Метод обработки видеосигналов для измерения скорости протяженных объектов

Автор: Васин Николай Николаевич, Куринский Вадим Юрьевич
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии компьютерных систем и сетей
Статья в выпуске: 2 т.8, 2010 года.
Бесплатный доступ
Приводится описание метода обработки видеосигналов для систем измерения скорости движения протяженных объектов. Описан метод определения величины смещения железнодорожного состава в плоскости регистрирующего прибора (ПЗС-матрицы цифровой видеокамеры), функционирование предложенного метода.
Метод обработки видеосигналов, автоматизированная система измерения скорости движения протяженных объектов, совокупность строк видеоизображения, смещение гистограмм текущего и последующего кадров, повышение точности измерения
Короткий адрес: https://sciup.org/140191390
IDR: 140191390 | УДК: 681.3
Method of processing of video signals for measurement of speed of extended objects
The description of a method of processing of video signals for systems of measurement of speed of movement of extended objects is resulted. The method of defi nition of size of displacement of the train in planes of the registering device (the PZS-MATRIX of a digital video-camera), functioning of the offered method is described
Текст обзорной статьи Метод обработки видеосигналов для измерения скорости протяженных объектов
Постановка задачи
Известный метод измерения скорости движения протяженных объектов [1-2] базируется на определении смещения протяженного объекта за период следования кадров. Его недостатком является низкая скорость вычислений, поскольку производится обработка всего кадра, и высокая погрешность измерения параметров протяженного объекта, обусловленная вибрацией видеокамеры, вызванной движущимся объектом измерения. Предлагаемый метод характеризуется высокой производительностью за счет обработки только части видеоизображения и повышенной точностью измерения скорости движения протяженного объекта при наличии вибрации видеокамеры, вызванной движением контролируемого объекта.
Оптическая ось видеокамеры устанавливается перпендикулярно направлению движения объекта. Направление движения объекта, его начало, расстояние до видеокамеры – известны. В качестве примера протяженного объекта выбраны вагоны, роспуск которых производится на сортировочной горке.
Метод определения величины смещения объекта
Для определения величины смещения вагона или другого подвижного объекта за известное время τ следования кадров видеокамеры на текущем i -ом кадре выделяется совокупность строк видеоизображения, то есть выделяется горизонтальная полоса по всей длине кадра, с количеством Х пикселей по длине кадра, и высотой n пикселей. Полоса выделяется в области видеоизображения, где происходит отображение движения протяженного объекта. На данной горизонтальной полосе выделяется прямоугольная область, размер которой составляет m × n , где n – высота прямоугольной области в пикселях, m – длина в пикселях (см. рис. 1).
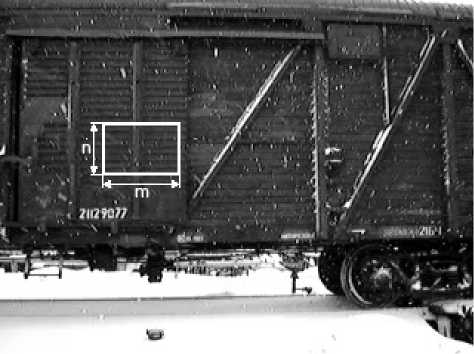
Рис.1. Выделение прямоугольной области i -го кадра
Вследствие движения объекта на кадре i + 1 его изображение смещено относительно первого на некоторую величину Δ s , что видно из приведенного рис. 2.

