Метод наведения 3D-модели объекта на 2D-изображение на основе инвариантных моментов

Автор: Нгуен Зуй Тхань, Хачумов Михаил Вячеславович
Журнал: Программные системы: теория и приложения @programmnye-sistemy
Рубрика: Искусственный интеллект, интеллектуальные системы, нейронные сети
Статья в выпуске: 4 (35) т.8, 2017 года.
Бесплатный доступ
Решение задачи наведения сводится к оптимизации ориентации 3D-модели объекта для достижения максимального совпадения ее проекции с предъявленным изображением. Критерием близости служит аддитивная свертка квадратов разностей инвариантных моментов сравниваемых 2D- изображений. В принятой постановке проекция 3D-модели есть полутоновое изображение, в котором яркость пикселя определяется глубиной его расположения относительно плоскости наблюдения
ID: 143164273 Короткий адрес: https://sciup.org/143164273
Текст ред. заметки Метод наведения 3D-модели объекта на 2D-изображение на основе инвариантных моментов
В задачах распознавания графических образов возникает необходимость манипулирования 3D-моделями объектов для получения проекции, наиболее близкой, в смысле некоторого критерия, к заданному изображению. Пусть заданы пространственная точка М с координатами (ж, у,z) и ее ортогональная проекция т на плоскость наблюдения z = 0 с координатами (ж, у). Под дальностным изображением (range image) будем понимать цифровое изображение, в каждой точке которого яркость /(ж, у) принимает неотрицательные целые значения, равные величине расстояния от точки М до точки т. Предполагается, что дальностное изображение можно преобразовать во множество точек, являющееся 3D-моделью наблюдаемого объекта.
Для корректного сравнения графических образов могут быть применены различные дескрипторы, метрики и методы управления 3D-моделями. Ранее была рассмотрена задача распознавания лиц
с применением инвариантных моментов Hu в качестве признаков для выполнения корректного сравнения 2D-изображений [1] . В настоящей работе предложено расширение этой задачи на трехмерный случай с применением альтернативных инвариантных моментов. Введем некоторые необходимые определения.
Определение 1. Под 3D-изображением понимается кусочно-непрерывная функция /(ж, у, х) трех переменных, определенная на компактном носителе D С R х R х R и имеющая конечный ненулевой интеграл.
Примером подобной функции служит функция яркости /(ж, у, х), которая имеет целочисленные значения при целых (ж, у, х) и хранится в компьютере в виде трехмерного массива. Каждый элемент этого массива представляет собой пиксель с интенсивностью, находящейся в диапазоне от 0 до L — 1. Величина L обычно является степенью двойки (например, 64, 256) и называется глубиной изображения.
Определение 2. Моменты 3D-изображения (image moments) есть отображения кусочно-непрерывной функции /(ж, у, х) в полиномиальный базис — множество многочленов, определенных на компактном носителе D С R х R х R.
Примером служат моменты изображения
M lm П = У^ P imn f (ж, У, х) dж dy dx,
D где Pimn- полиномиальный базис функций определенных на D; Z, т, п — неотрицательные целые; г = Z + т + п - порядок момента.
Определение 3. Инвариант - функционал I(F ), определенный на изображении F таким образом, что I(F ) = I(D(F )) для пространства всех допустимых преобразований D, в том числе операторов яркостных и аффинных преобразований изображения F .
Для распознавания важно, чтобы I(F 1), I(F 2) были «достаточно различны» для разных изображений F 1, F 2.
Определение 4. Яркостным инвариантом будем называть дескриптор изображения устойчивый к аддитивным и/или мультипликативным изменениям яркости.
Определение 5. Геометрическим инвариантом будем называть дескриптор, который является устойчивым к группе аффинных преобразований изображения.
Рассмотрим задачи сравнения изображений, основанного на применении инвариантных моментов.
