Метод определения дальности воздушного объекта пассивным однопозиционным оптико-электронным комплексом

Автор: Стучилин А.И., Иванов А.С.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 5 т.13, 2020 года.
Бесплатный доступ
В статье описан метод и приведена формула для определения дальности воздушного объекта (ВО) пассивным однопозиционным оптико-электронным комплексом (ОЭК). Так как в воздушном пространстве отсутствуют какие-либо маркеры и метки, в качестве калибровочной меры расстояния используются собственные размеры воздушного объекта. Определение углового положения ВО относительно ОЭК осуществляют косвенным методом на основе анализа его двумерного изображения на фотоприемной матрице (ФМ) и сопоставления полученных данных с данными, хранящимися в базе. Определение линейных размеров изображения ВО также основано на косвенном методе получения необходимых данных путем анализа изображения ВО и сравнения его с изображениями эталонной 3D-модели ВО.
Оптико-электронный комплекс, определение дальности во, определение углового положения во в пространстве относительно оэк, определение длины проекции фюзеляжа во, идентификация во
Короткий адрес: https://sciup.org/146281641
IDR: 146281641 | УДК: 629.73+681.7 | DOI: 10.17516/1999-494X-0231
The Method of Air Object Range Finding by Means of the Passive Single-Position Optoelectronic Complex
The article is devoted to description of the method and the formula concerning air object (AO) range finding by means of the passive single-position optoelectronic complex (OEC). As there are no markers and signs in the air space, an air object proper size is used as a gauging distance unit. Determination of AO angular position relative to the OEC is carried out by the indirect method based on the analysis of its two-dimensional image on the photodetecting matrix and collation of the obtained data with the data held in the database. Determination of AO image linear dimensions is also based on the indirect method of required data obtaining by means of AO image analysis and its collation with AO reference 3D-model.
Текст научной статьи Метод определения дальности воздушного объекта пассивным однопозиционным оптико-электронным комплексом
Цитирование: Стучилин, А.И. Метод определения дальности воздушного объекта пассивным однопозиционным оптико-электронным комплексом / А.И. Стучилин, А.С. Иванов // Журн. Сиб. федер. ун-та. Техника и технологии, 2020. 13(5). С. 554-567. DOI: 10.17516/1999-494X-0231
возможности оперативно калибровать оптическое устройство ОЭК путем его перемещения на требуемые расстояния; третьи – из-за невозможности их применения в реальном режиме работы ОЭК.
Поэтому требуется разработка такого метода определения дальности до ВО, который позволял бы решать поставленную задачу в реальном режиме времени от кадра к кадру без дополнительных операций по калибровке оптического устройства однопозиционного пассивного ОЭК. В [16] показано, что в пассивном однопозиционном ОЭК определение дальности D [км] до ВО при известных их размерах осуществляется на основании выражения:
D = -^2_
LOOO^o’ где f [мм] – фокусное расстояние объектива оптического устройства ОЭК; Lво [м] – размер ВО; lво [мм] – ширина проекции ВО на ФМ.
Видно, что в качестве калибровочной меры при определении дальности до ВО в воздушном пространстве, лишенном каких-либо меток и маркеров, выступают его собственные габаритные характеристики. Таковыми характеристиками могут быть размах крыла Lkp , длина фюзеляжа L ф ВО (рис. 1).
В [17] показано, что наиболее предпочтительной в качестве калибровочной меры для определения дальности до ВО является длина его фюзеляжа. Это обусловлено тем фактором, что форма фюзеляжа обладает инвариантностью к ракурсу наблюдения ВО, что обеспечивает в большинстве случаев наблюдения ВО в пространстве относительно ОЭК однозначность опре-
Рис. 1. Габаритные характеристики ВО
Fig. 1. AO overall dimensions
деления длины проекции ВО на ФМ и, соответственно, более высокую точность определения дальности до ВО.
В полете положение ВО относительно ОЭК постоянно изменяется. Соответственно, изменяется и длина проекции фюзеляжа ВО на ФМ. На рис. 2 изображено, что при расположении ВО под какими-либо углами к линии визирования ОЭК длина проекции его фюзеляжа 1 ф на изображении меньше длины проекции фюзеляжа при расположении ВО в пространстве по нормали к линии визирования ОЭК, что соответствует максимальной длине его проекции 1 фм на ФМ (рис. 3).
