, кинематических качеств человека-оператора в её выполнение на фоне проявляющихся в первые дни после посадки у более чем 80% космонавтов симптомов космической болезни движения (КБД) [4]. В частности, NASA разрабатывает программу изучения эффективности выполнения отрабатываемой в длительном космическом полёте (ДКП) задачи управления робототехническим манипулятором непосредственно после посадки астронавтов по окончании полёта [5], а также использует технологии виртуальной реальности при моделировании эффектов КБД и выполнении операций высадки на поверхность планеты [6].
Работающий в рамках данной модели оператор должен испытывать существенное психофизиологическое напряжение, связанное с выполнением ответственной профессиональной деятельности. Сценарий высадки также должен включать выполнение деятельности в условиях пониженной гравитации, моделируемой с помощью системы обезвешивания [6]. В рамках Лунной программы СССР, в 1965–1972 гг. Лётно-исследовательским институтом (ЛИИ) им. М.М. Громова в полётах ТУ-104К с моделированием лунной силы тяжести (0,16 земной) была отработана методика действий экипажа с применением инструментов и приборов на макете — аналоге лунного грунта [7]. Этот подход позволил точно смоделировать воздействие пониженной гравитации, но представляется уникальным, а потому сложно реализуемым и дорогостоящим.
Поэтому в настоящее время более широко используются другие модели внекорабельной деятельности (ВКД). В отечественной и международной практике для имитации невесомости и пониженной гравитации давно и широко используются подводная среда и антиортостатические симуляторы (рис. 1, 2) [8]. В случае подводных тренировок используются макеты различного оборудования.

Рис. 1. Подводная отработка внекорабельной деятельности с макетом космического аппарата [9]

Рис. 2. Антиортостатический симулятор элементов внекорабельной деятельности (ремонта) [10]
При использовании антиортостати-ческих симуляторов возможно использование виртуальной реальности в ограниченном объёме (рис. 2).
Крупнейшим российским разработчиком тренажёров для космонавтов — Центром тренажёростроения и подготовки персонала (ЦТиПП, г. Новочеркасск) [11] — разработано множество тренажеров, в т. ч. с использованием виртуальной реальности. В основном это тренажёры для симуляции операторской деятельности различной направленности в исполнении с мониторами персональных компьютеров (ПК) и информативноиллюстративные комплексы виртуаль- ной реальности (ВР), например комплекс «Класс СВР» [12]. Кроме того, для моделирования микрогравитации ЦТиПП разработаны электромеханические системы обез-вешивания различных конструкций, используемые, в частности, в Центре подготовки космонавтов для проведения тренировок и экспериментов, включая «Созвездие» (рис. 3).
Виртуальные тренажёры, разрабатываемые NASA , включают в себя моделирование различных аспектов внекора-бельной деятельности, в т. ч. с использованием кранов-подвесов и роботов-манипуляторов. Наиболее известна роботизированная система ARGOS ( Active Response Gravity Offload System ), используемая в комплекте с различными конструкциями подвесного оборудования для симуляции перемещений в невесомости и по поверхности Луны или Марса в условиях пониженной гравитации, в т. ч. с применением однонаправленной беговой дорожки (рис. 4) [14].

Рис. 3. Подвесные системы, используемые в НИИ ЦПК им. Ю.А. Гагарина [13]
Большинство сценариев высадки на другие планеты имманентно включают в спектр работ управление членами экипажа подвижным транспортным средством — ровером [16, 17]. Тренажёры по управлению роверами реализованы космическими агентствами в различных форматах: с управляющими органами в виде джойстиков и блоков кнопок различной конфигурации. Эти модели реализованы как на стационарных ПК с мониторами и органами управления, так и на динамических платформах, в т. ч. барабанного типа (рис. 5).
В последнее время NASA включило в свою модель ВКД ВР-технологии (рис. 6), используемые для моделирования визуального образа планеты и эффектов КБД [6].
Таким образом, классические подходы к моделированию ВКД, принятые в Роскосмосе и NASA , включают следующие компоненты: модель космического скафандра; физическую модель поверхности; стенды обезвешивания, как правило, с использованием кранов ввиду значительного веса скафандров. Стенды обычно оснащены набором биомедицинских датчиков контроля состояния обследуемого, обеспечивающих безопасность и сбор научных данных.
В период 2008–2011 гг. по заказу Роскосмоса ИМБП РАН проводил изучение медико-психологических аспектов межпланетного полёта на Марс в рамках международного проекта «Марс-500» [19, 20]. В ходе проекта в числе прочих условий межпланетного полёта (автономность, отсутствие допоставок, задержка связи) с помощью модифицированных скафандров «Орлан» моделировали условия проведения ВКД на поверхности планеты [21]. Результаты эксперимента «Марс-500», а также многих

а)

б)
Рис. 4. Система ARGOS в различных вариантах реализации: а — горизонтальный с применением средств виртуальной реальности для моделирования операций внекорабельной деятельности (ВКД) в условиях микрогравитации [6]; б — вертикальный с применением скафандра для моделирования операций ВКД на поверхности другой планеты [15]
других вариантов моделирования ВКД в скафандрах, показали, что использование скафандра не даёт возможности получить широкий спектр психофизиологических и кинематических данных ввиду технических ограничений данных устройств. Кроме того, большой вес скафандра и необходимость использования кранов существенно ограничивают

Рис. 5. Симулятор ровера в виде кабины-барабана на динамическом подвесе [18]
и искажают кинематику движений. Наконец, отсутствие в настоящее время общепринятого скафандра для перспективных ВКД на поверхности Луны тормозит получение научных данных об остаточном влиянии КБД на профессиональную деятельность космонавтов в ходе высадки.
Кроме того, в рамках работ по заказу РКК «Энергия» и Роскосмоса, ИМБП разработана принципиально новая система обезвешивания тела человека и его отдельных сегментов, обеспечивающая относительно свободное перемещение в пространстве за счёт специального алгоритма управления нагрузкой. Наконец, при моделировании ВКД в рамках проекта SIRIUS-19 широко использовались технологии ВР, усиливающие «погружение» человека-оператора в выполняемую им деятельность с помощью создания высокодетального образа напланетной среды. Исходя из этого, в рамках эксперимента SIRIUS-21 , проводимого совместно с NASA и ESA , был апробирован новый подход к моделированию операций ВКД на поверхности Луны в условиях гипогравитации (рис. 7).