1. Сравнение 3D-изображений на основе инвариантных моментов
Пусть f(ж, у, z) есть непрерывная функция, описывающая значение яркости точек с координатами (ж, у, z) в трехмерном пространстве. 3D-моменты определяются путем вычисления следующего интеграла [2] :
« ,„„ — + “ + “
-∞ -∞ -∞
ж1 y т z n f (ж, у, z) dж dy dz
Моменты всех порядков существуют, если функция f(ж, у, z) кусочно-непрерывна и ограничена в конечной области в 3D-Евклидовом пространстве. Центральные моменты вычисляются следующим образом:
Щтп —
+ ∞ + ∞ + ∞
∞ -∞ -∞
(ж - ж), (у — у) т , (z
— z^f (ж, у, z) dж dy dz.
Для дискретного случая (цифрового изображения), который имеет место в нашем случае:
plmn — ЕЕЕ(ж — ^ (у — y)m(z — z)-f (ж,y,z), X Y Z где X,Y, Z - область определения координат точек (пикселей) изображения; (ж, у, z) - геометрический центр 3D-объекта.
Для решения задач распознавания требуется построить моменты, инвариантные к операциям поворота, сдвига и масштабирования. Исходя из практической целесообразности, ограничимся в дальнейшем 3В-моментами с порядком г 6 3. В соответствии с проведенным
Таблица 1. Чувствительность 3D-инвариантов
Момент I1 I2 I3 F1 F2 F3 F4 F5
Чувствительность 5 2 5 4 5 6 5 6 5 4 5 6 5 6 5 6
поиском из различных источников [2 –4] были выбраны следующие моменты:
1 1 =№ 200 + № 020 + № 002 ;
^ 2 =№ 200 № 020 + № 200 № 002 + № 020 № 002 - № 101 - № 110 - № 011
^ 3 =№ 200 № 020 № 002 - Р-002 № 110 - № 020 № 101 - № 200 № 011
+ 2№ 110 № 101 № 011 - № 011 - № 101
F 1 = № 003 + 6 № 012 + 6 № 021 + 6 № 030 + 6 № 102 + 15 № 111 - 3 № 102 № 120
+ 6№ 120 - 3№ 021 № 201 + б№ 201 - 3№ 003 (№ 021 + № 201 ) - 3№ 030 № 210
+ 6 № 210 - 3 № 012 ( № 030 + № 210 ) - 3 № 102 № 300 - 3 № 120 № 300 + № 300 ;
F 2 =№ 200 + № 2)20 + № 002 + 2 № 110 + 2 № 101 + 2 № 011 ;
^ 3 = № 300 + 3 № 200 № 110 + 3 № 200 № 101 + 3 № 110 + 3 № 101 № 020 + 3 № 101 № 002
-
+ № 020 + 3№ 020 № 011 + 3№ 011 № 002 + № 002 + 6№ 110 № 101 № 011 ;
F 4 =№ 300 + № 030 + № 003 + 3№ 210 + 3№ 201 + 3№ 120
-
+ 3 № 102 + 3 № 0и + 3 № 012 + б № 111 ;
F 5 =№ 300 + 2№ 300 № 120 + 2№ 300 № 102 + 2№ 210 № 030 + 2№ 210 № 030
-
+ 2№ 201 № 003 + № 030 + 2№ 030 № 012 + 2№ 021 № 003 + № 003 + № 210
-
+ 2№ 210 № 012 + 2№ 201 № 021 + № 120 + 2№ 120 № 102 + № 102 + № 021 + № 012 .
-
2. Сравнение 2D-изображений на основе инвариантных моментов
Моменты 1 1 ,..., F 5 являются 3D-HHBapuaHTaMH к операциям поворота и сдвига.
Воздействуя на координаты (ж, у, z) можно установить чувствительность 3D-инвариантов к линейным искажениям изображений. Оценка теоретической чувствительности 3D-инвариантов к геометрическим искажениям с коэффициентом 5 представлена в таблице 1 .
Для получения инвариантов к масштабированию достаточно положить: 5 = ^№200 + №020 + №002 и выполнить нормирование путем деления моментов 11,..., F5 на соответствующие значения коэффициентов таблице 1. Нормированные моменты 11,..., F5 являются 3D-инвариантами к операциям поворота, сдвига и масштабирования. Свойства инвариантности можно проверить путем непосредственной подстановки в выражения для моментов формул аффинных преобразований координат изображения и приведения результата к исходному виду.
