Метод оценивания угла фазового сдвига и мгновенной частоты квазигармонических сигналов в режиме реального времени

Автор: Никитин А.В., Станкевич Д.А.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Численные методы и анализ данных
Статья в выпуске: 6 т.48, 2024 года.
Бесплатный доступ
В работе предложен и исследован метод оценивания угла фазового сдвига между двумя квазигармоническими сигналами и их мгновенной частоты по малому интервалу наблюдения. Разработанный метод позволяет в реальном масштабе времени исследовать динамику угла фазового сдвига и мгновенной частоты. Сформулированы условия, при которых оценки частоты и угла сдвига фазы устойчивы при наличии амплитудной и частотной модуляции. Получены аналитические выражения для погрешностей оценок в зависимости от параметров сигналов и уровня нормального шума. Предлагаемый метод затрачивает малое количество вычислительных операций и может быть использован в автономных системах, где вычислительные ресурсы, как правило, ограничены.
Квазигармонический сигнал, угол фазового сдвига, мгновенная частота
Короткий адрес: https://sciup.org/140310424
IDR: 140310424 | DOI: 10.18287/2412-6179-CO-1442
Method for real-time estimation of phase-shift angle and instantaneous frequency of quasi-harmonic signals
In this paper, a method for estimating the phase shift angle between two quasi-harmonic signals over a small observation interval is proposed and investigated. The developed method allows us to study the dynamics of phase angle and instantaneous frequency in real time. Conditions under which the phase angle estimation is stable in the presence of amplitude and frequency modulation are formulated. Analytical expressions for estimation errors depending on signal parameters and normal noise level are obtained. The proposed method involves a small number of computing operations and can be used in autonomous systems, where computational resources are usually limited.
Текст научной статьи Метод оценивания угла фазового сдвига и мгновенной частоты квазигармонических сигналов в режиме реального времени
Оценка параметров сигналов, близких к гармоническим, по конечной выборке является фундаментальной проблемой во многих приложениях, включая радиолокацию, гидролокацию, связь, акустику и оптику [1–4]. Задача определения полной фазы сигнала также возникает при исследовании синхронизации в сложных колебательных системах различной природы [5]. Сюда относятся, например, методы адаптивной глубокой стимуляции мозга [6], которые широко используются для лечения болезни Паркинсона и других неврологических расстройств. Для их эффективного применения требуется настройка параметров стимуляции в соответствии с фазой и амплитудой периферического или нейрофизиологического сигнала, вычисляемых в режиме реального времени [7]. Популярный подход к оценке нестационарной полной фазы и амплитуды заключается в использовании преобразования Гильберта или вейвлет-преобразования [8]. Однако эти методы плохо подходят для анализа в реальном времени, тогда как оперативная оценка полной фазы и амплитуды часто имеет решающее значение для управления сложными системами. Как правило, на основании информации о системе можно выдвинуть физически обоснованные предположения о модели сигнала, а также о скорости и диапазоне изменения его параметров.
Метод
Рассмотрим два квазигармонических сигнала с различными огибающими, полные фазы которых отличаются на постоянную величину ψ :
x1(t)=X1(t)cos(θ(t)), x2(t)=X2(t)cos(θ(t)+ψ),
удовлетворяющих физически обоснованному предположению о непрерывности, ограниченности амплитуд и мгновенной частоты ω ( t ) и всех их производных
d θ ( t )
0< ω m ≤ω ( t )= dt
0< X m ≤ X 1,2 ( t ) ≤ X M ,
d k ω ( t ) dtk
dkX 1,2 ( t ) dtk
≤ ω ( t ) ω k B ,
≤ X 1,2 ( t ) ω kX ,
где k = 1, 2,…, ω m , ω M – границы возможных значений мгновенной частоты и ω B < ω M , X m , X M – границы возможных значений амплитуд сигналов, ω B , ω X – максимальные частоты фазового и амплитудного спектра (причем ω X < ω M ) соответственно. В работе [9] показано, что при выполнении условий (1) в силу теоремы Пэли–Винера функция θ ( t ) представима сходящимся на всей числовой оси рядом Тейлора и имеет финитный спектр, носитель Θ ( Ω ) которого принадлежит отрезку [– ω B , ω B ]:
ω B
θ ( t ) = ∫ Θ ( Ω )exp( i Ω t ) d Ω .