Поэтому для правильного определения дальности до ВО необходимо учитывать угловые параметры положения ВО в полете относительно ОЭК: углы рыскания, тангажа и крена, которые определяется как углы между осями связанной (0XYZ) системы координат и земной ( OX g Y g Z g ). Центр 0 связанной системы осей координат помещен в центр масс ВО, ось 0X направлена от хвостовой к носовой части ВО, ось 0Z перпендикулярна оси 0X , направлена в сторону правой консоли крыла ВО, ось 0Y перпендикулярна плоскости X0Z и направлена вверх (рис. 4).
Рис. 2. Вид проекции ВО на фотоприемной матрице
Fig. 2. AO projection image on photodetecting matrix
Рис. 3. Вид проекции ВО при положении к линии визирования ОЭК по нормали
Fig. 3. AO projection image in case of its normal position to the OEC line of sight
Рис. 4. Положение ВО относительно Земли в связанной системе координат
Fig. 4. AO position relative to the Earth in the fixed coordinate system
Так как для решения задачи определения дальности до ВО необходимо знать углы ориентации ВО в связанной системе координат относительно линии визирования ОЭК, а не земной поверхности, то будем использовать понятия углов псевдорыскания ψ' и псевдотангажа θ' . Необходимость использования данных параметров вызвана тем, что если во время полета ВО располагается под какими-либо углами относительно Земли, то относительно ОЭК эти углы будут иметь другие значения (рис. 5–7). При этом нуль углов псевдорыскания ψ' и псевдотангажа θ' соответствует направлению полета ВО, когда ось ОХ связанной системы координат направлена по линии визирования на ОЭК.
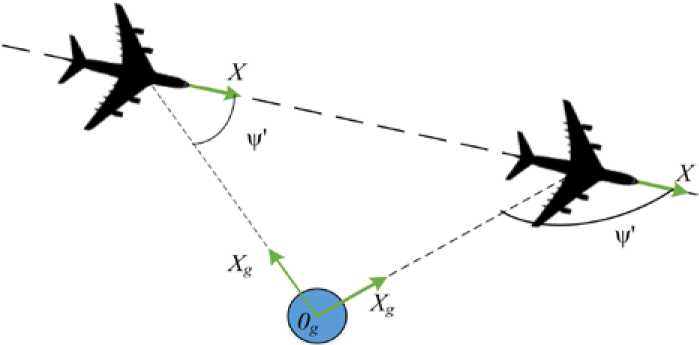
Рис. 5. Угол псевдорыскания ВО ψ ' при движении относительно ОЭК
Fig. 5. AO pseudoyawing angle ψ ’ when moving relative to OEC
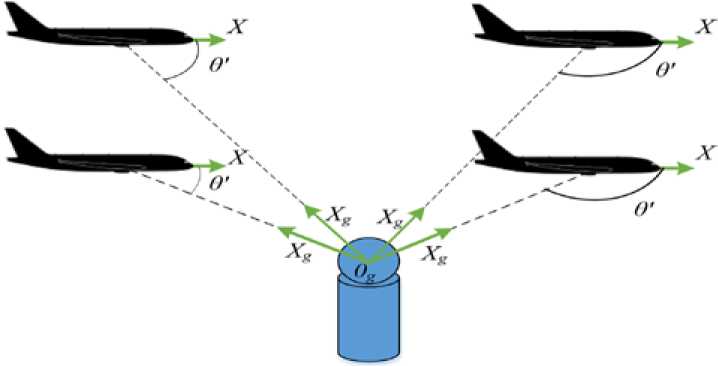
Рис. 6. Угол псевдотангажа ВО θ' при движении относительно ОЭК
-
Fig. 6. AO pseudopitching angle θ’ when moving relative to OEC
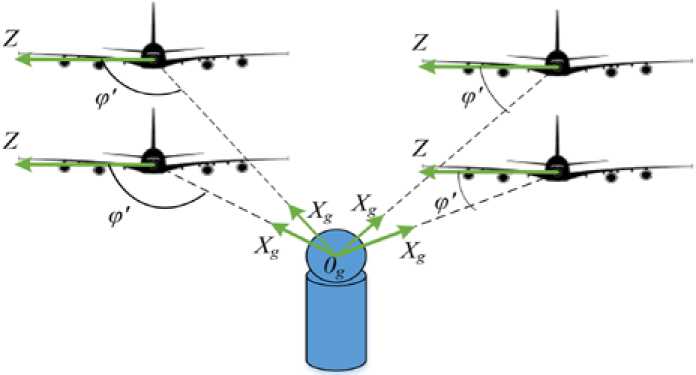
Рис. 7. Угол псевдокрена ВО φ' при движении относительно ОЭК
-
Fig. 7. AO pseudoswinging angle φ’ when moving relative to OEC
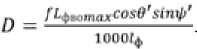
Учет положения ВО относительно ОЭК осуществляется путем условного поворота фюзеляжа ВО до нормали к линии визирования ОЭК следующим образом:
^фВО = рвотах COS д' SOT ф*, где LфВОmax [м] – длина фюзеляжа ВО согласно его техническому паспорту; θ' [рад] – угол псевдотангажа ВО; ψ' [рад] – угол псевдорыскания ВО.