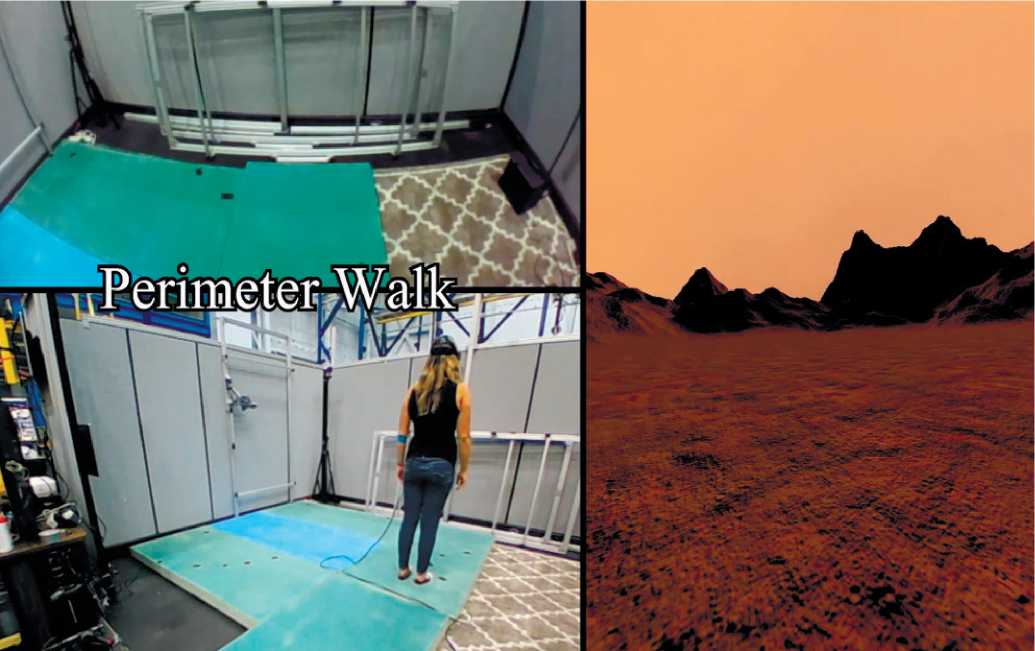
Рис. 6. Модель перемещения по поверхности другой планеты с предъявлением ВР-изображения напланетного окружения (NASA) [6]
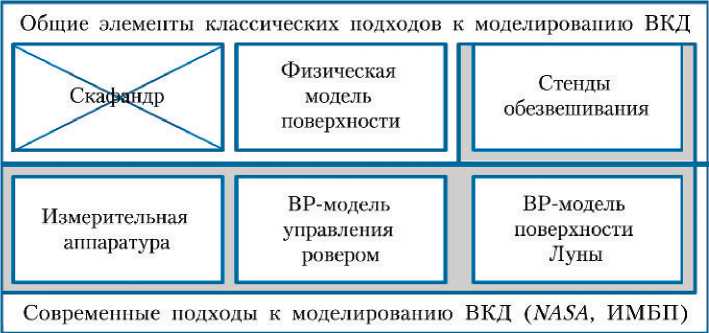
Рис. 7. Элементы подходов к моделированию внекорабельной деятельности (ВКД) с обозначением не используемых в подходе ИМБП элементов (зачёркнуто) и элементов, по которым представлены оригинальные разработки ИМБП (серый фон) (схема создана авторами)
Цели и задачи разработанной модели напланетной деятельности
Целью являлась экспериментальная апробация нового подхода к моделированию операций ВКД на поверхности Луны в условиях гипогравитации.
В рамках достижения этой цели авторами статьи был создан и апробирован универсальный стенд для отработки и изучения перспективных операций в экстремальных условиях с использованием технологий ВР, позволяющий моделировать широкий круг условий выполнения деятельности (включая нештатные ситуации) на перспективной космической технике, проводить эргономическую оценку аппаратуры и оборудования, совершенствовать навыки управления сложными техническими устройствами, изучать психофизиологические аспекты профессиональной деятельности экипажей.
Задачи разработки модели напла-нетной деятельности:
-
• Создание реалистичной и целесообразной имитации набора операций экипажа в ходе высадки. Наиболее адекватным и современным способом моделирования напланетной деятельности, используемым космическими агентствами, является применение технологий смешанной реальности: совмещение реальной деятельности и локомоций с иммерсивными средами (ВР). Для этого необходимо создание специализированной аппаратуры и программного обеспечения.
-
• Разработка и апробация новой системы адаптивного обезвешивания для моделирования воздействия гипогравитации
на оператора, дающей возможность выполнения широкого диапазона различных локомоций, в т. ч. в вертикальном направлении (включая прыжки) за счёт специально разработанных алгоритма и контроллера управления нагрузкой.
-
• Разработка системы регистрации двигательной активности и кинематики
движений при моделировании гипогравитации, а также телемедицинской системы для полу- чения данных о психофизиологической «цене» выполнения деятельности.
-
• Проведение научных исследований в ходе «высадки», решение перспективных задач, в т. ч. эргономических. Для этого необходимо внедрение не использовавшихся ранее в системах телеметрии современных аппаратных, в т. ч. медицинских, решений для оценки состояния здоровья обследуемых.
-
• Сохранение здоровья участников в со-
- ответствии с международными нормами биомедицинской этики, что имело особое значение, так как участие в профессиональной деятельности принимали представители космических агентств разных
стран — как мужчины, так и женщины.
-
• Получение замечаний от методистов, участников отработки модели и обследуемых в целях определения перспектив доработки моделирующего стенда.
