Метод обнаружения движущихся объектов на основе адаптивного метода фильтрации и применения теоремы Байеса для оценки изменений

Автор: Червяков Николай Иванович, Тупикин Александр Александрович
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии компьютерных систем и сетей
Статья в выпуске: 4 т.13, 2015 года.
Бесплатный доступ
Рассматривается новый метод обнаружения движущихся объектов в видеонаблюдении, который сочетает в себе адаптивный метод фильтрации с алгоритмом обнаружения изменений с применением теоремы Байеса. Сначала адаптивный алгоритм обнаруживает края движущихся объектов, затем, алгоритм с использованием теоремы Байеса корректирует их форму. Рассматриваемый способ имеет значительную устойчивость к шуму, тени, изменению освещенности, и повторных движений в фоновом режиме по сравнению с другими алгоритмами. В данном алгоритме обнаружение движения выполняется в адаптивной схеме, и предварительная информация о переднем и заднем планах не требуется. В ходе работы показано, что предложенный алгоритм вычислительно эффективен и подходит для работы с интернет видеонаблюдением и подобными приложениями.
Обнаружение, видеоинформация, теорема байеса, адаптивный фильтр
Короткий адрес: https://sciup.org/140191789
IDR: 140191789 | УДК: 004.93 | DOI: 10.18469/ikt.2015.13.4.07
Method for moving object detection based on adaptive filtration method and Bayes theorem application for changing estimation
We describe a new video surveillance method for moving objects detection. It combines adaptive filtration method together with algorithm for changing estimation based on Bayes theorem. At first adaptive algorithm localizes margins of moving object, and then algorithm corrects its form by Bayes theorem. In comparison to other approaches, proposed method is robust to noise, shadow, illumination variations and background repeated movements. Here moving detection is performed over adaptive scheme, therefore preliminary information on foreground and background is not need. We developed software based on proposed method and tested it on following situational video streams: street, office, store, fountain that confirmed its effectiveness. Developed method can be used for Internet video surveillance systems and other similar applications.
Текст научной статьи Метод обнаружения движущихся объектов на основе адаптивного метода фильтрации и применения теоремы Байеса для оценки изменений
В наше время, широко используются системы видеонаблюдения. Например, во многих приложениях, таких как мониторинг дорожного трафика, для обнаружения необычной активности в человеческой деятельности, подсчет количества объектов, и многое другое. Наиболее типичная схема системы видеонаблюдения включает в себя три следующие части.
-
1. Движущийся объект обнаружения.
-
2. Слежение за объектом.
-
3. Анализ его движения
Обнаружение областей, соответствующих подвижным объектам, является первым шагом обработки, поскольку остальные стадии обработки применяются уже локально к областям дви- жущихся объектов. Это говорит об актуальности выявления движущихся объектов из потока видеоинформации для систем наблюдения.
Существует множество алгоритмов обнаружения движения в потоке видеоинформации. Самые простые используют операцию пороговой разности интенсивности, например, соседних видеокадров или текущих и фоновых. Чаще всего результат работы этих алгоритмов не подходит для дальнейшего анализа. Чтобы повысить производительность, другие алгоритмы используют вероятностные модели и статистические тесты, которые используются для моделирования и извлечения фона. Их эффективность в значительной степени зависит от выбора порога. Более высокая производительность может быть получена путем модификации адаптирующегося порогового значения. Существует несколько методов пороговой адаптации. Наиболее успешными являются те, которые используют разности кадров и моделирование изменения меток в случайном марковском поле в байесовских рамках.
Были разработаны методы обнаружения на основе оценки апостериорного максимума (MAP) [1-3], которые используют сеть Маркова как априорные модели. MAP способствовала повышению производительности алгоритмов обнаружения изменений. Однако возросла их вычислительная сложность.
В данной работе предлагается метод обнаружения, в котором используется алгоритм активного шумоподавления (ANC) с локальной оценкой MAP. Активное шумоподавление в основном является альтернативой оценки исходных сигналов, испорченных шумами и помехами. В контексте обработки сигналов и изображений ANC обычно используется для удаления шума. В статье ANC используется для обнаружения движущихся объектов путем устранения шума, повторных движений фона, изменения освещения и теней. А оценки MAP оказываются в участках, соответствующих движущимся объектам, более компактными и гладкими, что делает вычислительную сложность метода ANC-MAP меньше, оставаясь при этом надежным и эффективным [4-5].