С учетом (2) выражение (1) запишем в следующем виде:
Для определения дальности до ВО согласно (3) необходимо знать длину фюзеляжа конкретного типа ВО L ф ВОmax согласно его техническому паспорту, положение ВО в пространстве относительно ОЭК: углы псевдорыскания ^' и псевдотангажа 9' , а также длину проекции фюзеляжа ВО на изображении l ф .
Максимальную длину фюзеляжа ВО L ф ВОтах , как паспортное значение для каждого конкретного типа ВО, заносят в таблицу данных реляционной базы данных ОЭК и вызывают для расчетов по первичному ключу, соответствующему типу этого ВО. Определение типа ВО осуществляется автоматически на основе работы алгоритмов сверточных нейронных сетей [18] или полуавтоматически на основе экспертно-аналитического метода идентификации ВО [19, 20].
Значения параметров положения ВО в пространстве относительно ОЭК (углы псевдорыскания ^' и псевдотангажа 9' ) определяют косвенным методом на основе сравнения характеристик изображения реального ВО на ФМ и изображения его цифровой 3D-модели [21]. Такой подход выбран в связи с тем, что провести прямые измерения угловых параметров положения ВО в пространстве с помощью пассивного однопозиционного ОЭК не представляется возможным. Также невозможно определить эти параметры и по двумерному изображению ВО на ФМ.
Суть метода определения угловых параметров положения ВО в пространстве относительно ОЭК заключается в сравнении относительных характеристик изображения этого ВО, полученного на ФМ, с характеристиками эталонных изображений его 3D-модели, находящимися в таблице данных характеристик таких изображений базы данных ОЭК. При совпадении характеристик изображения реального ВО на ФМ с какими-либо характеристиками эталонного изображения 3D-модели этого ВО принимается решение о соответствии положения ВО в пространстве относительно ОЭК положению ВО с конкретными значениями углов псевдорыскания ψ' и псевдотангажа θ' . В результате из базы данных характеристик эталонных изображений 3D-модели ВО вызываются соответствующие значения углов псевдорыскания V и псевдотангажа 9' .
Для работы метода предварительно необходимо подготовить требуемые данные. Первоначально создается 3D-модель конкретного типа ВО, которая является его точной электронной копией. Такая 3D-модель для конкретного типа реального ВО считается для него эталонной и используется для наработки базы данных характеристик эталонных изображений ВО, соответствующих его различным положениям в пространстве. Наработка такой базы данных осуществляется путем вращения 3D-модели ВО по углам рыскания, тангажа и крена с заданным шагом вращения. При этом эталонное изображение 3D-модели ВО должно быть вписано в прямоугольник, стороны которого описывают крайние точки изображения ВО и параллельны сторонам фотоприемной матрицы и экрана компьютера, на котором производится подготовка данных (рис. 8).