В рамках разрабатываемой модели использовались два гибких скафандра (костюма), оснащённые средствами воспроизведения технологий виртуальной реальности, позволяющие создавать у участников «высадки» реалистичные зрительные и кинестетические ощущения пребывания на Луне и дающие возможность выполнения расширенного, по сравнению с ранее использованными в «Марс-500» скафандрами «Орлан», сценария операций на планете. В частности, за счёт этого удалось существенно увеличить длительность «высадки», объём физических перемещений (ходьба, бег), имитаций сбора образцов и ремонтных работ в модуле «Поверхность» Наземного экспериментального комплекса (НЭК) ИМБП РАН. Кроме того, лёгкий гибкий скафандр позволяет использовать в ходе «высадки» современные носимые физиологические регистраторы и кинематические маркеры, т. е. позволяет отрабатывать новые телемедицинские технологии.
Сценарные и технические основы моделирования ВКД на поверхности Луны
В рамках четырёхмесячного изоляционного эксперимента SIRIUS-19 , проведённого ИМБП РАН совместно с HRP NASA в 2019 г., был реализован сценарий высадки на поверхность Луны, разработанный совместно с представителем РКК «Энергия» С.А. Морозовым. Технические системы для реализации сценария разрабатывались совместно с представителями механикоматематического факультета МГУ имени М.В. Ломоносова [22–24].
Обследуемым предъявлялась виртуальная визуальная среда, моделирующая поверхность региона Южного полюса Луны между кратерами Шеклтон и Шумейкер. ВР-симуляция позволяла свободно перемещаться по физической площадке и ограничивалась выполнением задач на месте посадки в естественной гравитации (рис. 8).
Основная часть деятельности в виртуальной среде была связана с выполнением операций прямого и обратного шлюзования, выхода на поверхность планеты, визуальной инспекции виртуального посадочного модуля, выполнением серии кинематических операций в гибких скафандрах и шлемах ВР
(воспроизводя элементы эксперимента «Полевой тест» [1, 25]). Кроме того, виртуальная среда, насыщенная 18 интерактивными объектами, позволяла отрабатывать типовые элементы на-планетной деятельности: погрузочноразгрузочные, монтажные и ремонтновосстановительные работы, работы с целевым, вспомогательным и научным оборудованием. Виртуальный образ, представляемый обследуемому, формировался с помощью носимых компьютеров HP в форм-факторе рюкзака и внешней системы трекинга Steam 1.0 с ВР-шлемами Samsung Odyssey.
По итогам использования ВР в эксперименте SIRIUS-19 , в соответствии с разработанным новым сценарием, в эксперименте SIRIUS-21 с восьмимесячной изоляцией моделировалась высадка трёх членов экипажа в «лунном взлётно-посадочном комплексе» (гермокамера ЭУ-50 НЭК ИМБП). В соответствии со сценарием, каждый из трёх выходов на Луну двух членов экипажа предполагал перемещение по Луне в гибком скафандре с использованием технологии ВР. Основная часть деятельности в виртуальной среде также включала выполнение операций шлюзования, выхода на поверхность планеты, визуальной инспекции виртуального посадочного модуля, выполнение серии кинематических операций в гибких негерметичных скафандрах (близких по своей конструкции к лётным комбинезонам) и шлемах ВР.
Кроме того, в сценарий были вне-

Рис. 8. Участники виртуального моделирования внекорабельной деятельности на поверхности Луны в SIRIUS-19 (фото предоставлено ИМБП РАН)
сены две новые группы операций, связанных с выполнением деятельности при моделировании лунной гравитации:
-
• перемещение по поверхности Луны на всенаправленной беговой дорожке (как минимум, в пассивном варианте со скользящей поверхностью) с адаптивной системой обез-вешивания всего тела для моделирования лунной гравитации;
-
• управление моделью лунного ровера при адаптивном обез-вешивании рук.
Используемый в SIRIUS-21 гибкий скафандр был дооснащён портативными носимыми датчиками пульса, артериального давления, объёма движений верхних и нижних конечностей (акти-графы) в ходе выполнения тех или иных заданий, что позволяет оценивать психофизиологическую «цену» выполнения операций программы высадки. Оснащение гибких скафандров специальными маркерами ВР-трекинга и высокодетальная многомерная видеосьём-ка в модуле ИМБП РАН «Поверхность» также дают возможность оценить кинематические аспекты выполнения операций напланетной ВКД.
В ходе всей ВКД с помощью встроенных в специализированный («умный») костюм датчиков для каждого члена экипажа непрерывно должен был регистрироваться комплекс физиологических параметров: частота сердечных сокращений, пульсовая волна, электрическая активность мышц, частота дыхания, температура тела. Данные должны были сохраняться на подключённый к данной системе носитель информации. Для обеспечения точности регистрируемых данных размеры костюмов, надеваемых в качестве нательного белья, должны были полностью соответствовать антропометрическим параметрам обследуемых, установленным в ходе предварительного 3 D -сканирования тела.
Сценарий предусматривал создание новых технических решений в виде всенаправленной беговой дорожки с адаптивной вывеской тела с индивидуально регулируемой степенью обез-вешивания, используемой для моделирования перемещения по планете в условиях лунной гравитации, а также макета лунного ровера с динамической платформой (креслом), имитацией органов управления, системой обезвешивания рук (моделированием гипогравитации) и имитацией обзора из кабины ровера на многомониторной системе отображения.
Для обеспечения данного сценария были сформулированы следующие технические требования к аппаратуре и оборудованию:
-
• соблюдение медицинской безопасности участвующих добровольцев международного экипажа, наличие режимов «аварийного» отключения;
-
• компактность и малый вес конструкций, создаваемых для размещения в модуле НЭК «Поверхность» ограниченной площади;
-
• возможность управления всей аппаратурой и оборудованием непосредственно самими пользователями, без участия постороннего персонала, поскольку в SIRIUS-21 моделировались автономные условия;
-
• совместимость всех технических систем с программным обеспечением комплекса ВКД, разработанным для создания виртуальной напланетной интерактивной среды перемещения по поверхности;
-
• использование интуитивных интерфейсов управления перемещением как в имитации пешего передвижения по поверхности, так и на ровере;
-
• возможность непрерывной онлайн-регистрации показателей деятельности, кинематики перемещений и психофизиологических параметров участников «высадки».
С учётом данных требований были разработаны, построены и апробированы с участием добровольцев имитационные стенды для моделирования воздействия микро- и гипогравитации при выполнении операций напланетной ВКД (рис. 9).