Для сравнения 3D-изображений при одинаковых условиях освещенности можно применять их 3D-инварианты и построенные на них метрики, например расстояние Евклида.
Полагая п = 0 в формулах для 3D-инвариантов, получим 2D-инварианты (M 1 , ..., M g ) изображения для плоскости XOY :
М 1 =Р 20 + Р 02 + Р 00 ;
M 2 =Р 20 Р 02 + Р 20 Р 00 + Р 02 Р 00 — Р 10 — Р 11 — р 01 ;
M 3 =Р 20 Р 02 Р 00 — Р 00 Р 11 — Р 02 Р 10 — Р 20Р01 + 2Р 11 Р 10 Р 01 — р 01 — Р 10 ;
М 4 = р 00 + 6 р 01 + 6^ 22 + 6д 0з + 6д 1о + 15^ 11 — Зд 1о Д 12 + 6д 12
-
— 3Р 02 Р 20 + 6д 2о — 3Р 00 (Р 02 + Р 20 ) — 3Р 03 Р 21 + 6м 21
-
— 3Д 01 (Д 03 + Д 21 ) — 3^ 10 ^ 30-- 3^ 12 ^ 30 + Д зо 5
M 5 =^ 20 + М 02 + Р-00 + 2^ 11 + 2М 10 + 2д 01 ;
М 6 =Р 20 3 + 3Р 20 Р 11 + 3Р 20 Р 10 + 3Р 11 + 3Р 102 Р 02 + 3Р 102 Р 00 + р 0 2
-
+ 3Р 02 Р 01 + 3Р 01 Р 00 + Р 00 3 + 6Р 11 Р 10 Р 01 ;
М 7 =р 30 + р 03 + р 00 + 3 р 21 + 3 р 20 + 3 р 12 + 3 р 10 + 3 р 02 + 3 р 01
-
+ 6 р 11 ;
М 8 =Р з0 + 2Р 30 Р 12 + 2Р 30 Р 10 + 2Р 21 Р 03 + 2Р 21 Р 03 + 2Р 20 Р 00 + р 0 3
-
+ 2Р 03 Р 01 + 2Р 02 Р 00 + Р-00 + Р 21 + 2Р 21 Р 01 + 2Р 20 Р 02 + Р 12
-
+ 2 р 12 р 10 + р 10 + р 02 + р 01 .
-
3. Задача наведения 3D-модели объекта на 2D-изображение
Полученные моменты (M i ,..., М § ) являются альтернативными по отношению к известным инвариантным моментам Hu [1] . Аналогично можно построить инварианты для плоскостей XO Z , YO Z . Далее можно применить полученные моменты для сравнения проекций 3D-модели с предъявленным изображением.
Пусть f m = f m (x,y) — проекция модели трехмерного объекта на плоскость XOY , f = f (х, у) — заданное полутоновое изображение. В качестве расстояния между предъявленным изображением f и проекцией fm будем использовать величину
W (Р ) =
х ЕИ
N 4=2
- М^ ) 2 ,
а в качестве параметров управления [5] — углы поворота 3D-модели вокруг осей Р = (р1,р2,р3). Задачу оптимального наведения целесообразно решать методом градиентного спуска Р [ *к = arg min( W [к^ (Р )), где к -номер итерации. Для этого полагаем известными начальные значения углов положения (р 10] , р 20] , P^ ). Значения параметров приближения вычисляют по формулам
[k+i] '■. X к '• Л [k] W [ к +1 (Р ) - W [ к (Р )
р = р + XAP\ , AP« =--W^R)-----, где: W‘k] (Р) = dWdp ('); к = 0.1,... — номер итерации; Ap^k] — шаг к-ой итерации; А — нормирующий коэффициент.