-ω B
В этом случае такое квазигармоническое представление является единственным, то есть полная фаза и амплитуда сигналов x 1 ( t ), x 2 ( t ) определены однозначно. Предположим, что полные фазы и огибающие отвечают следующим условиям медленности изменения [9, 10]:
го ( t ) = 0 ( t ) - ци 2( t ), X i - ц X i ( t ) го ( t ), X 2 — ц X 2 ( t ) го ( t ), 0 < ц < 1.
Заметим, что условия медленного изменения параметров не накладывают ограничения на ширину спектра сигнала. Иными словами, сигнал может иметь широкий спектр за счет существенного, но медленного изменения мгновенной частоты и/или амплитуды.
Выберем временной интервал T , удовлетворяющий условию го T < п, и запишем значения сигналов в точках t , ( t – T ) и ( t – 2 T ):
%i (t - kT) = Xi cos(0 - к го T) + 51 (t - kT), x2(t -mT) = X2 cos(0 -mгоT + v) + 52(t -mT).
Здесь индексы k и m принимают значения 0, 1, 2; введены обозначения X 1 = X i ( t ), X 2 = X 2 ( t ), 0 = 0 ( t ) и го = го ( t ), а величины 5 1 ( t ) и 5 2 ( t ) являются отклонениями от гармонической модели, вызванными непостоянством частоты и амплитуд на временном интервале [ t –2 T , t ] и наличием аддитивного шума. Построим следующие произведения значений сигналов:
a km ( t ) = Х 1 ( t - kT ) x 2 ( t - mT ) =
= X i X 2 cos( 0 + (1 - k ) го T ) x (3)
x cos( 0 + (1 - m ) го T + v ) + a km ( t ).
Новые величины a km ( t ) также являются погрешностями, которые обусловлены наличием исходных отклонений 5 1 ( t ), 5 2( t ) от модели гармонического сигнала.
Рассмотрим три сочетания произведений (3):
bi (t) = a02 (t) - a20 (t) ® 2X1 X2 sin(гoT) cos(гoT) sin(v) + ₽1 (t), b2 (t) = aoi (t) - a10 (t) + a12 (t) - a21 (t) ® 2X1 X2 sin(гoT) sin(v) + 02 (t), (4)
b3 (t) = 2an(t) - a02 (t) - aM (t) « 2X1X2 sin2(гoT) cos(v) + ₽3 (t), где введены следующие обозначения 01= a02( t )-a20( t), 02( t) = a01( t) - aw( t) + a12( t) - a21( t), 0з( t ) = 2an( t)- a02( t)- a20( t). Легко убедиться, что из этих сочетаний можно построить следующие оценки параметров сигнала:
~ 1 I ^( t ) 1
го = — arccos ----- ® го + 5ш ( t ),
T ^ b 2 ( t ) J
, | Ь2(t) • v = arctgl —-Sin(гo T) b(t)
= arctg
= v + 5 v ( t ).
Для того, чтобы иметь возможность получать оценку разности фаз в диапазоне [- п , п ], функцию arctg в выражении (6) нужно вычислять с учетом знаков b 2 ( t ) и b 3 ( t ).
Ошибка оценки частоты 5Ш ( t ) имеет вид
-0 1 ( t ) + cos( гo T Щ t )
2 X 1 X 2 T sin2( гo T )sin( v ).
Из-за наличия в знаменателе синуса частоты и фазы наблюдается сингулярность этой ошибки на краях диапазона частот ( го = 0 и го = го / T ), а также при v = 0 и v = ±п . Ошибка оценки разности фаз определяется выражением:
5 v ( t ) =
- cos( гo T ) cos( v ) 0 1 ( T ) + cos( v ) 0 2 ( t ) - sin( гo T ) sin( v ) 0 3 ( t )
Видно, что в отличие от ошибки оценки частоты (7) сингулярности при v = 0 и v = ±п в выражении (6) не наблюдается, но ошибка оценки разности фаз (8) также растет на краях частотного диапазона. Численные эксперименты полностью подтверждают выражения (5 – 8).
Перейдем к реализации введенных оценок методами цифровой обработки сигналов. Пусть сигналы подвергнуты дискретизации с шагом А < п / го . Обозначим x [ n ]= x ( n А ) и предположим, что условия (2) выполняются на интервале [( n - L +1), n А ], где L = 2 Q + M . Параметр Q > 1 назовем коэффициентом прореживания. Он необходим в случае, когда частота дискретизации 2 п / А существенно превышает частоту сигналов, – об этом говорят погрешности (7) и (8). Параметр M > 1 имеет смысл количества усреднений при расчете сочетаний (4). Тогда произведения (3) примут следующий вид:
a km [ l ] = x 1 [ l - kQ ] x 2 [ l - mQ ] =
= X 1 X 2 cos( 0 - го ( n - 1 + kQ ) А ) x x cos( 0 - го ( n - 1 + mQ ) A + v ) + a km [ l ], l = n - M +1,..., n .