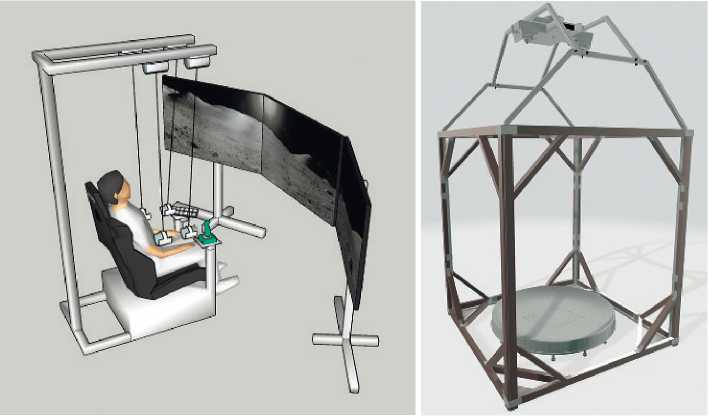
а) б)
Рис. 9. Эскизная визуализация стендов: а — стенд моделирования управления ровером с обезвешиванием рук; б — стенд моделирования пешего передвижения по лунной поверхности с обезвешиванием тела (рисунок создан авторами)
Основной отличительной особенностью этих стендов является автоматическая система обезвешивания, определяющая вес (реальную нагрузку) пользователя и компенсирующая измеренный вес с помощью сервоприводов с тросовыми тягами, прикрепляемыми к конечностям и туловищу и/или ложементам.
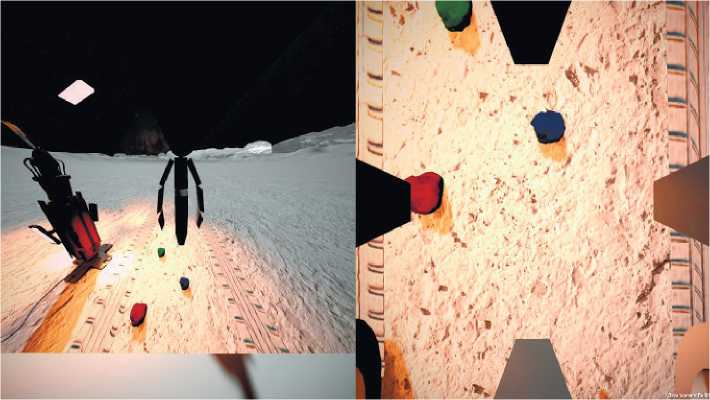
Система обезвешивания тела с всенаправленной пассивной беговой дорожкой
Для выполнения задач с имитацией свободного перемещения по поверхности Луны авторами разрабатываются два технических решения с вращающимся на 360 ° подвесом динамического обезвешивания: пассивная беговая дорожка (чаша) со скользящей поверхностью и активная всенаправленная беговая дорожка (полотно) с управляемым перемещением полотна. В рамках эксперимента SIRIUS-21 использовалась первая версия дорожки в виде чаши 0 1,45 м с покрытием поверхности специальным пластиком с минимальным коэффициентом трения. Для снижения трения до минимально возможного были изготовлены скользящие бахилы, надеваемые на обувь участников (рис. 10).
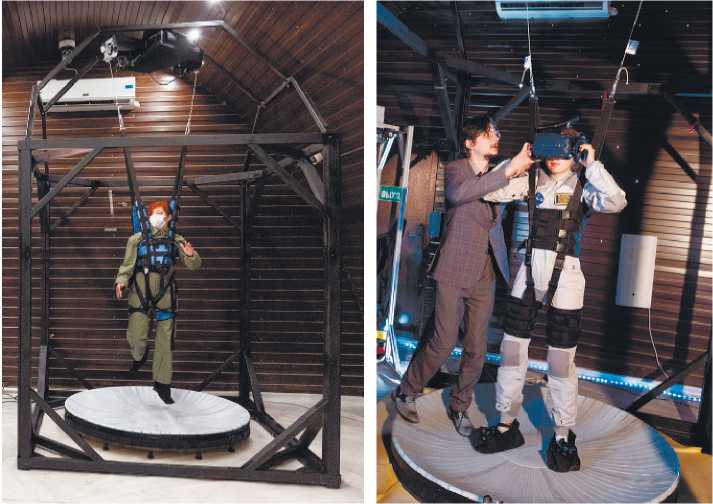
а)
б)
Рис. 10. Испытания стенда «Лунная дорожка» с пассивным полотном, вращающейся адаптивной вывеской и вариантами подвеса операторов без использования системы виртуальной реальности (а) и с системой виртуальной реальности (б) (фотографии сделаны авторами)
Основа разработанной в ИМБП РАН системы обезвешивания тела человека и отдельных его сегментов представляет собой набор высокоточных сервоприводов с высокими динамическими характеристиками. Отличительной особенностью данной системы является использование специального алгоритма управления нагрузкой, который обеспечивает свободное перемещение вывешиваемого оператора в пространстве. Традиционные системы обезвешивания, применяемые, например, в клиниках при выполнении шагательных движений на тредбанах (беговых дорожках), обеспечивают лишь статическую вывеску, подобно подъёмным механизмам. В таких системах вывешиваемый оператор принудительно перемещается на заданную высоту — чем выше, тем меньше реакция опоры. При этом вывешиваемый оператор жёстко зафиксирован. В основе используемой нами системы лежит принцип «бесконечной пружины»: сила сопротивления не зависит от длины и в любой точке траектории остаётся постоянной. Вектор заданной нагрузки (определённый процент от массы тела оператора) имеет противоположное гравитационному полю Земли направление. При этом вывешиваемый оператор может свободно перемещаться в вертикальном направлении (включая прыжки) — тем самым имитируются условия сниженной гравитации или полное её отсутствие. Эта система дополнена адаптивным механизмом вращения для обеспечения относительно свободных поворотов обезвешиваемого оператора вокруг вертикальной оси.
Величина нагрузки может выставляться как вручную (определённый процент от веса тела испытуемого), так и в автоматическом режиме. В автоматическом режиме отслеживается ско- рость вертикального перемещения испытуемого при выполнении прыжковых движений, и по специальному алгоритму подбирается такая нагрузка, при которой скорость перемещения соответствует скорости перемещения тела заданной массы в условиях лунной гравитации. Также предусмотрена возможность преднамеренного замедления фазы приземления после прыжка для корректного согласования реальной скорости спуска и скорости визуализации, генерируемой системой виртуальной реальности, используемой при обезвешивании.