В основе решения задачи лежит гипотеза о монотонности и унимодальности функции W(Р ) по каждому из параметров управления (р1,р2,р3), выполнение которой упрощает практическую реализацию метода. Для получения оптимума в этом случае достаточно последовательно решить задачи оптимизации по каждому из параметров. Расширением подхода служит метод последовательных уступок.
Таблица 2. Значения инвариантных моментов
|
Момент |
Варианты расположения 3D-изображения лица |
||
|
1^Р^ ^^^8^ |
^l^^^"^^^ |
||
|
1 1 |
1 |
1 |
1 |
|
1 2 |
0.22245 |
0.22245 |
0.22245 |
|
I 3 |
0.01283 |
0.01283 |
0.01283 |
|
F 1 |
6.255e-06 |
6.255e-06 |
6.255e-06 |
|
F 2 |
0.55510 |
0.55510 |
0.55510 |
|
F 3 |
0.37115 |
0.37115 |
0.37115 |
|
F 4 |
5.52475e-06 |
5.52475e-06 |
5.52475e-06 |
|
F 5 |
5.03792e-06 |
5.03792e-06 |
5.03792e-06 |
Таблица 3. Экспериментальное исследование 8 как индикатора масштабирования
|
Коэффициент масштабирования |
Значение 5 до масштабирования |
Значение 5 после масштабирования |
Отношение значений 5 |
|
2 |
10099.4 |
20198.8 |
2 |
|
3 |
10099.4 |
30298.2 |
3 |
|
0.5 |
10099.4 |
5049.69 |
0.5 |
|
0.25 |
10099.4 |
2524.85 |
0.25 |
-
4. Экспериментальные исследования
Эксперименты были проведены на примере наведения 3D- модели лица на одну из его случайных проекций. В Таблице 2 в качестве примера приведены расчетные значения демонстрирующие инвариантность моментов для трех положений модели 3D- поверхности лица.
В Таблице 3 приведены значения чувствительности инвариантов и коэффициентов масштабирования для выбранной модели 3D-
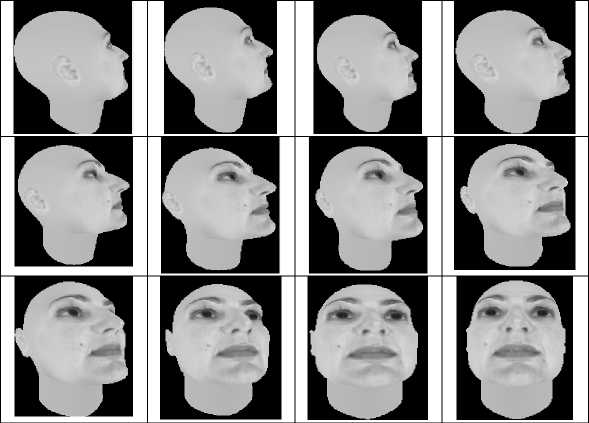
Рис. 1. Последовательность проекций 3d-модели поверхности лица.
Без потери общности рассмотрим однопараметрическую задачу наведения р 1 = argmin(W(р 1 )) путем последовательного вращения 3D-модели вокруг одной оси.
Серия полученных проекций на плоскость XOY в процессе поворота показана на рис. 1 .
Моменты (М 2 ,..., М 8 ) предварительно нормируются в соответствии с таблицей 1 , причем момент М 1 как наименее информативный в дальнейших расчетах не участвует. Характер изменения целевых функций W(р 1 ) и W(р 2 ) в процессе последовательного поворота модели на Др 1 = 5 и Др 2 = 5 градусов отображен на рис. 2 и рис. 3.
Вид функций говорит об их монотонности и унимодальности по параметрам (р 1 ,р 2 ), отражающим практически важные для генерации ракурсов изображения повороты вокруг оси OY и OX соответственно, что соответствует выдвинутой гипотезе.