Здесь обозначено 0 = 0( n А). Суммируя эти произ- ведения по индексу l, получим:
n MX 1 X 2
A km [ n ]= > , a km [ l ] = x l = n - M + 1 2
x cos(гo( k - m) Q А + v) +

MX 1 X 2
x cos( гo ( M - 1 + kQ + mQ ) А- 2 0-v ) + £ a km [ l ].
l = n - M + 1
Следует отметить, что A12[n] = A01[n – Q], A21[n] = A10[n – Q] и A11[n] = A00[n – Q], а суммы (9) можно рассчитывать рекурсивно: Akm [П] = Akm [n -1] - am [n - M] + am [n], что позволяет существенно сокр атить количество операций при их вычислении. Комбинации (4) теперь будут описываться следующими выражениями:
n
B1[n] = Ao2[n]- A20[n] = 2MX1 X2 sin(®QA)cos(®QA)sin(y) + £ (a02[l]-a20[l]), l=n - M+1
B 2 [ n ] = A o 1 [ n ] - A io [ n ] + A 1 [ n - Q ] - A io [ n - Q ] =
n
= 2 MX i X 2 sin( ® Q A )sin( y ) + £ ( a oi [ l ] -aw [ l ] + a oi [ l - Q ] -aw [ l - Q ] ) , l = n - M + 1
n
B3 [n] = 2Aoo [n - Q] - Ao2[n] - AM [n] = 2MXiX2 sin2(®QA) cos(y) + £ (2aoo [l - Q] - ao2 [l] - a2o [l]), l=n - M +1
а оценки частоты и разности фаз примут вид:
1 _ I B 1 [ n ] 1
® [ n ] = arccos ®® + om [ n ],
Q A V B 2 [ n ] J
V [ n ] = arctg
I
B 2 [ n ]
В з [ n ]
v
1 1 [ B 1 [ n ] ] \ V B 2 [ n ] J
V + \ [ n ].
Здесь введены следующие обозначения для дискретизированных функций ошибок:
n
£ (( a o1 [ l ] -aw [ l ] + a 12 [ l ] -a 21 [ l ])cos( ® Q A ) -a o2 [ l ] + a 2o [ l ])
5 m [ n ] = ^ ^ n - M ^--------------------------------------------------------------
2 X 1 X 2 Q A sin 2 ( ® Q A ) sm( v )
n
£ (2 an [ l ] -a o2 [ l ] -a 2o [ l ])sin( v ) . .
-
5, [ n ] = - ™ +--- Cos^--- x
-
v 2 X 1 X 2 sin> Q A ) 2 X 1 X 2 sin3( ® Q A )
На рис. 1 приведена структурная схема аппаратной реализации предложенного метода. Для расчёта очередной оценки частоты и угла фазового сдвига по рекурсивной схеме требуется 9 умножений 16 сложе- ний и вычисления трех функций: arccos(x), arctg(x / y) и квадратного корня. Также требуется пять массивов памяти по M ячеек, два массива – по 2Q ячеек и ещё два объёмом Q ячеек.
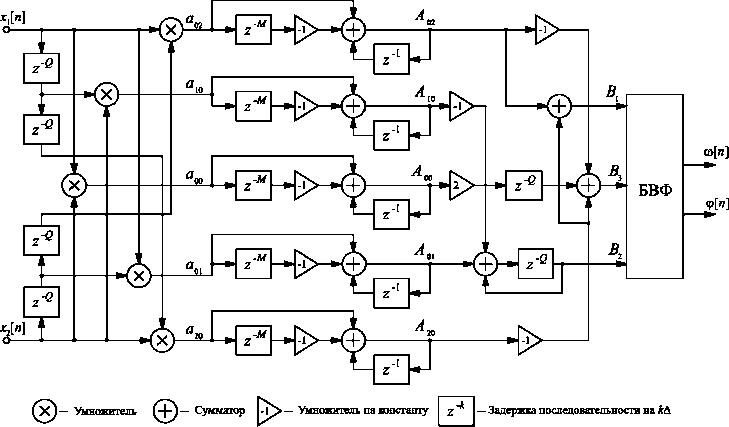
Pис. 1. Структурная схема аппаратной реализации рекурсивного оценивания частоты и угла фазового сдвига. На схеме прямоугольник БВФ обозначает блок вычисления функций
Таким образом, с помощью предложенного метода можно наблюдать динамику изменения во времени оценок частоты (10) и угла фазового сдвига (11), обновляя их значения с получением каждой очередной пары отсчетов сигналов x 1 [ n ] и x 2 [ n ]. Полученные значения оценок соответствуют середине скользящего окна [( n – L +1), n ]. Неограниченный рост ошибки определения частоты при у^- 0 можно скомпенсировать. Если оценка разности фаз мала, для определения частоты следует использовать отсчеты одного из исходных сигналов (например – x 1 [ n ]) и отсчеты вспомогательного сигнала x 3 [ n ] = x 2 [ n – S ], то есть искусственно ввести дополнительную разность фаз: ш S А .