Эталонное изображение 3D-модели ВО бинаризируется путем перевода в черно-белый цвет, где один цвет соответствует проекции модели ВО, а другой - оставшейся площади прямоугольника. По полученному таким образом изображению определяют первичные ключи базы данных характеристик эталонных изображений 3D-модели ВО при различных ее положениях в пространстве: доля площади ВО на изображении SВО д [%], координаты центра масс этой площади x цм , у цм , а также ширина W и высота H изображения ВО [пикс], коэффициенты отношения – 560 –

Рис. 8. Изображение 3D-модели воздушного объекта типа Airbus A-380
Fig. 8. AO 3D-model image of Airbus A-380 type
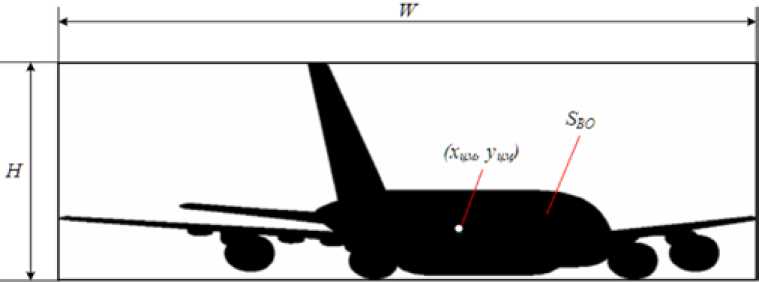
Рис. 9. Характеристики изображения воздушного объекта
Fig. 9. AO image features
ширины и высоты изображения ВО к значениям соответствующих координат центра масс K x и Ky , коэффициент отношения ширины изображения к его высоте KWH . Значения характеристик эталонных изображений 3D-модели ВО S ВО , x цм , y цм , W и H определяют с помощью специализированного программного обеспечения в результате обработки изображения 3D-модели ВО (рис. 9).
Доля площади ВО SВО Д и соответствующие коэффициенты определяются по следующим формулам:
5вод = ^Ю0%,
К,
К, ti^ J
н
Уцн
Kwh - н
В соответствующую таблицу данных базы данных характеристик эталонных изображений 3D-модели ВО для каждого положения 3D-модели ВО в пространстве записывают соответствующие значения углов псевдорыскания ψ' и псевдотангажа θ'. Для каждого конкретного типа ВО формируется своя таблица данных эталонных изображений 3D-модели ВО.
Длина горизонтальной проекции фюзеляжа реального ВО на ФМ l ф определяется следующим образом. Перед измерением длины проекции фюзеляжа реального ВО на ФМ l ф изображе- – 561 –

Рис. 10. Вид изображения реального ВО на ФМ при оконтуривании
Fig. 10. Actual AO image (contoured) on photodetecting matrix
ние ВО оконтуривают по крайним точкам прямоугольником, стороны которого параллельны сторонам ФМ. Очевидно, что прямое измерение длины проекции фюзеляжа реального ВО на ФМ l ф практически невозможно. Это связано с трудностями точного выделения на двумерном изображении ВО на ФМ изображения фюзеляжа, когда ВО находится в пространстве под какими-либо углами относительно ОЭК (рис. 10).
Поэтому после оконтуривания изображения реального ВО на ФМ измеряют не длину горизонтальной проекции фюзеляжа 1 ф , а ширину проекции ВО w p при его определенном положении в пространстве.
Для оптического устройства ОЭК справедливо утверждение: размер ВО пропорционален ширине проекции ВО w p с коэффициентом пропорциональности, равным масштабу изображения m оэк оптического устройства ОЭК .
Масштаб изображения т оэк определяется как отношение расстояния до ВО D к главному расстоянию c (фокусное расстояние объектива f + дополнительный сдвиг для обеспечения фокусировки Jf ). Он также может быть определен как отношение размера ВО L ВО к соответствующему его размеру на ФМ, в данном случае к ширине его проекции на ФМ w p . При этом предполагается, что плоскость, в которой производится полет ВО, параллельна плоскости ФМ, что справедливо при больших дальностях полета ВО по сравнению с фокусным расстоянием оптического устройства ОЭК.
тоэк
Тогда формула для определения дальности до ВО запишется в виде у _ (/■*Jf)L„„maxco$9,sin^' _ (/t^n^orna*™*^!^
1000wp
10001*
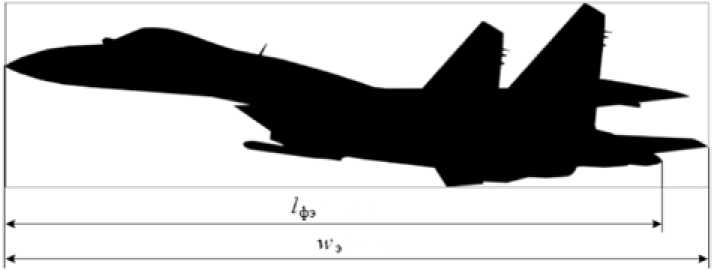
Рис. 11. Вид изображения эталонной 3D-модели ВО
Fig. 11. AO reference 3D-model image
Для перехода от параметра ширина проекции ВО на ФМ w p к параметру длина горизонтальной проекции фюзеляжа l ф воспользуемся свойством подобия изображений реального ВО на ФМ и его эталонной 3D-модели при одном и том же положении ВО и эталонной 3D-модели в пространстве относительно линии визирования ОЭК. При этом имеет место свойство пропорциональности значений ширины изображения реального ВО на ФМ w p и изображения эталонной 3D-модели этого ВО wэ на экране компьютера, на котором осуществляется обработка этой модели, к соответствующим длинам проекций фюзеляжа l ф и l фэ (рис. 10 и 11).