Для обезвешивания пользователя было спроектировано несколько вариантов подвесов (регулируемых жиле-тов/корсетов с манжетами для ног), принцип которых — распределение нагрузки на корпус и ноги пользователя при подвешивании на двух тросах к плечам. Жилеты разрабатывались по фактическим обмерам участников в двух типоразмерах. В качестве образца был взят подвес HP Cosmos для реабилитационной беговой дорожки. Разработанная конструкция позволяет пользователю перемещаться по виртуальной поверхности Луны в любом направлении наиболее естественным способом — переставляя ноги в направлении движения с соскальзыванием ведущей ноги с края чаши к центру.
Для реализации виртуального перемещения по поверхности при ходьбе на всенаправленной дорожке использованы дополнительные трекеры ( Steam Tracker ) для отслеживания «шагающих» движений ног пользователя. Трекеры устанавливаются на обувь участника эксперимента и непосредственно на дорожку для отслеживания их взаимного расположения в пространстве. Для виртуальной среды была использована та же беспроводная ВР-система HTC Vive Pro Wireless , что и для основной программы ВКД. Контент среды — тот же кратер с посадочным модулем и визуально различимая траектория движения со следами колёс лунного ровера.
Задачей обследуемого является проход по заданной траектории до финальной точки и возвращение обратно тем же путём. На трассе он должен преодолевать препятствия (обходить большие камни, перешагивать через малые, перепрыгивать через расщелину). Прохождение отмечается гашением «маячков», расставленных вдоль всей траектории движения. Время на выполнение задачи сценарно ограничено «остатком кислорода для дыхания».
Вращающийся (для обеспечения моделирования ходьбы в различных направлениях и поворотов) подвес для испытуемого состоит из двух высокоточных серводвигателей со встроенными энкодерами и блока управления с визуальным интерфейсом на сенсорном экране, размещённом на одной из стоек подвеса. Управление процессом обезвешивания осуществляется вторым участником виртуальной высадки на поверхность. Рама подвеса, в соответствии с требованиями по максимально допустимой массе конструкции и удельной нагрузке на пол в месте размещения, выполнена из профильной трубы со стабилизирующей обвязкой из деревянного бруса.
Перед началом использования стенда «Лунная дорожка» испытуемый с помощью второго участника надевает обвязку: жилет и ножные манжеты, а также закрепляет на обуви трекеры (устройства отслеживания положения в пространстве) и скользящие бахилы. Затем пользователь встаёт в центр чаши дорожки, нажатием кнопки трекера на ноге выполняет программную калибровку положения ног в центре чаши, после чего зацепляет карабины подвесной системы за металлические подвесные пластины на ремнях своего жилета. Второй участник выставляет на пульте управления целевой вес компенсации с коэффициентом 0,15 к текущему весу испытуемого (для моделирования лунной гравитации) и включает систему обезвешивания. Динамическая система обезвешивания приподнимает пользователя над поверхностью с заданной степенью компенсации, позволяя двигаться по поверхности, подпрыгивать и плавно опускаться после прыжка благодаря специально разработанным алгоритмам компенсации веса, имитирующим замедление падения и имитацию прыжков в пониженной гравитации с увеличенной высотой прыжка. Поворотный узел на двух подшипниках, на котором размещены серводвигатели, может вращаться на 360° благодаря токопроводящей центральной контактной втулке, через которую на сервоприводы подаются питание и управляющий сигнал. Таким образом, обследуемый может перемещаться в любом направлении, переставляя ноги внутри чаши, а поворотный узел с минимальным отставанием следует за движениями пользователя, обеспечивая компенсацию веса вне зависимости от выбранного направления движения.
Для имитации перемещения в виртуальной среде используется программное обеспечение собственной разработки ООО «Интеллектуальные системы здравоохранения». Система позиционирования в пространстве Steam 2.0 сообщает программному обеспечению симуляции позицию ноги испытуемого относительно поверхности чаши, положение чаши в пространстве также фиксируется двумя трекерами в момент калибровки. Смещение ноги относительно центра чаши расценивается системой как совершаемый шаг, и виртуальное пространство «сдвигается» относительно пользователя в соответствующем направлении на величину, равную длине шага. Направление движения определяется по направлению носков обуви в режиме реального времени, при этом изолированное изменение положения шлема (направления взгляда) не влияет на направление движения. Таким образом, пользователь и в движении, и в стационарном положении может осматривать окружающее пространство.
Для прыжков используется приближение к реальной механике «прыжка с разбегом» — отслеживаются перемещения ног в направлении движения (шаги) и их одновременный отрыв от поверхности дорожки. При этом в виртуальной среде отображается «полёт» вперёд в направлении движения с замедленным гашением скорости перемещения, соответствующим гравитационным условиям Луны. Для прыжков в высоту программное обеспечение также отслеживает одновременный отрыв обеих ног от поверхности дорожки, но при этом учитывается их предыдущее положение, и в случае, если в предыдущем положении ног отсутствовали шаги (движение вперёд), отображаемый в виртуальной среде прыжок совершается на одном месте, только в вертикальном направлении.
Динамическая система обезвешива-ния в обоих случаях опускает пользователя на поверхность замедленно, со скоростью, расчётно соответствующей гравитационным условиям Луны, а сама высота прыжка рассчитывается соответственно фактической нагрузке на систему обезвешивания и отображается как увеличенная в виртуальной среде. Обследуемые быстро учатся перемещаться в пространстве с использованием проскальзывающей походки и пользуются возможностями удлинённых прыжков для ускорения движения в виртуальной среде, перепрыгивают препятствия в виде небольших камней и расселин с использованием механики «разбег и прыжок».
Управление роверомв условиях напланетной гравитации
Для стенда «Ровер» была разработана конструкция системы обез-вешивания рук, охватывающая кресло пилота (оператора) ровера, и система из трёх мониторов на специальной стойке с кронштейнами для создания эффекта нахождения в кабине (рис. 11). В качестве органов управления был выбран профессиональный джойстик Kosmosima производства VKB Sim , для имитации панели управления дополнительными функциями — миниклавиатура с восемью ранее запрограммированными клавишами. Сиденье оператора закреплено на трёхстепенной динамической платформе.
