Метод определения взаимных координат БПЛА в группе на основе радиодальномерных измерений с ретрансляцией

Автор: Дмитриев Д.Д., Гладышев А.Б., Ратушняк В.Н., Лыхо А.В., Михов Е.Д.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 3 т.19, 2026 года.
Бесплатный доступ
Статья посвящена актуальной проблеме организации высокоточной взаимной навигации в группе (рое) беспилотных летательных аппаратов (БПЛА). В работе дан краткий анализ ключевых подходов к решению этой задачи: централизованного, децентрализованного (роевого) и гибридного. Особое внимание уделено гибридным методам, сочетающим использование ГНСС и ультраширокополосных (UWB) радиотехнических систем. Показаны недостатки этих методов: высокая загрузка каналов связи, сложность синхронизации и объединения локальных систем координат, а также ограниченная дальность действия. В качестве альтернативы предложен радиодальномерный метод с ретрансляцией, позволяющий измерять расстояния между БПЛА‑лидером и остальными БПЛА группы. Подробно описан усовершенствованный метод взаимной навигации, комбинирующий радиодальномерный и ретрансляционный подходы. Представлен пошаговый алгоритм, позволяющий по результатам циклических измерений определить не только расстояния от лидера до каждого БПЛА, но и все взаимные расстояния между членами группы. На основе этих данных выведены формулы для расчета координат всех БПЛА в локальной декартовой системе, связанной с БПЛА‑лидером.
Спутниковая радионавигация, ГЛОНАСС, беспилотные летательные аппараты, группа беспилотных летательных аппаратов, относительные навигационные измерения, взаимная навигация, дальномерный метод измерения дальности, локальная система координат
Короткий адрес: https://sciup.org/146283295
IDR: 146283295 | УДК: 629.7.054.07
Method for Measuring Mutual Coordinates of UAVs in a Group Based on Radio Range Measurements with Relay
This article addresses the pressing issue of organizing high-precision mutual navigation in a swarm of unmanned aerial vehicles (UAVs). It provides a brief analysis of centralized, decentralized (swarm), and hybrid approaches to solving this problem. Particular attention is given to hybrid methods combining GNSS and ultra-wideband (UWB) radio systems. The disadvantages of these methods, including high communication channel load, difficulty synchronizing and merging local coordinate systems, and limited range, are highlighted. As an alternative, a radio ranging method with relay is proposed, allowing for measuring the distances between the leader UAV and the other UAVs in the group. An improved method for mutual navigation, combining radio ranging and relay approaches, is described in detail. A step-by-step algorithm is presented that allows, based on cyclic measurements, to determine not only the distances from the leader to each UAV, but also all mutual distances between group members. Based on this data, formulas are derived for calculating the coordinates of all UAVs in a local Cartesian system associated with the leader UAV.
Текст научной статьи Метод определения взаимных координат БПЛА в группе на основе радиодальномерных измерений с ретрансляцией
Благодарности. Исследование выполнено за счет гранта Российского научного фонда № 25–19– 20070, –19–20070/, гранта Красноярского краевого фонда науки.
Цитирование: Дмитриев Д. Д. Метод определения взаимных координат БПЛА в группе на основе радиодальномерных измерений с ретрансляцией / Д. Д. Дмитриев, А. Б. Гладышев, В. Н. Ратушняк, А. В. Лыхо, Е. Д. Михов // Журн. Сиб. федер. ун-та. Техника и технологии, 2026, 19(3). С. 368–376. EDN: KUTQZC скольких членов группы из-за технических неисправностей или противодействия не приводит к провалу выполнения задачи в целом. Функции перераспределяются между оставшимися БПЛА. В качестве преимущества также можно указать и возможность применения алгоритмов роевого интеллекта для управления группой БПЛА, которые позволяют группе динамически адаптироваться к изменяющейся обстановке, самостоятельно перестраиваясь и меняя цели без прямого вмешательства оператора (например, обход неожиданных препятствий, преследование движущейся цели) [3]. Применение группы БПЛА имеет и существенный экономический эффект. Использование множества сравнительно простых и дешевых БПЛА часто экономически выгоднее, чем создание одного сложного и дорогого аппарата, способного решать аналогичные задачи [4].