Полагаем, например, что начальное положение 3D-модели, определяется как ( р ^ 0 = 0, р 20] = 0, р 30] = 0). Исходя из особенностей задачи,
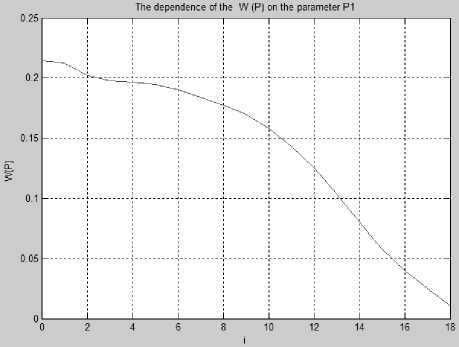
Рис. 2. Зависимость критерия w ( p ) от параметра р 1
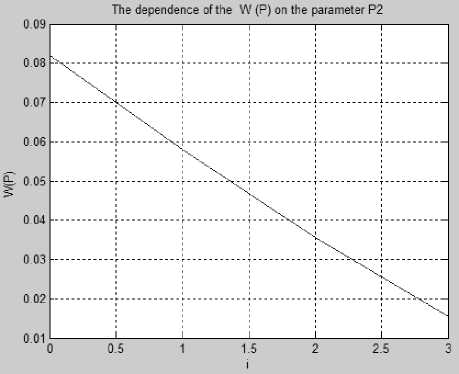
Рис. 3. Зависимость критерия w ( p ) от параметра р 2
за основу был однопараметрический подход градиентного спуска (для P 1 ). Производные вычислялись с помощью их конечно-разностных представлений W‘к ](Р) « ^^+7—^-^.
у
Для визуализации этапов наведения был применен простой гра-
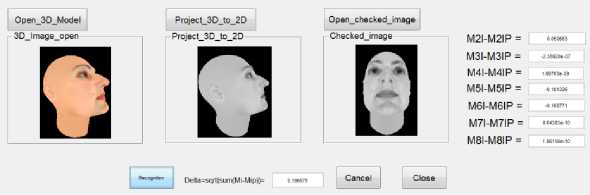
Рис. 4. Графический интерфейс системы наведения и сравнения фический интерфейс (рис. 4), в котором проекция 3D-модели сравнивалась с изображением, представленным справа с применением установленного критерия. Вычисления останавливались, когда значение функции W(Р) по абсолютной величине становилась меньше наперед заданного малого числа е.
Заключение
Представленный метод наведения 3D-модели объекта на 2D- изображение на основе инвариантных моментов имеет несколько преимуществ:
-
( 1 ) становится возможным анализ и распознавание изображений, полученных практически при произвольных ракурсах наблюдения объектов;
-
( 2 ) упрощается сама процедура сравнения изображений (проекции 3D-модели и 2D-изображения), поскольку пространство признаков сжимается до семи, а наличие инвариантов снимает проблему изменения положения изображения в плоскости наблюдения;
-
( 3 ) упрощается в целом процедура наведения за счет учета монотонности и унимодальности целевой функции, выбранной в качестве критерия качества.
Список литературы Метод наведения 3D-модели объекта на 2D-изображение на основе инвариантных моментов
- З. Т. Нгуен, М. В. Хачумов. Распознавание лиц по фотографиям на основе инвариантных моментов//Современные проблемы науки и образования, 2015, №2-2. С. 187, URL: http://www.scienceeducation.ru/129-23235
- N. M. Thakare, V. M. Thakare. "A Supervised Hybrid Methodology for Pose and Illumination Invariant 3D Face Recognition", International Journal of Computer Applications, V. 47. No. 25. 2012. P. 24-29.
- I. Sommer, O. Müller, F. S. Domingues, O. Sander, J. Weickert, T. Lengauer. "Moment invariants as shape recognition technique for comparing protein binding sites", Bioinformatics, V. 23. No. 23. 2007. P. 3139-3146.
- T. Suk, J. Flusser, B. Zitova. 3D rotation invariants, URL: http://zoi.utia.cas.cz/3DRotationInvariants
- З. Т. Нгуен. О задаче корректного сопоставления 3D-модели объекта с 2D-изображением//Труды IV Всероссийской научной конференции молодых ученых с международным участием "Информатика, управление и системный анализ", ИУСА-2016 (г. Тверь, 8-11 июня 2016 г.). С. 50-53.
