Метод обработки изображения неба с целью идентификации звезд

Автор: Гладышев Анатолий Иванович, Евенко Александр Валериевич, Гедзюн Виктор Станиславович, Жуков Александр Олегович, Захаров Анатолий Иванович, Прохоров Михаил Евгеньевич, Давидович Юрий Александрович, Тучин Максим Сергеевич
Рубрика: Информатика и вычислительная техника
Статья в выпуске: 1, 2019 года.
Бесплатный доступ
В статье представлен новый метод к обработке изображения неба с целью идентификации звезд. Идея метода основана на том, чтобы в бортовом каталоге (малого объема) для каждой звезды записать некоторую дополнительную информацию из каталога большого размера, которая относится к сравнительно небольшой окрестности навигационной звезды.
Идентификация звезд, изображение неба, навигационный паспорт звезд
Короткий адрес: https://sciup.org/148309517
IDR: 148309517 | УДК: 681.5:629.78 | DOI: 10.25586/RNU.V9187.19.01.P.147
Image processing method of the sky to identify stars
The article presents a new method for processing images of the sky to identify stars. The idea of the method is based on the fact that in the onboard catalog (small volume) for each star to record some additional information from the catalog of large size, which refers to a relatively small surrounding area of the navigation stars.
Текст научной статьи Метод обработки изображения неба с целью идентификации звезд
С появлением космических аппаратов активно разрабатываются и совершенствуются средства и методы навигации по наблюдениям звезд, Земли, Солнца, астероидов и др. [4; 8; 15; 18].
* Статья подготовлена при финансовой поддержке гранта президента (проект МД-4052.2018.8 «Методы получения и обработки внеатмосферной информации для обнаружения и идентификации космических объектов в широком спектральном диапазоне»).
148 Выпуск 1/2019
Высокие скорости перемещения космических аппаратов диктуют высокие требования к оперативности таких определений, особенно на начальном участке после выведения на орбиту, когда положение аппарата неизвестно.
В настоящее время приборы звездной ориентации стали основным средством космической навигации. Конструкция типичного звездного датчика ориентации содержит входную оптику, которая ограничивает поле зрения прибора, матричного фотоприемника и электронного блока определения ориентации с каталогом звезд [20].
Методы обеспечения ориентации космических аппаратов, принципы построения астроизмерительных систем, обзор их основных производителей и технических характеристик этих приборов, а также функциональная структура блоков звездного датчика описаны в статьях [9; 10].
Сложность определения ориентации заключается в том, что в поле зрения прибора звездной ориентации попадает только несколько звезд, а их привязка к координатной системе и положение космического аппарата в момент наблюдения неизвестны. Поэтому главными локальными признаками для определения звезд всегда было опознавание известных созвездий по их форме и нахождение звезд по месту в них. Традиционно для этого использовались известные навигационные созвездия [2].
Известны способы определения ориентации по наблюдениям звезд, реализуемые в навигационных приборах [11; 14; 19]. Сущность этих методов заключается в том, что наблюдают группу звезд, образующих треугольник, в поле зрения прибора звездной ориентации, измеряют расстояния между звездами и по величине этих расстояний находят в бортовом каталоге соответствующую группу звезд и их координаты, а относительно них определяют положение оптической оси прибора звездной ориентации. Сложность заключается в том, чтобы найти этот треугольник среди множества других на звездном небе.
Также при обработке полученных измерений негативную роль играет фоновая обстановка околоземного космического пространства [5; 6; 7].
Из всего многообразия алгоритмов идентификации как наиболее быстродействующие используют геометрические. Идея геометрических алгоритмов заключается в составлении из звезд, попавших в поле зрения объектива, различных геометрических фигур, в которых в качестве базовых характеристик для распознавания используются межзвездные угловые расстояния, сферические углы, образуемые звездами на небесной сфере, отношения сторон, периметры, площади и прочие характеристики, с последующим сравнением их с таковыми же, но полученными для звезд из каталога, заранее записанными в память компьютера [3].
Основным недостатком всех этих способов является именно необходимость перебора большого числа параметров в бортовом каталоге для нахождения требуемой конфигурации звезд. При большом числе звезд в бортовом каталоге, даже при большой скорости процессора, этот перебор занимает некоторое время, что может быть критично для космического аппарата.