-
1. Методы навигации БПЛА в составе группы
Навигация БПЛА внутри группы – это краеугольный камень всей технологии группового применения, требующий решения задач взаимного позиционирования, избегания столкновений и совместного движения к цели на всех этапах функционирования группы [5, 6]. Точная информация о взаимном местоположении БПЛА внутри группы является необходимым условием для поддержания положения в строю и исключения летных происшествий [7]. Существует несколько основных подходов и их комбинаций к организации навигации БПЛА внутри группы [8]:
-
– централизованный – все БПЛА получают команды напрямую от центральной станции управления, которая формирует траектории движения для исключения столкновений, передавая при этом по линиям связи сигналы управления для каждого из участников группы. В качестве основных недостатков следует отметить, что этот подход предполагает значительную вычислительную нагрузку на центральную станцию управления и, кроме того, передачу больших объемов информации;
-
– децентрализованный на основе взаимного обмена данными (роевой подход) – каждый БПЛА является независимым агентом, который автономно определяет свои навигационные параметры – абсолютные координаты и положение внутри группы на основании данных, полученных от других членов группы по каналам связи. На основе собственных алгоритмов роевого интеллекта каждый из членов группы самостоятельно принимает решение о своем движении в составе группы, поддерживая минимальные (или заданные полетным заданием) расстояния от соседних БПЛА;
-
– гибридный (смешанный) – решения об общем планировании маршрутов, выполняемых группой, принимаются БПЛА-лидером на основе навигационной информации от подчиненных БПЛА. В данном случае БПЛА-лидер использует бортовую навигационную систему на основе ГНСС-приемников, инерциальных и оптико-электронных навигационных систем для определения абсолютных координат, а члены группы ориентируются относительно него, используя бортовые сенсоры (оптические, лидары, радиотехнические).
-
2. Метод определения взаимных координат БПЛА в группе
Учитывая достаточно жесткие требования к бортовым навигационным средствам БПЛА по массе, габаритам и энергопотреблению, для навигации БПЛА внутри группы наибольшее применение нашли гибридные подходы, основанные на децентрализованной навигации с использованием ГНСС-приемников и ультраширокополосных радиотехнических навигационных систем (UWB – Ultra-WideBand) на основе UWB-модулей [9]. UWB-технология стала фактическим стандартом для высокоточного относительного позиционирования в роях БПЛА благодаря – 370 – своей устойчивости к помехам, высокой точности (до 10 см) и низкому энергопотреблению. В подобной системе каждый БПЛА оснащен автономным UWB-модулем, способным напрямую измерять расстояние до любого другого модуля в пределах прямой видимости. Все модули равноправны и обмениваются двусторонними сообщениями по протоколу Two-Way Ranging (TWR) или его улучшенных версий Double-Sided TWR (DS-TWR) и Symmetrical Double-Sided TWR (SDS-TWR) [10, 11]. Каждый БПЛА, получив набор расстояний до соседних БПЛА группы, самостоятельно вычисляет свое относительное положение в собственной локальной системе координат. Основным недостатком данного подхода являются сложные распределенные алгоритмы для совмещения локальных систем координат каждого БПЛА с общей системой координат группы.
Более простая реализация приведенного выше алгоритма возможна при иерархическом построении группы. В данном случае назначается БПЛА-лидер с опорным UWB-модулем, до которого производится измерение расстояний другими членами группы. При этом необходимо осуществлять измерение расстояний до нескольких лидеров (4 и более) с помощью методов TWR или Time Difference of Arrival (TDoA) для реализации алгоритмов трилатерации [12]. В качестве недостатка следует отметить необходимость высокоточной навигации БПЛА-лиде-ров, организации обмена данными между ними, а также синхронизацию бортовых шкал времени отдельных БПЛА при использовании протокола TDoA.
Приведенные выше методы обладают некоторыми существенными недостатками – большая загрузка каналов связи при большом количестве БПЛА в группе, высокие требования к вычислительным ресурсам для совмещения локальных систем координат отдельных БПЛА в единую систему координат группы. Кроме того, UWB-модули обладают сравнительно невысоким энергетическим потенциалом, что резко ограничивает их дальность действия.
Если имеется возможность ограничиться измерением расстояний между отдельными БПЛА и БПЛА-лидером, то можно предложить другой метод, для реализации которого достаточно оснастить БПЛА группы ретрансляторами, а БПЛА-лидер будет выступать в роли опорного [13]. Суть метода заключается в организации локальной радионавигационной системы, при этом в качестве опорного БПЛА будет использоваться БПЛА-лидер, измерения дальностей до всех БПЛА будут производиться относительно него. Рассмотрим более подробно организацию такой системы. БПЛА-лидер формирует и излучает навигационный широкополосный сигнал, модулированный дальномерным кодом на основе М-последовательности или ее разновидностей (коды Голда, Касами и т.п.). Ретрансляторы, размещенные на БПЛА, принимают данный сигнал, переносят в полосу частот, выделенную для каждого ретранслятора, и излучают в направлении БПЛА-лидера (рис. 1).
В отличие от протокола TDoA, в данном методе отдельные БПЛА группы не фиксируют время приема радионавигационного сигнала, а измерение расстояний d i до каждого БПЛА производится на БПЛА-лидере по формуле (1).