Программное обеспечение разработано в соответствии с техническим заданием и включает в себя:
-
• визуальное моделирование перемещения по поверхности Луны с элементами, обозначающими выполнение этапов операторской задачи (стартовая точка, удалённый радар, точка забора проб грунта);
-
• задачу сбора образцов, требующую переключения между управлением движением ровера и управлением робототехническим захватом;
-
• встроенные в сценарий задачи по оценке общей психической работоспособности оператора: простая зрительно-моторная реакция (ПЗМР),
реакция на движущийся объект (РДО) и «Матрицы Равена» [26, 27].
Поскольку предполагается, что данная задача рассчитана на операторов-профессионалов и будет предъявляться неоднократно, для повышения уровня сложности использовались лимиты времени, энергии (заряда аккумуляторных батарей) и удалённости от базы (уровень радиосигнала связи), а также маршруты прохождения трассы с разным количеством препятствий (безо-пасный/длинный и опасный/короткий).
В ходе выполнения задачи регистрировались параметры качества операторской деятельности (количество ошибок, время выполнения задачи), а также психофизиологическая цена её выполнения.
Во время выполнения задачи управления ровером оператор работает на фоне обезвешивания рук (до 1/6 g ), что влияет на точность управления и создаёт более иммерсивный опыт, позволяя смоделировать максимально приближённые к реальности условия управления ровером на поверхности Луны. Непосредственно система обезвешивания рук состоит из высокоточных серводвигателей с энкодерами, комплекта контроллеров, тросов с низкой степенью растяжения, манжет для рук и набора шкивов для намотки

а)
б)
Рис. 11. Схема (а) и фотография (б) стенда «Ровер» в Наземном экспериментальном комплексе ИМБП РАН: 1 — блок контроллеров; 2 — сервоприводы; 3 — манжеты для рук; 4 — пульт управления; 5 — рама из алюминиевого профиля (рисунок создан авторами)
тросов. Управление контроллерами осуществляется по специально разработанным алгоритмам, учитывающим вес сегментов рук (плечо, предплечье) пользователя и компенсирующим прикладываемые пользователем усилия с помощью тросов, к которым прикреплены манжеты, надетые на руки.
Наличие высокоточных энкодеров, встроенных в двигатели, обеспечивающие обезвешивание, открывает широкие возможности для биомеханического анализа движений, поскольку перемещение каждого из сегментов (плечо и предплечье левой и правой руки) вызывает определённое вращение энко-дера по прямой кинематической связи. Полученная информация при помощи специального программного обеспечения позволяет визуализировать смещение отдельных сегментов, строить палочковые модели человека в динамике, а также может быть подвергнута дальнейшей математической обработке.
При работе со стендом пользователь надевает манжеты на локтевой сгиб и запястье и включает систему. С помощью проводного дистанционного пульта он выполняет взвешивание и переводит систему в режим обезве-шивания (так называемый fly mode) на заранее заданную величину (до 100%, задаётся программированием контроллеров до начала эксплуатации). По окончании выполнения задачи пользователь отключает режим обезве-шивания и снимает манжеты, после чего система может быть отключена полностью. В случае возникновения нештатных ситуаций на пульте зажигается сигнальная лампочка, и пользователь, согласно инструкции, выключает и заново включает систему — происходит перезагрузка программного обеспечения блока контроллеров для восстановления работоспособности.
Кресло пилота рове- ра размещается внутри несущей рамы подвеса для рук, рядом может быть установлено второе кресло для штурмана. Выносной пульт управления (на проводе) предназначен для самостоятельной установки режимов работы стенда — спуска и поднятия манжет, включения/выключения режима микрогравитации. Для управления стендом используются джойстик VKB SIM MK II Kosmosima и ранее запрограммированный блок из 12 клавиш. Джойстик имеет два режима работы: управление движением ровера по поверхности (ускорение/торможение/пово-роты) и управление манипулятором для сбора образцов породы. Вспомогательные кнопки управляют отображением камеры заднего вида, миникарты, масштабом миникарты, поворотом камеры заднего вида. Режимы переключаются одной из кнопок на вспомогательной клавиатуре. На остальных расстояния, что, соответственно, приводит к более высокому расходу заряда батарей. Более сложная задача требует осторожного и аккуратного вождения, но при этом меньше расходуется заряд батарей ровера ввиду проезда по более короткому маршруту.
Основные задачи — достижение первой контрольной точки с включением «локатора» и достижение второй контрольной точки со сбором образцов лунного грунта — дополняются тестами «поломка/заклинивание колеса», в ходе которых требуется быстрая реакция с выбором нужной кнопки на дополнительной клавиатуре с соответствующим колесу номером (ПЗМР) и тестом РДО, выполняемым при достижении контрольных точек (сценарно обусловлено настройкой аппаратуры).
кнопках запрограммированной клавиатуры располагается управление выполнением тестов («Поломка» — см. ниже), подъёмом/опусканием захвата манипулятора для сбора образцов и открытием контейнеров для сбора образцов.
В стенде используется динамическая платформа с тремя степенями свободы (вверх/вниз, наклон влево/вправо и крен/тан-гаж). При подключении платформы её движения повторяют особенности перемещения ровера по поверхности Луны и придают дополнительную иммерсивность использованию стенда.