где w э [мм] – ширина изображения эталонной 3D-модели ВО; w р [мм] – ширина проекции реального ВО на ФМ; l фэ [мм] – длина горизонтальной проекции фюзеляжа эталонной 3D-модели ВО; l ф [мм] – длина горизонтальной проекции фюзеляжа реального ВО на ФМ.
Из (9) определим выражение для l ф :

После подстановки (10) в (8) выражение (8) преобразуется в следующий вид:
(J*4f)L^romexcose'sin*'w3 lOOOf^.Wp
Значения l ф э , l ф эmax и w э эталонного изображения 3D-модели ВО определяются с помощью специализированного ПО и записываются в базу данных характеристик эталонных изображений 3D-модели ВО на этапе подготовки данных, как это описано ранее.
Учитывая, что
<фэ = ЦвтахСОЗО'зГПф*, после подстановки (12) в (11) преобразуем в выражение вида q _ Ц+АЛЦеотах*:» 1000/ф,,п^дкУр
Таким образом, выражение (13) позволяет определить дальность до ВО, не определяя значения угловых параметров положения ВО в пространстве. Эти значения косвенно заложены в значениях ширин изображений ВО и его эталонной 3D-модели.
Значения длины фюзеляжа изображения l ф эмах и ширины w э эталонной 3D-модели ВО, ширины изображения реального ВО на ФМ w р определяют через параметры ФМ и экрана компьютера, на котором производится обработка изображений эталонной 3D-модели ВО, следующим образом:
. _ ^Рс^Рс^ф:<М _ rprnPCWD _ ^*фн^фм№р
£фзмах ~ 1000 W3 — 1000 wp ~ 1000
где rpc [мкм] – размер пикселя экрана рабочего места компьютера, на котором производится обработка эталонной 3D-модели ВО; r фм [мкм] – размер пикселя фотоприемной матрицы ОЭК;
– количество пикселей в максимальной длине изображения фюзеляжа эталонной 3D-модели ВО на экране рабочего места компьютера; – количество пикселей в ширине изображения эталонной 3D-модели ВО на экране рабочего места компьютера; ?-у ;.. . — количество пикселей в ширине изображения ВО на ФМ.
С учетом (14) выражение (13) примет вид
(J^^f^^eomax^pcw-y ^Р^фэн ^ ФМ ^Ф^р
Применение выражения (15) для определения дальности до ВО сводится к следующим последовательным процедурам: идентификация типа ВО, оконтуривание изображения ВО и определение его характеристик, вызов по первичным ключам данных из соответствующих таблиц базы данных параметров изображений ВО, измерение ширины изображения ВО на ФМ и собственно расчет дальности до ВО. Все эти процедуры четко определены, свободно программируются, требуют мало времени на их реализацию. Применение рассмотренного метода на практике показало, что задача определения дальности до ВО решается в режиме времени от кадра к кадру.
Также следует иметь в виду, что выражение (15) является инвариантным к выбору экрана компьютера, на котором производится обработка эталонных 3D-моделей ВО. Для такой обработки можно выбирать любой подходящий экран рабочего места компьютера. Количество пикселей параметров изображений реального ВО и эталонной 3D-модели ВО определяется путем прямого подсчета в границах прямоугольника, описывающего соответствующие изображения по их крайним точкам.
В заключение следует отметить, что формула (15) позволяет с высокой точностью определять дальность до ВО с учетом его положения в пространстве относительно пассивного однопозиционного ОЭК, находящегося на Земле. Ошибки определения дальности до ВО на основе предложенных методов измерений в ходе натурных испытаний в рамках НИР «Взгляд» составляли десятки метров на дальностях обнаружения ВО до 50 км. Пример сопровождения ВО пассивным однопозиционным ОЭК приведен на рис. 12. Показаны экраны рабочего места оператора пассивного однопозиционного ОЭК: экран захвата и идентификации ВО (справа) и экран сопровождения трассы ВО (слева).