Известны также различные способы, позволяющие повысить эффективность определения ориентации по звездам [13; 16; 17].
Однако эти способы не решают проблем необходимости перебора вариантов и ориентации на начальном этапе выведения, а также дополнительно увеличивают объем требуемых определений.
Гладышев А.И. и др. Метод обработки изображения неба с целью... 149
При рассмотрении перспектив развития приборов звездной ориентации отмечается, что подход к выбору оптики звездных приборов пока остается неизменным. Полагают целесообразным включение в состав звездных приборов ориентации миниатюрных трехосных датчиков угловой скорости, а в блоках электроники – использование высокопроизводительных микропроцессоров, программируемых логические интегральные схемы (ПЛИС) со специальным математическим обеспечением. Для эффективного определения ориентации значимым является требование многократного сокращения объема обрабатываемой информации. Прибор должен представлять собой функционально законченное устройство и иметь при этом весьма малые габариты и низкое энергопотребление. Улучшение эксплуатационных характеристик приборов возможно путем совершенствования схемных решений и программно-математического обеспечения [1; 12].
Идея предлагаемого метода заключается в том, чтобы в бортовом каталоге (малого объема) для каждой звезды записать некоторую дополнительную информацию из каталога большого размера, которая относится к сравнительно небольшой окрестности навигационной звезды. Будем называть такую дополнительную информацию паспортом звезды, рассчитанным по большому каталогу.
Поле паспорта звезды (ППЗ) – числовая характеристика, которая может быть рассчитана по заданному алгоритму для звезд при использовании конкретной числовой информации, которая, с одной стороны, содержится в каталогах, а с другой – может быть получена по измерениям кадра звездного датчика (ЗД).
ППЗ делятся на реальные и идеальные. Идеальные ППЗ могли бы быть рассчитаны исходя из данных гипотетического идеального каталога или измерений в идеальном кадре, содержащих информацию обо всех нужных звездах с их точными характеристиками. Значения реальных ППЗ могут отличаться от идеальных за счет разнообразных ошибок, неполноты реального каталога, из-за погрешностей измерений в кадре, наличия в реальном кадре звездообразных и протяженных помех.
От ППЗ требуется:
-
• локальность вычисления (т.е. возможность расчета ППЗ по небольшому участку кадра);
-
• большая вариабельность по небу и/или локальная;
-
• устойчивость к помехам;
-
• слабая чувствительность к погрешностям.
Тип ППЗ определяется значениями числовых характеристик (взятых из каталога или измеренных) и алгоритмом их обработки (условиями применения, весовыми коэффициентами и пр.).
Поле паспорта навигационной звезды (ППНЗ) – ППЗ, которое может быть рассчитано для навигационных звезд по большому каталогу, включающему информацию о звездах до необходимой величины. Идеальное ППНЗ можно рассчитать лишь по информации из гипотетического идеально полного и точного каталога.
Поле паспорта объекта кадра (ППОК) – ППЗ для почти любого звездообразного объекта в кадре ЗД, которое может быть рассчитано по информации, содержащейся только в самом кадре ЗД.
ППОК также делятся на реальные и идеальные. Идеальным назовем ППОК, рассчитанное при отсутствии погрешностей измерений и при 100%-м обнаружении объектов.
150 Выпуск 1/2019
Значение реального ППОК может отличаться от идеального вследствие погрешностей измерений (случайных, систематических или связанных с физическими свойствами объекта, например переменностью) и наличия помех в кадре: постоянных (например, планет или астероидов) и переменных (например, яркая пылинка или след космической частицы).
Паспорт объекта кадра (ПОК) – многомерный вектор, координаты которого состоят из заранее определенных типов ППОК, рассчитанных для паспортизуемого звездообразного объекта в кадре. Идеальный ПОК составлен из идеальных ППОК. Реальный ПОК имеет координаты, образованные из реальных ППОК.
Паспорт навигационной звезды (ПНЗ) – многомерный вектор, координаты которого состоят из заранее определенных типов ППНЗ, рассчитанных для паспортизуемой навигационной звезды. Идеальный ПНЗ составлен из идеальных ППНЗ. Реальный ПНЗ имеет координаты, образованные реальными ППНЗ.