Виртуальная среда, отображаемая на системе из трёх мониторов (рис. 12), представляет собой поверхность Луны с кратерами и препятствиями для прямолинейного движения (камни) с предоставлением испытуемому выбора сложности выполнения задачи: более простая задача без препятствий требует прохождения большего
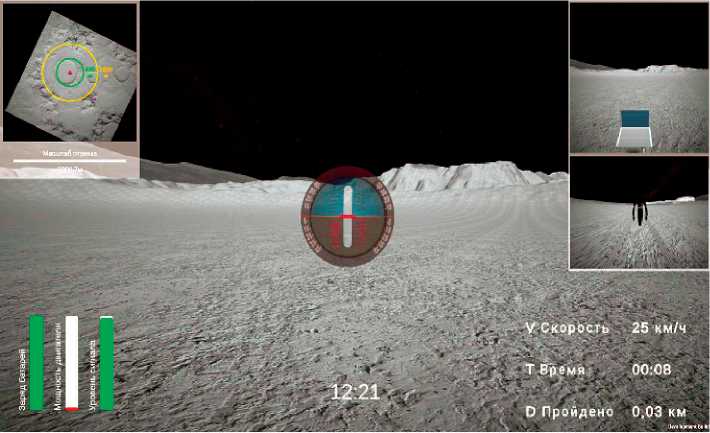
а)
б)
Рис. 12. Интерфейс управления ровером: а — общий интерфейс, б — интерфейс задачи «Сбор образцов» (рисунок создан авторами)
В наземном модельном эксперименте SIRIUS-21 стенд «Ровер» использовался во всех трёх выходах на поверхность для ВКД. Каждый из участников проезжал как минимум по одному разу сложный и простой маршруты, проходя сопутствующие тесты. За действиями пользователей наблюдали психологи-экспериментаторы, выявляя выбираемые пользователями стратегии выполнения задач. Данные тестирования каждого пользователя сохранялись в файлах результатов с указанием всех параметров выполнения заданий.
Перспективы развития стенда и методики
В результате доработки стенда планируется решить комплекс задач, связанных с эргономической оценкой перспективной, в том числе биомедицинской, аппаратуры и оборудования для нужд будущих межпланетных полётов. Дальнейшее развитие модели должно быть связано с повышением качества регистрации собираемой биомедицинской информации. Речь, прежде всего, идёт о сборе параметров кинематики оператора под влиянием изменённой гравитации, оценке психофизиологической цены выполнения пеших перемещений и операторских задач при напланетной гравитации. Кроме того, следует повысить реалистичность кинематических аспектов пешей ходьбы в условиях напланет-ной гравитации. Предполагается решить эту задачу с помощью использования активной плоской всенаправленной беговой дорожки. Кроме того, планируется комбинирование систем обезвешивания тела и рук.
Заключение
-
1. Разработанный на основе нового подхода к моделированию операций ВКД стенд позволил создать, по мнению принимавших в эксперименте SIRIUS-21 методистов ИМБП РАН и NASA , а также обследуемых из США, ОАЭ и России, реалистичную и целесообразную имитацию ряда операций экипажа в ходе высадки на поверхность Луны. Технологии виртуальной реальности обеспечивают полное «погружение» оператора
-
2. Система обезвешивания позволяет смоделировать деятельность в условиях гипогравитации, не ограничивая существенным образом локомоции оператора как в вертикальном направлении, так и при поворотах вокруг вертикальной оси при использовании всенаправленной беговой дорожки или пассивного полотна.
-
3. Выполнение моделируемой ВКД без ограничивающего деятельность скафандра обеспечивает получение широкого спектра психофизиологических и кинематических данных в ходе ВКД и представляется перспективным с точки зрения изучения влияния КБД в период 1–3 сут после приземления.
-
4. Апробированный вариант стенда моделирования ВКД относительно дёшев, мобилен и, следовательно, применим в до- и послеполётных исследованиях как на месте посадки, так и в Центре подготовки космонавтов (в частности, для изучения остаточных эффектов КБД после длительных космических полётов).
в напланетную визуальную среду, мотивируют длительно находящихся в моделируемых неблагоприятных условиях ДКП операторов на выполнение профессиональной деятельности в ходе ВКД.
Работа выполнена при поддержке Минобрнауки РФ в рамках соглашения № 075-15-2022-298 от 18.04.2022 г. о предоставлении гранта в форме субсидий из федерального бюджета на осуществление государственной поддержки создания и развития научного центра мирового уровня «Павловский центр «Интегративная физиология — медицине, высокотехнологичному здравоохранению и технологиям стрессо-устойчивости».
Список литературы Метод моделирования операций внекорабельной деятельности на поверхности Луны с учётом воздействия гипогравитации
- Reschke M.F., Kozlovskaya I.B., Lysova N, Kitov V., Rukavishnikov I., Kofman I.S., Tomilovskaya E.S., Rosenberg M.J., Osetsky N, Fomina E., Grishin A., Wood S.J. Joint Russian-USA field test: Implications for deconditioned crew following long duration spaceflight // Aerospace and Environmental Medicine. 2020. Т. 54. № 6. С. 94-100. Режим доступа: https://doi. org/10.21687/0233 -528X-2020-54-6-94 -100 (дата обращения 13.12.2022).
- Крикалёв С.К., Крючков Б.И., Курицын A.A., Харламов M.M. Эксперименты с участием экипажей MKC для осуществления полёта на Mаpс // Известия Тульского государственного университета. Технические науки. 2013. 6-2. С. 278-288. EDN: SBCMJR
- Крючков Б.И., Харламов M.M., Долгов П.П., Усов В.M., Коренной В.С. Исследование качества работы космонавтов при моделировании условий ВKД на поверхности Mаpса в экспериментах с участием экипажей MKC // Пилотируемые полёты в космос. 2021. № 3(40). С. 43-60. Режим доступа: https://doi.org/10.34131/MSF.213.43-60 (дата обращения 13.12.2022).
- Крикалёв С.К., Крючков Б.И., Курицын A.A., Харламов M.M. Пилотируемые полёты к Mаpсу: перспективы и результаты моделирования с участием экипажей MKC // Актуальные проблемы авиационных и аэрокосмических систем: процессы, модели, эксперимент. 2014. Т. 19. Вып. 1(38). С. 1-21.
- Долгов П.П., Иродов Е.Ю., Коренной В.С. Mиссии - аналоги НАСА, проводимые в интересах осуществления пилотируемых полётов в дальний космос: HMP, DesertRATS, ISRU, PLRP, FMARS // Пилотируемые полёты в космос. 2016. № 3(20). С. 68-79. EDN: UQTGTI
- Rosenberg M.J., Koslovsky M., Noyes M., Reschke M.F., Clément G. Tandem walk in simulated Martian gravity and visual environment // Brain Sciences. 2022. 12(10). 1268. URL: https://doi.org/10.3390/ brainsci12101268 (accessed 13.12.2022).