Алгоритм обнаружения, основанный на теореме Байеса
Цель метода обнаружения движения заключается в разделении каждого кадра в движении на сегменты. Это реализуется через генерирование маски Q, состоящей из двоичных меток для каждого пикселя M на сетке изображения. Метки принимают значение «u» (без изменений) или «c» (изменено). Для определения метки пикселя i сначала рассматриваются разности серого уровня между двумя последова тельными кадрами, а затем находятся маски изменений, которые максимизируют MAP оценку . Если предположить, что значения условно независимы и метки известны для всех элементов изображения, кроме i, оценка сводится к определению (u или с). В зависи мости от выбора будет две возможные маски изменения из В соответствии с теоре мой Байеса можно сделать вывод [5]:
и
3*№ m
с где t представляет собой пороговое значение для решения.
Чтобы сделать обнаружение более надежным, решение должно быть принято на основании разницы серого уровня на пиксель i и его соседних пикселей. Предположим нулевым гауссово распределение для разности значений и применим неравенство (1) к пикселям вокруг пикселя i , решающее правило может быть получено следующим образом [5]:
и
(2) ° и теи;
С где представляет собой шумовое стандартное отклонение различий серого уровня в неподвижных местах, предположительно постоянных в пространстве, является суммой квадратов разностей в рамках небольшого скользящего окна
, имея центр в i , T является адаптивным порогом, полученным из моделирования априорного знания по MRF. Этот адаптивный порог зависит от значений меток в окрестности пикселя, то есть уменьшается внутри измененных областей и увеличивается за пределами. Т определяется следующим образом [6]:
где выступает в качестве постоянной порога, B является положительно оцененным потенциалом, – количество измененных пикселей в окрестности 3×3 каждого пикселя. Чем выше число измененных пикселей, найденных в этом районе, тем ниже порог.
Рис. 1 показывает общую схему базового алгоритма обнаружения изменения. Выбираются два кадра, с помощью последовательного пиксельного сравнения выбирается окно, где происходит движение объекта, затем рассматривается массив пикселей движения. Обрабатывая их с помощью формулы (2), мы уточняем края движущегося изображения.
Несмотря на то что метод хорошо работает, внутренние части объекта не будут обнаружены в случае большой формы или медленных объектов. Кроме того, имеются значительные трудности с изменением условий освещения, в результате чего на практике каждое изменение рассматривается как событие движения.
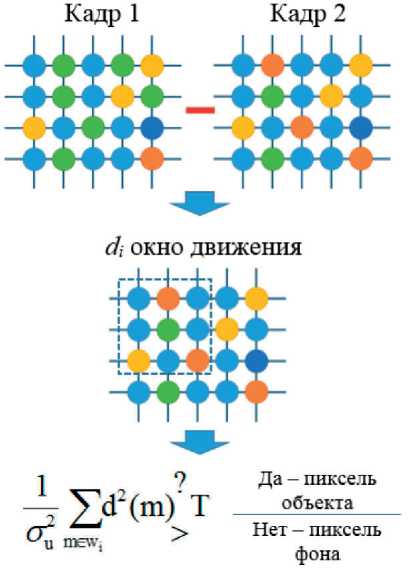
Рис. 1. Общая блок-схема алгоритма Байеса обнаружения изменений.
тивного фильтра. Адаптивный фильтр непрерывно корректирует свои коэффициенты, чтобы свести к минимуму сигнал ошибки [7].
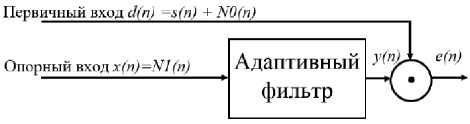
Рис. 2. Общая блок-схема АНК метода
Адаптивный фильтр может эффективно работать в неизвестных условиях и может отслеживать входной сигнал с изменяющимися во времени характеристиками. Существует несколько алгоритмов для того, чтобы настроить коэффициенты, такие как метод наименьших квадратов (LMS) или рекурсивный метод наименьших квадратов (RLS). В данной статье используется алгоритм LMS. Его выбор основан на простоте и быстрой сходимости. Этот алгоритм минимизирует сигнал ошибки Де2]. Алгоритм LMS приводит к рекуррентным соотношениям следующим образом [8]:
Активное подавление шума
Активное подавление шума – это метод оценки сигнала на добавленный шум или помехи. Хотя ANC основано на использовании только адаптивного фильтра, оно будет полезно в предлагаемом алгоритме. Согласно рис. 2 оно включает два входа: первичный d^ и опорный NXW- Первый представляет основной сигнал ф?] на фоне шума 7V0(/z). Опорный вход NyW представляет фильтрованную форму основного шума W В ANC опорный сигнал адаптивно фильтруют и вычитают из первичного, чтобы получить исходный сигнал (удаление шума). Выход будет сигнал ошибки (разница между d\n\, у [л]), который используется с помощью обратной связи для регулировки адап- w^n +1) = w(n) + ц e(zz) x(zz), (4)
где N – номер итерации; w – вектор коэффициентов адаптивного фильтра; Х – входной вектор; μ – положительная скалярная, называется размер шага.