При расчёте оценок частоты (5) и угла фазового сдвига (6) можно также применять метод наименьших квадратов. Введём новые обозначения:
n
Cij[n]= L bi[l]bj[l], l=n - M +1
где b i,j [ l ] – дискретные образы выражений (4); например, сочетание C 12 [ n ]равно
C 12 [ n]= L ( a 002 V ] - a 20 [ l ])( O »[ l ] - M l ] + a 12 [ l ] — a 21 [l D- l=n - M + 1
Используя новые сочетания, с помощью метода наименьших квадратов построим следующие оценки мгновенной частоты и угла сдвига фазы:
^v
ю [ n ]
= arccos
Q А
^*
v [ n ]
( C 12 [ n ] 1
I C 22 [ n ] J ’
C 23 [ n ] 1
C 33 [ n ] V
( C 12 [ n ] 1
I C 22 [ n ] J
Численное моделирование показало, что дисперсия этих оценок совпадает с дисперсией оценок, полученных по формулам (10) и (11), а смещение примерно в 100 раз больше. Кроме того, для оценок (12) потребуется в M раз больше сложений и умножений.
Результаты и обсуждение
Для проверки полученных соотношений был проведен ряд численных экспериментов. На рис. 2 и рис. 3 показаны зависимости среднеквадратичных отклонений ошибок определения частоты и разности фаз в зависимости от юА при у = 0,85 и в зависимости от у при юА =1,445. Обрабатывалось L = 2 Q + M ( Q + 1, M =55) отсчетов сигналов с постоянными амплитудами X 1 = 1,04 и X 2 = 1,32 и аддитивным нормальным шумом ( o i = 0,11 и а 2 = 0,095), использовалось 100 реализаций. На рис. 3 сплошной линией показана граница Рао–Крамера, вычисленная для этих условий.
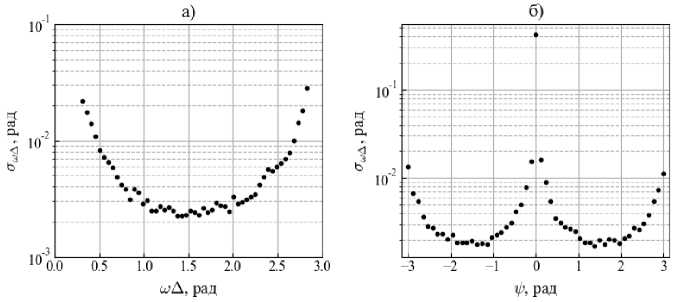
Pис. 2. Зависимость СКО ошибки оценки частоты от частоты сигналов (а) и разности фаз (б)
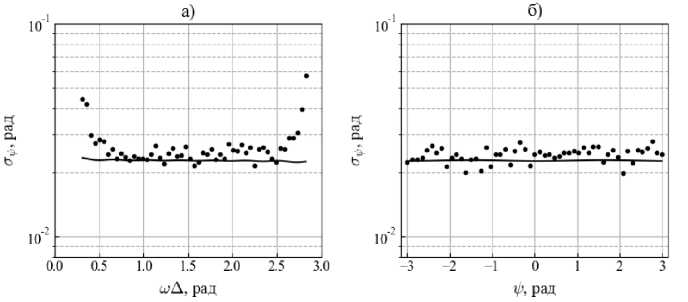
Pис. 3. Зависимость СКО ошибки оценки угла сдвига фазы от частоты сигналов (а) и разности фаз (б)
Численное моделирование показало, что оптимальное значение частоты сигналов находится в диапазоне п /5 <юА< 4п /5. При выполнении этого усло- вия оценка угла сдвига фазы обладает минимальной дисперсией, которая близка к границе Рао–Крамера. На практике удовлетворить этому условию можно соответствующим выбором частоты дискретизации и коэффициента прореживания Q.