Рис. 2. Горизонтальная полоса кадра i +1
При известном расстоянии от видеокамеры до объекта легко определить перемещение S самого объекта [1-2] за время τ следования кадров и, следовательно, скорость движения объекта V = S /τ. Величина смещения Δ s изображения i + 1 кадра, согласно предлагаемому методу, определяется не для всего кадра, а только для горизонтальной полосы, координаты которой соответствуют координатам полосы i -го кадра (рис. 2).
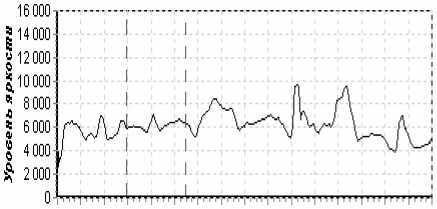
Для выделенной горизонтальной полосы кадра i -го производится расчет гистограммы по следующему правилу: по всей длине полосы для каждого столбца шириной в один пиксель производится суммирование уровня яркости всех n пикселей. Полученная при этом гистограмма суммарных уровней яркости столбцов полосы изображения приведена на рис. 3.

Рис. 3. Гистограмма изображения полосы i -го кадра
Для выделенной горизонтальной полосы (рис. 2) следующего i +1 кадра также производится расчет гистограммы по аналогичному правилу: по всей длине Х выделенной горизонтальной полосы для каждого столбца шириной в один пиксель производится суммирование уровня яркости всех n пикселей (cм. рис. 4).
О 20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320
Координата X изображения
Рис. 4. Гистограмма изображения полосы кадра i + 1
Из гистограмм рис. 3-4 видно, что они сдвинуты относительно друг друга на некоторую величинуΔ s . Поэтому для определения величины Δ s необходимо сместить гистограммы (или их часть) относительно друг друга с тем,чтобы различие между ними было минимально.
Как было указано выше,в левой части горизонтальной полосы текущего i-го кадра (рис. 1) выделяется прямоугольная область размером m×n, которой соответствует часть гистограммы, расположенная между вертикальными сплошными линиями (рис.3). С указанной областью и производится сравнение аналогичных (равных по площади) прямоугольных областей выделенной полосы кадра i + 1. Для этого горизонтальная полоса кадра i + 1 разбивается на X-m аналогичных прямоугольных областей,размерыкоторых m×n аналогичны(равны) выделенной прямоугольной области i-го кадра.Эти области в дальнейшем называются аналогичными. Аналогичные области выделяются по всей длине выделенной горизонтальной полосы,начиная с нулевой координаты слева,двигаясь в правую сторону с шагом в один пиксель.Таким образом,координаты соседних аналогичных областей по горизонтальной оси отличаются на 1 пиксель,а ширина каждой области равна величине m.Набор этих областей образуют линейный массив q прямоугольных областей (рис. 5).Для каждой из аналогичных областей выделяется соответствующий участок гистограммы горизонтальной полосы следующего i + 1 кадра.
1 пиксель

Рис. 5. Массив q прямоугольных областей
Сравнение выделенной прямоугольной об-лас-ти текущего i -го кадра и каждой аналогичной области горизонтальной полосы следующего i + 1 кадра производится по следующему алгоритму: вычисляется сумма значений квадратов разности между элементами гистограммы выделенной прямоугольной области текущего i -го кадра и соответствующими элементами гистограммы аналогичной прямоугольной области горизонтальной полосы следующего i + 1 кадра:
Qq ) =
t. (hi ( f ) - h i +1, q ( f ^
. f =1
где f – номер столбца прямоугольной области шириной в один пиксель и высотой n пикселей; h ( f ) – сумма уровня яркости пикселей в рамках столбца f ; q – номер аналогичной прямоугольной области.
Минимальное значениемассива Q ( q )соответс-твует аналогичной прямоугольной области, которая по своим характеристикам наиболее подобна выделенной прямоугольной области на текущем i -ом кадре. Такая прямоугольная область называется подобной эквивалентной областью. Гистограмма подобной эквивалентной прямоугольной области представлена на рис. 4 вертикальными пунктирными линиями.
На рис. 6 представлена графическая зависимость уровня совпадения (различия) гистограмм i -го кадра и кадра i + 1 от их относительного смещения. Минимальное значение различия от относительного смещения гистограмм соответствует наибольшему совпадению сравниваемых гистограмм, когда Q ( q ) будет минимально.
Таким образом, существует смещение гистограмм текущего и последующего кадров относительно друг друга, когда различие гистограмм сравниваемых областей полос текущего и последующего кадров будет минимальным. Значение относительного смещения Δs и будет характеризовать скорость движения объекта.