При правильной идентификации звезд идеальные паспорта навигационных звезд и идеальные паспорта соответствующих им объектов в кадре совпадут (обратное – неверно).
Поскольку каждое ППЗ (ППНЗ или ППОК) рассчитывается с ошибкой, следовательно, даже в том случае, когда объект в кадре является изображением навигационной звезды, их паспорта могут отличаться.
Назовем допустимым интервалом ППЗ совокупность его возможных значений с учетом ошибок и неполноты каталога, использованного для расчета (для ППНЗ), или погрешности измерения, недостатков обнаружения и помех в реальном кадре (для ППОК).
Будем считать, что ПНЗ и ПОК совпадают, если для допустимых интервалов всех ППНЗ обнаружено пересечение с допустимыми интервалами соответствующих ППОК.
В предложенном методе паспорт состоит из следующих 8 полей:
1-е поле – блеск паспортизуемой звезды;
2-е поле – число звезд, находящихся в окрестности 120 пикселей от паспортизуемой звезды;
3-е поле – число звезд, находящихся в окрестности 110 пикселей от паспортизуемой звезды;
4-е поле – число звезд, находящихся в окрестности 100 пикселей от паспортизуемой звезды;
5-е поле – число звезд, находящихся в окрестности 80 пикселей от паспортизуемой звезды;
6-е поле – число звезд, находящихся в окрестности 60 пикселей от паспортизуемой звезды;
7-е поле – число звезд, находящихся в окрестности 35 пикселей от паспортизуемой звезды;
8-е поле – расчетный средний (в условных единицах) поток от звезд с блеском, меньшим 10-й звездной величины, находящихся в окрестности 120 пикселей от паспортизуемой звезды.
Кроме паспорта, для каждой звезды в навигационный каталог еще записываются 8 индексов (номеров по бортовому каталогу навигационных звезд (БКНЗ) или смещений в каталоге) для навигационных звезд из соседних с ней секторов навигационного каталога (S1...S8). Отметим, что соседние сектора могут принадлежать разным зонам.
Гладышев А.И. и др. Метод обработки изображения неба с целью... 151
На каждого соседа надо 3 байта: номер зоны – 2 байта + 4 бита, номер сектора – 4 младших бита.
В целом комплекс алгоритмов первоначальной идентификации звезд по паспортам содержит три вновь созданных алгоритма: идентификация объекта, вычисление паспорта объекта, проверка идентификации.
Рассмотрен алгоритм идентификации объекта в кадре сравнением его паспорта с паспортом навигационной звезды. Назначение алгоритма: поиск и проверка идентификации объектов в кадре с навигационными звездами в каталоге. Входные данные: список объектов из кадра, отсортированный по уменьшению сигнала от объекта. Выходные данные: признак идентификации (состояния: «Идентификации нет» и «Идентификация успешна»), число идентифицированных пар (объект в кадре – звезда в БКНЗ), ссылка на матрицу преобразования координат, ссылка на список идентифицированных пар (каждая пара состоит из ссылки на навигационную звезду и ссылки на соответствующий ей объект).
Описание алгоритма идентификации объекта в псевдокоде по шагам приведено ниже.
-
1. Начальные инициализации переменных и списков.
-
2. Цикл по объектам:
-
2.1. Выбираем объект кадра – первый в списке в порядке очередности. Проверяем признаки «помеха» и «паспорт неполон»; если хотя бы один из них установлен, то перебор всех объектов в кадре закончен (выходим из алгоритма с признаком идентификации «идентификации нет»).
-
2.2. Проверяем «навигационность» выбранного объекта (т.е. может ли объект быть навигационной звездой: попадает ли он в интервал допустимых звездных величин и т.п.). Если объект не может быть навигационной звездой, устанавливаем признак «помеха», перемещаем текущий объект в конец списка объектов и переходим к шагу 2.1.
-
2.3. Вычисляем ПОК объекта из кадра и его допуски.
-
2.4. Если хотя бы один бит в признаке «паспорт неполон» установлен, то перемещаем объект в конец списка объектов и переходим к шагу 2.1.