- Цыганков О.С. Пятидесятилетие внекорабельной деятельности // ^с-мическая техника и технологии. 2015. № 1(8). С. 3-16. EDN: TZWTGX
- Weiss P., Gardette B., Chirié B., Collina-Girard J., Delauze H.G. Simulation and preparation of surface EVA in reduced gravity at the Marseilles Bay subsea analogue sites // Planetary and Space Science. 2012. К 74. 121-134.
- ^смонавт Андрей Борисенко участвует в испытаниях комплекса гидролаборатории: новость от 19.06.2020 // ФГБУ «Научно-исследовательский испытательный центр подготовки космонавтов имени Ю.А. Гагарина»: официальный сайт. Режим доступа: https://www.gctc. ru/main.php?id=4998 (дата обращения 13.12.2022).
- Killian M. New astronaut training and Mars base 1 at KSC visitor complex offers incredible experience // AmericaSpace — for space explorers: web site. URL: https://www.americaspace.com/2018/02/13/ new-astronaut-training-and-mars-base- 1-at-ksc-visitor-complex-offers-incredible-experience/ (accessed 13.12.2022).
- Центр тренажёростроения и подготовки персонала: сайт. Режим доступа: http://simct.ru (дата обращения 27.10.2022).
- Богданов Д.Ю., Кравченко О.А. Математическая модель электромеханических стендов обезвешивания с учётом силовых взаимодействий в радиальной конструкции // Электротехнические системы и комплексы. 2018. № 1(38). С. 26-32. EDN: YVGTOD
- Специализированный тренажёр «Выход-2» // ФГБУ «Научно-исследовательский испытательный центр подготовки космонавтов имени Ю.А. Гагарина»: официальный сайт. Режим доступа: https://www.gctc.ru/main.php?id=2894 (дата обращения 13.12.2022).
- Orr S., Casler J., Rhoades J., de León P. Effects of walking, running, and skipping under simulated reduced gravity using the NASA Active Response Gravity Offload System (ARGOS) // Acta Astronautica. 2022. № 197. P. 115-125. URL: https://doi. org/10.1016/j.actaastro.2022.05.014 (accessed 13.12.2022).
- Kumar M., Turner J.L. New tests evaluate mission readiness of astronauts upon landing // NASA: official web site. URL: https://www.nasa.gov/feature/new-tests-evaluate-mission-readiness-of-astronauts-upon-landing (accessed 13.12.2022).
- Fong T, Abercromby A., Bualat M.G., Deans M.C., Hodges K.V., Hurtado Jr. J.M., Landis R., Pascal L, Schreckenghost D. Assessment of robotic recon for human exploration of the Moon // Acta Astronautica. 2010. № 67. P. 1176-1188. URL: https:// www.ri.cmu.edu/pub _files/2010/7/acta-final-public.pdf (accessed 13.12.2022).
- Долгов П.П., Иродов Е.Ю., Кирша-нов В.Н., Коренной В.С., Крючков Б.И., Онуфриенко Ю.И., Пономарёв К.В., Харламов М.М., Швецов В.В. Подход к проведению послеполётного эксперимента по управлению планетоходом // Пилотируемые полёты в космос. 2020. № 2(35). С. 47-60. Режим доступа: https://doi.org/10.34131/MSF.20.2.47-60 (дата обращения 13.12.2022).
- Astronaut training experience // Kennedy Space Center visitor complex: web site. URL: https://www.kennedyspacecenter.com/ landing-pages/atx (accessed 13.12.2022).
- Григорьев А.И., Ушаков И.Б., Мо-руков Б.В., Бубеев Ю.А., Боритко Я.С., Швед Д.М., Гущин В.И., Черняков Е.Л. Основные операционные подходы к наземному моделированию пилотируемого полёта на Марс // Биотехносфера. 2013. № 4(28). C. 11-17. EDN: RENDBB
- Ушаков И.Б., Моруков Б.В., Бубеев Ю.А., Гущин В.И., Васильева Г.Ю., Виноходова А.Г., Швед Д.М. Основные результаты психофизиологических исследований в эксперименте «Марс-500» // Вестник Российской академии наук. 2014. № 84(3). C. 18-27. Режим доступа: https://doi.org/10.7868/S0869587314030219 (дата обращения 13.12.2022).
- Белаковский М.С., Бреус Т.К., Волошин О.В., Кузьмин Р. О., Моруков Б.В. Высадка на поверхность Марса // Проект «Марс-500»: этап третий. 520-суточная изоляция. М.: ГНЦ РФ - ИМБП РАН, 2011. С. 1-16.
- Александров В.В., Бурдин Б.В., Крючков Б.И., Усов В.М., Чертополохов В.А. Построение исследовательского стенда для психофизиологического тестирования интерактивного взаимодействия человека-оператора с виртуальной средой // Авиакосмическая и экологическая медицина. 2016. № 50(5). C. 6-7.
- Сергеев С.Ф., Бубеев Ю.А., Усов В.М., Крючков Б.И., Михайлюк М.В., Хомяков А.В. Реализация концепции виртуальной среды при моделировании в изоляционных экспериментах деятельности человека при освоении Луны // ВКС. 2022. № 1(110). С. 38-47.
- Иродов Е.Ю., Долгов П.П., Коренной В.С., Крючков Б.И., Ярополов В.И. К вопросу подготовки космонавтов для работы на поверхности Луны / / Пилотируемые полёты в космос. 2018. № 1(26). С. 71-89. EDN: YVTWQY
- Проведение эксперимента «Полевой тест» на месте приземления СА ТПК «Союз ТМА-18М» // ГНЦ РФ - ИМБП РАН: официальный сайт. Режим доступа: http://www.imbp.ru/webpages/ WIN1251/News/2016/P_test032016.html (дата обращения: 27.10.2022).
- Пятибратов Г.Я., Кравченко О.А., Папирняк В.П. Способы реализации и направления совершенствования тренажёров для подготовки космонавтов к работе в невесомости // Известия вузов. Электромеханика. 2010. № 5. С. 30-76. EDN: OJHYLJ
- Платонов К.К. Психология лётного труда. М.: Воениздат, 1960. 351 с. Статья поступила в редакцию 19.10.2022 г. Окончательный вариант — 14.12.2022 г.