Рис. 12. Вид экранов рабочего места оператора пассивного однопозиционного ОЭК
Fig. 12. Single-position OEC OWS screen images
Список литературы Метод определения дальности воздушного объекта пассивным однопозиционным оптико-электронным комплексом
- Шапиро Л., Стокман Дж. Компьютерное зрение. Пер. с англ. М.: Бином. Лаборатория знаний, 2006. 752 с.
- Вахитов А.Т., Гуревич Л.С., Павленко Д.В. Обзор алгоритмов стереозрения. Стохастическая оптимизация в информатике, 2008, 4(1-1), 151-169
- Котюжанский Л.А. Вычисление карты глубины стереоизображения на графическом процессоре в реальном времени. Фундаментальные иссле-дования, 2012, 6, 444-449
- Быков С.А., Еременко А.В., Гаврилов А.Е., Скакунов В.Н. Адаптация алгоритмов технического зрения для систем управления шагающими машинами. Известия Волгоградского государственного технического университета, 2011, 3(10), 52-56
- Виголов О.В., Желтов С.Ю. Система стереозрения мобильного робота для обнаружения препятствия в режиме реального времени. Механика, управление и информатика, 2011, 6, 202-215
- Локтев Д.А., Алфимцев А.Н. Измерение расстояния до движущегося объекта с помощью комплексной системы видеомониторинга. Инженерный журнал. Наука и инновации, 2013
- Соколов С.М., Богуславский А.А., Васильев А.И., Трифонов О.В., Назаров В.Г., Фролов Р.С. Мобильный комплекс для оперативного создания и обновления навигационных карт. Известия Южного федерального университета, Технические науки, 2011, 116(3), 157-166
- Патент № 2095756 С1 МПК G01C 3/32 (1995.01). Способ определения расстояния до объекта
- Европейский патент №ЕР 0379425, МПК G01С 3/18, G01S 11/12, на изобретение "System for determining the position of at least one target by means of triangulation"
- Стрельцов О.В., Даниленко А.О. Методы определения расстояния до препятствия при движении мобильного робота. Работы Одесского политехнического университета, 2013, 2(41)
- Литвин М.М., Одегов В.В., Елманов С.А. Способ определения расстояния до объекта при помощи оптического прибора. Патент Российской Федерации № 2095756 от 10.11.1997
- Зуев С.В. Патент
- Абрамов Н.С., Фраленко В.П. Определение расстояний на основе системы технического зрения и метода инвариантных моментов. Информационные технологии и вычислительные системы, 2012, 4
- Локтев Д.А. Разработка и исследование методов определения параметров статичных и движущихся объектов в системе мониторинга. Диссертация на соискание ученой степени кандидата технических наук, 2015 г..
- Лазарев Л.П. Оптико-электронные приборы наведения. М.: Машиностроение, 1989, 512 с.
- Стучилин А.И., Чернявский В., Моисеенко П., Золотухин В.К. Способ определения дальности до движущегося воздушного объекта методом пассивной локации. Патент на изобретение № 2603998 от 30.06.2016
- Золотухин В.К., Стучилин А.И. Теоретические основы идентификации типа и государственной принадлежности воздушных судов. Тверь: Издатель А.Н. Кондратьев, 2019, 327 с.
- Стучилин А.И. Применение сверточных нейронных сетей для идентификации типов воздушных объектов в оптико-электронном комплексе. Вестник Военной академии воздушно-космической обороны. Вып. 1. Тверь: ВА ВКО, 2018, с. 48-53
- Стучилин А.И. Экспертно-аналитический метод идентификации типов ВО в ОЭК на основе экспертной базы знаний. Вестник войсковой ПВО, Смоленск: ВА ВПВО ВС РФ, секретно, инв. № 23084, с. 181-185
- Ларичев О.И., Мечитов А.И., Мошкович Е.М., Фуремс Е.М. Выявление экспертных знаний. М.: Наука, 1989, с. 128
- Иванов А.С., Стучилин А.И. Метод определения значений угловых параметров положения воздушного объекта в пространстве на основе анализа его изображения. Вестник войсковой ПВО. Смоленск. ВА ВПВО ВС РФ, секретно, инв. № 23573, 2019, с. 49-56