-
2.5. Обращаемся к базе данных навигационного каталога звезд для поиска по паспортному индексу в допустимой окрестности. Получаем список навигационных звезд (кандидаты по паспорту), имеющих ПНЗ, который совпадает с ПОК. Выборка может оказаться пустой, так как объект в кадре мог не быть навигационной звездой. В этом случае мы помечаем текущий объект кадра признаком «помеха», перемещаем текущий объект в конец списка объектов и переходим к шагу 2.1.
-
2.6. Цикл по кандидатам по паспорту (если выборка кандидатов по паспорту не пуста):
-
2.6.1. Вызываем процедуру проверки идентификации.
-
2.6.2. Проверяем результат идентификации. Если результат положительный, то выходим из алгоритма идентификации (с флагом «идентификация удачна»).
-
-
2.7. Конец цикла 2.6 (по кандидатам по паспорту).
-
2.8. Помечаем текущий объект кадра признаком «помеха», перемещаем его в конец списка объектов и переходим к шагу 2.1.
-
-
3. Конец цикла 2 (по объектам).
-
4. Конец алгоритма.
152 Выпуск 1/2019
Далее рассмотрим алгоритм вычисления паспорта объекта . Назначение алгоритма: вычисление паспорта объекта в кадре. Входные данные: ссылка на список объектов в кадре ссылка на указатель текущего объекта. Выходные данные: ППОК для текущего объекта установленные признаки.
В псевдокоде алгоритм приведен ниже.
-
1. Заполняем ППОК, зависящий только от самого объекта (функция потока). Инициализируем нулем биты в признаке «паспорт неполон».
-
2. Цикл по полям паспорта (кроме первого поля):
-
2.1. Проверяем условие вычислимости текущего ППОК. Если условия вычислимости не выполнены, то устанавливаем соответствующий ППОК бит в признаке «паспорт неполон» и переходим к следующему полю паспорта.
-
2.2. Инициализируем значение текущего ППОК.
-
2.3. Цикл по всем объектам кадра в списке объектов кадра (кроме первого элемента списка):
-
2.3.1. Вычисляем расстояние от первого объекта в списке до текущего.
-
2.3.2. Вычисляем текущее значение ППОК, зависящее от первого и текущего объектов, проверяя условия для данного ППОК (например, ограничения на расстояния, ограничения на поток от текущего объекта и т.п. ограничения). Вычисляем ошибки элемента ППОК.
-
-
2.4. Конец цикла 2.3.
-
2.5. Преобразуем текущее значение ППОК по алгоритму вычисления ППОК. Вычисляем оценку ошибку и ППОК.
-
-
3. Конец цикла 2.
-
4. Конец алгоритма.
Ниже в псевдокоде приведен алгоритм проверки идентификации . Назначение алгоритма: проверка предполагаемой идентификации объекта с навигационной звездой. Входные данные: ссылка на кандидата по паспорту, список объектов в кадре, ссылка на текущий объект. Выходные данные: признак идентификации, число отождествленных пар, ссылка на матрицу преобразования координат, ссылка на список отождествленных пар.
-
1. Инициализация переменных и списков.
-
2. Цикл по соседям кандидата по паспорту:
-
2.1. Вычисляем расстояние между кандидатом по паспорту и его текущим соседом.
-
2.2. Цикл по объектам кадра:
-
2.2.1. Проверяем совпадение ППНЗ, зависящего только от самой звезды (функцию потока), с соответствующим ППОК всех объектов списка. Если нет совпадения, переходим к следующему объекту.
-
2.2.2. Для совпадающего объекта сверяем расстояние между ним и текущим объектом (выбираем из таблицы или вычисляем, если еще не вычисляли) с расстоянием между кандидатом по паспорту и текущим соседом (по каталогу). Если совпадения нет, переходим к следующему объекту.
-
2.2.3. Если паспорта совпали, то вычисляем матрицу преобразования из координатной системы каталога в координатную систему кадра и обратную к ней.
-
2.2.4. Находим «предполагаемые» небесные координаты центра поля зрения. Обращаемся к алгоритму поиска по координатному индексу навигационного каталога звезд в одноградусном окружении центра кадра.