Рис. 6. Уровень совпадения гистограмм
За период следования кадров τ объект перемещается по горизонтали на расстояние S , а соответствующее объекту изображение смещается на Δ s пикселей.
Для определения смещения Δ s изображения объекта необходимо:
-
- найти координаты левого нижнего угла выделенной прямоугольной области текущего i -го кадра ( xi , yi );
-
- найти координаты левого нижнего угла правдоподобной эквивалентной прямоугольной области следующего i + 1 кадра ( xi +1 , yi +1 );
-
- найти корень квадратный из суммы квадратов разностей ординат и абсцисс соответственно:
A s = V ( x i - x i + 1 ) 2 + ( y i - y i + 1 ) 2 .
Для определения физической скорости движения протяженного объекта используется формула
V = 3,6 As Fps — ^-k-
X 1 + k
L tg ⎜
где Δ s – смещение изображения протяженного объекта за время смены кадров; Fps – скорость кадров в секунду; X – ширина кадра в пикселях; k – коэффициент соотношения сторон кадра; L – расстояние от объектива видеокамеры до протяженного объекта; α – угол обзора видеокамеры.
Повышениеточностиизмерения скорости
Смещение изображения при наличии вибрации видеокамеры, вызванной движением объекта,в общем случае может составлять не- сколько пикселей. Поэтому вокруг подобной эквивалентной области на следующем кадре i + 1 выделяется расширенная прямоугольная область, высота которой равна n + 2 пикселей (от n – 1 до n + 1 пикселей), а длина составляет m + 2 пикселей (от m – 1 до m + 1 пикселей), тем самым, получается расширенная прямоугольная область с центральным элементом, соответствующим найденной прямоугольной подобной эквивалентной области. Кроме центрального элемента внутри расширенной прямоугольной области выделяется новый массив q из 8-ми аналогичных прямоугольных областей, смещенных на один пиксель относительно центрального элемента (влево, вправо, вверх, вниз). Для каждой из этих областей рассчитываются гистограмма и сумма значений квадратов разности, как описано выше. После этого вновь вычисляется минимальное значение массива Q(q). Если вновь найденное минимальное значение меньше ранее найденного минимального значения, соответствующего подобной эквивалентной области, то такая аналогичная область, в свою очередь, становится подобной эквивалентной областью. После чего повторно выделяется расширенная прямоугольная область с высотой n + 2 пикселей и длиной m + 2 пикселей вокруг новой найденной подобной эквивалентной прямоугольной области. Цикл повторяется до тех пор, пока новое найденное минимальное значение не будет больше ранее найденного минимального значения подоб- ной эквивалентной прямоугольной области. Значение смещения изображения следующего i + 1 кадра относительно текущего i-го, соответствующее минимальному значению Q(q), принимается за результат измерения смещения изображения в Δs пикселей.
На основе предложенного метода была разработана и испытана автоматизированная система измерения скорости движения протяженных объектов.Испытания проводились на сортировочной станции Кинель Куйбышевской железной дороги. Измерялась скорость движения отцепов (вагонов) на сортировочной горке.Погрешность измерения не превышала 5%.
Список литературы Метод обработки видеосигналов для измерения скорости протяженных объектов
- Васин Н.Н., Куринский В.Ю. Метод измерения скорости движения железнодорожных вагонов на сортировочной горке//ИКТ. Т3, №1, 2005. -С. 40-44.
- Васин Н.Н., Куринский В.Ю. Обработка видеосигналов для измерения скорости движения железнодорожных объектов на сортировочной горке//Компьютерная оптика. №27, 2005. -С.185-188.
- Способ измерения скорости движения протяженных объектов//Васин Н.Н., Куринский В.Ю. Заявка № 2009112710/28(017334) от 06.04.2009. Решение о выдаче патента на изобретение.