Предлагаемый алгоритмдля обнаружения движения
В приложениях видеонаблюдения все чаще используются камеры с автоматическим изменением положения, масштаба и фокусировки. Это делает алгоритмы обнаружения, берущие за основу статический фон, не пригодными для таких систем. Основное отличие алгоритма от аналогов в предобработке изображения, для по-

Рис. 3. Схема работы разработанного алгоритма
лучения статического фона, и подборе функции вероятности в совокупности с марковскими процессами таким образом, чтобы пиксели переднего плана были наиболее вероятными, что делает алгоритм адаптируемым к подвижной системе видеонаблюдения.
Исходя из вышеописанного предлагается следующий алгоритм.
-
1. Анализ видеоряда для определения фона.
-
2. Выборка подходящих кадров изображения, кадр с объектом и кадр со статическим фоном.
-
3. К этим кадрам применяется алгоритм ANC для обнаружения краев движущихся объектов.
-
4. Применяется алгоритм обнаружения, основанный на теореме Байеса, с использованием скрытых марковских полей для классификации внутренней области движущегося объекта.
С кадра удаляется фон или выделяется движущееся изображение.

Рис. 4. Результат работы алгоритма
Результаты работы алгоритма представлены на рис. 4. Использовались разные ситуации, с разной степенью освещения и разным качеством изображения, несмотря на это алгоритм показывает стабильный результат работы благодаря адаптивному фильтру и выбору вероятностной функции, подходящей к конкретной ситуации.
Выводы
Разработан новый алгоритм для обнаружения движущихся объектов с использованием адаптивного подавления шума, основное отличие которого использование адаптивного фильтра. Это означает, что не требуется настройка системы видеонаблюдения под конкретные условия, эту роль выполняет фильтр.
Предлагаемый алгоритм обнаружения интегрирован с марковскими скрытыми полями для повышения производительности. Алгоритм отделяет фоновые пиксели на кадрах с движущимся объектом и удаляет фон. То, что осталось на выходе, будет приближение движущихся областей. Затем форма движущихся объектов улучшается с помощью алгоритма основанного на теореме Байеса.
Алгоритм очень эффективен в устранении шума, теней, изменения освещения и повторных движений фона. Высокую точность предложенного метода показали эксперименты в различных средах, а это очень значительный параметр для систем видеонаблюдения. Многообещающие результаты обнаружения и простота алгоритма делают предлагаемый способ подходящим для практической реализации в режиме реального времени.
Список литературы Метод обнаружения движущихся объектов на основе адаптивного метода фильтрации и применения теоремы Байеса для оценки изменений
- Migdal J., Grimson E.L. Background subtraction using Markov thresholds//IEEE Workshop Motion Video Computing 2, 2005. -P. 58-65 DOI: 10.1109/ACVMOT.2005.33
- Sheikh Y., Shah M. Bayesian mod//IEEE Trans. Pattern Anal. Mach. Intell. 27(11), 2005. -P. 1778-1792 DOI: 10.1109/TPAMI.2005.213
- Yu S.Y., Wang F., Xue Y.F., Yang J. Bayesian moving object detection in dynamic scenes using an adaptive foreground model//J. Zhejiang Univ. (Sci.) 10(12), 2009. -P. 1750-1758 DOI: 10.1631/jzus.A0820743
- McHugh J.M., Konrad J., Saligrama V., Jodoin, P. Foreground-adaptive background subtraction//IEEE Signal. Process Lett. 16, 2009. -P. 390-393 DOI: 10.1109/LSP.2009.2016447
- Aach T., Kaup A. Bayesian algorithms for adaptive change detection in image sequences using Markov random fields//Signal Process Image Comm. 7(2), 1995. -P. 147-160 DOI: 10.1016/0923-5965(95)00003-F
- Aach T., Kaup A., Mester R. Statistical model-based change detection in moving video//Signal Process. 31, 1993. -P. 165-180 DOI: 10.1016/0165-1684(93)90063-G
- Singh A. Adaptive noise cancellation//Undergraduate B.E. project report Netaji Subhas Institute of Technology, 2001. -P. 50-61.
- Ramadan Z. Error vector normalized adaptive algorithm applied to adaptive noise canceller and system identification//J. Eng. Appl. Sci. 3(4), 2010. -Р. 710-717 DOI: 10.3844/ajeassp.2010.710.717