-
-
-
2.2.5. Инициализируем счетчик отождествленных пар.
-
2.2.6. Цикл по выбранным навигационным звездам (список не может быть пуст):
-
2.2.6.1. Вычисляем координаты в кадре для текущей выбранной навигационной звезды. Если координаты указывают вне кадра, переходим к следующей выбранной навигационной звезде.
-
2.2.6.2. Цикл по всем объектам в кадре:
-
2.2.6.2.1. Проверяем условия совпадения координат и блеска текущей выбранной звезды и текущего объекта в кадре. Если совпадения нет, переходим к следующему объекту.
-
2.2.6.2.2. Формируем из ссылок на текущий объект и текущую звезду запись в списке отождествленных пар. Увеличиваем счетчик отождествленных пар.
-
-
2.2.6.3. Конец цикла по объектам в кадре.
-
-
2.2.7. Конец цикла по выбранным навигационным звездам.
-
2.2.8. Если в кадре обнаруживается на требуемых координатах не менее 10 отождествлений навигационных звезд, то выходим из алгоритма с установленным признаком идентификации «идентификация успешна».
-
2.3. Конец цикла по объектам.
-
3. Конец цикла по соседям.
-
4. Установка признака идентификации «идентификации нет».
-
5. Выход.
-
6. Конец алгоритма.
Гладышев А.И. и др. Метод обработки изображения неба с целью... 153
Алгоритмы обладают следующими достоинствами:
-
• дополнительная информация пропорциональна числу навигационных звезд, входящих в бортовой каталог;
-
• сам алгоритм требует лишь одной проверки паспорта на каждый объект в кадре. Или меньше, если отождествление не будет найдено раньше, чем закончится список объектов в кадре.
Таким образом, возможно использование нескольких видов паспортов звезд (рис. 1).
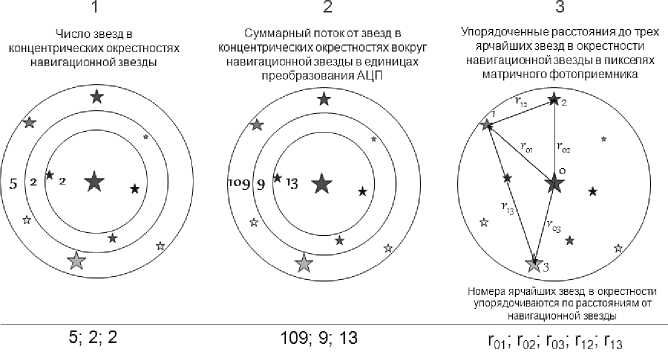
Рис. 1. Виды навигационных паспортов звезд
Список литературы Метод обработки изображения неба с целью идентификации звезд
- Никифоров М.Г., Захаров А.И., Прохоров М.Е., Галушина Т.Ю., Жуков А.О. Оценка возможности практической реализации автономной навигации космических аппаратов в дальнем космосе по астероидам // Механика, управление и информатика. 2015. Т. 7, № 2 (55). С. 311-322.
- Прохоров М.Е., Захаров А.И., Жуков А.О., Миронов А.В., Стекольщиков О.Ю. Солнечный датчик на основе интерференционной оптической системы // Механика, управление и информатика. 2015. Т. 7, № 2(55). С. 142-147.
- Жуков А.О., Нароенков С.А., Николаев А.В. Информационная система хранения, обработки и распространения данных о малых телах Солнечной системы // Т-Comm - Телекоммуникации и транспорт. 2011. № 11. С. 75-78.
- Жуков А.О., Захаров А.И., Прохоров М.Е., Бирюков А.В., Стекольщиков О.Ю., Тучин М.С., Шахов Н.И., Гладышев А.И. Комплексные системы ориентации космических аппаратов и контроль внутренней метрологии // Сборник трудов Второй Всероссийской научно-технической конференции молодых конструкторов и инженеров. Серия «Минцевские чтения» / Московский государственный технический университет им. Н.Э. Баумана. 2015. С. 206-215.
- Федосеев В.И., Колосов М.П. Оптико-электронные приборы ориентации и навигации космических аппаратов. М.: Логос, 2007.