Как уже отмечалось, достоинством предлагаемого метода является его устойчивость при одновременном наличии амплитудной и частотной модуляции. Следующий численный эксперимент заключался в обработке сигналов с тональной амплитудной и частотной модуляцией и аддитивным шумом (см. рис. 4), описываемые следующими моделями:
x 1 [ n ]= X 1
1 + Y1sinI —nЛ + ф1 I Isin(0[n]) + ^1[n], x2[ n ]= X2 1 + y2sin n Л+ф2 sin(0[ n ] + у) + ^2[ n ],
I IT2
где полная фаза и частота определяются выражениями
I v,,T„
0 [ n ] = 0 0 + ® o n Л + --- sin n Л + фи
I 2nl
и [ n ] = и 1 + ym cos n Л + ф , n = 0,..., N - 1.
I l T J)
В моделировании использовались следующие параметры: X 1 = 1,0, X 2 = 1,4, d = 0,04, 0 2 = 0,019, Y 1 = 0,1, Y 2 = 0,32, T 1 = 630 Л , T 2 =1780 Л , ф 1 = 0, ф 2 = 0, 0 0 = 0,11, Ю 0 = 0,132, уи = 0,428, T и = 2100 Л , ф и = 0,11 и у = 0,815. При обработке применялось скользящее окно длительностью L =2 Q + M = 106 ( Q = 13, M=80).
На рис. 5 показаны исходные и восстановленные законы изменения частоты и разности фаз. В диапазоне от ( L –1)/2 до N –( L –1)/2 ошибки определения частоты и разности фаз не превышают 0,0088 и 0,023 соответственно.
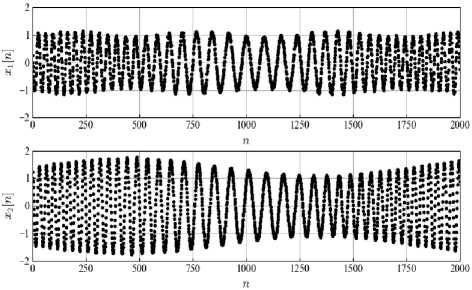
Pис. 4. Модельные сигналы x 1 [n] и x 2 [n] с медленно меняющимися амплитудами и частотой
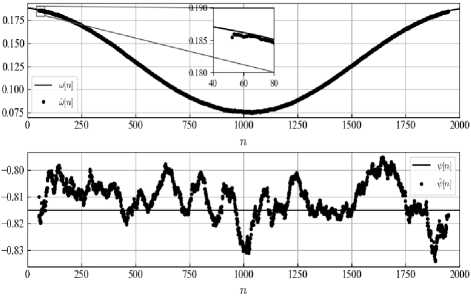
Pис. 5. Исходные и восстановленные законы изменения частоты и разности фаз
Заключение
Предлагаемый метод является «методом реального времени», поскольку ему требуется малое количество вычислительных операций по сравнению с другими методами, и он позволяет получать очередные оценки частоты и угла фазового сдвига за интервал дискретизации Л . В работе [11] приводится сравнение производительности методов оценивания полной фазы сигналов. Так, например, алгоритм, использующий дискретное преобразование Гильберта, потребует чуть больше 2 M операций сложения и столько же умножений, где M – длина окна усреднения.
Описанный метод может быть реализован на базе недорогого современного микроконтроллера или ПЛИС при частотах дискретизации до нескольких мегагерц. Например, популярный контроллер серии STM32F4xx имеет встроенный математический сопроцессор и позволяет выполнять умножения и сложения чисел с плавающей запятой одинарной точности за 1 такт; деление и извлечение квадратного корня за 14 тактов. Согласно официальной документации [12], на вычисление функции arccos с помощью алгоритма CORDIC потребуется около 350 тактов. Табличный метод позволит увеличить скорость вычисления функции, но для реализации потребуются допол- нительные затраты памяти программ для хранения таблиц значений. Большим достоинством предлагаемого метода является независимость количества операций от длины скользящего окна L. Это позволяет в процессе измерения регулировать параметр L (как коэффициент прореживания Q, так и количество усреднений M) в случае, когда значительно меняется скорость изменения измеряемых величин, то есть ввести в процесс элемент адаптации.