^i ^ delay ’ (1)
где t i – время задержки от момента излучения дальномерного сигнала до момента приема ретранслированного; с – скорость света; t delay – время задержки дальномерного сигнала в ретрансляторе.
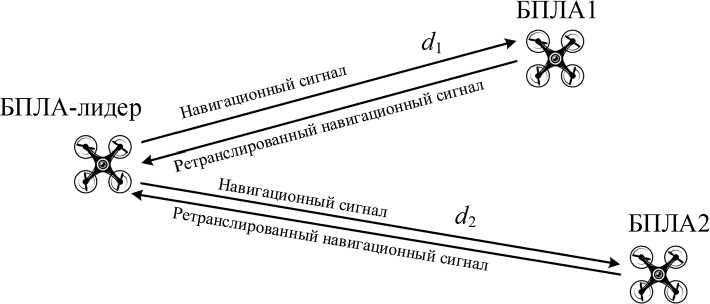
Рис. 1. Метод измерения расстояний между БПЛА-лидером и БПЛА группы с использованием ретрансляции
Fig. 1. Method of measuring the distance between the leader UAV and the group UAV using relay
Значения частот дальномерного сигнала, излучаемого БПЛА-лидером, можно выбирать как в рабочем диапазоне частот ГНСС, так и в каком-либо другом рабочем диапазоне. Для исключения взаимного влияния сигналов ГНСС и дальномерного сигнала частота дальномерного сигнала формируется в полосе частот, свободных от стандартных спутниковых радионавигационных сигналов стандартной точности [14]. Приняв ширину полосы частот дальномерного сигнала БПЛА-лидера, равную 5 МГц – 1593…1598 или 1605…1610 МГц, получим достижимую погрешность измерения дальности, сопоставимую с погрешностью измерения координат ГНСС-приемниками по сигналам высокой точности. Кроме того, в предлагаемой структуре в качестве дальномерного сигнала можно использовать сигналы и с кодовым разделением, то есть CDMA-сигналы (Code Division Multiple Access – множественный доступ с кодовым разделением). При этом если модулирующая функция дальномерного кода сигналов БПЛА-лидера отличается от применяемой при модуляции сигналов спутниковых навигационных систем, то можно выбирать любую частоту излучения сигналов в пределах разрешенного диапазона частот.
Достоинством предложенного метода является его простота реализации – БПЛА группы оснащаются только ретрансляторами, вся обработка сигналов производится только на БПЛА-лиде-ре, не требуется синхронизация бортовых шкал времени и пересчет локальных систем координат отдельных БПЛА в единую. Его основным недостатком является возможность измерения расстояния только между БПЛА-лидером и отдельными БПЛА группы, что практически полностью обесценивает достоинства группового применения за исключением редких ситуаций.
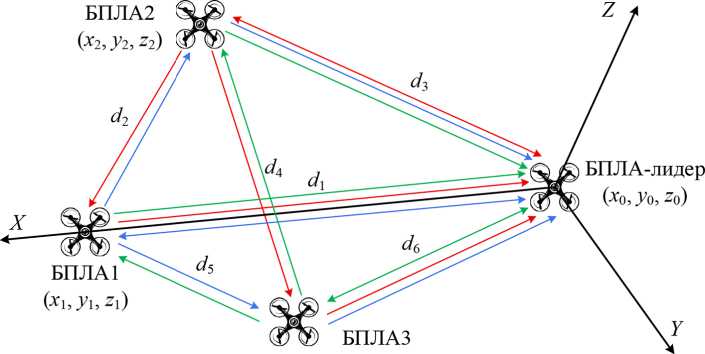
В качестве альтернативы можно предложить метод взаимной навигации БПЛА в группе, совмещающий использование запросных методов (TWR) и ретрансляции (рис. 2).
Подробно рассмотрим предложенный алгоритм определения координат отдельных БПЛА в группе. Измерение расстояний от БПЛА-лидера до всех членов группы производится в несколько этапов, при этом один из БПЛА группы выступает в роли ответчика, остальные – ретрансляторов. При расчетах примем, что задержки, возникающие в ответчиках и ретрансляторах БПЛА, могут быть откалиброваны с высокой точностью и учтены при измерении времени задержки на БПЛА-лидере.
fey,, s,)
Рис. 2. Метод определения взаимных координат БПЛА в группе на основе радиодальномерных измерений с ретрансляцией
Fig. 2. Method for determining the mutual coordinates of UAVs in a group based on radio range measurements with relay
На первом этапе БПЛА-лидер формирует и излучает запросный навигационный сигнал для БПЛА1, выступающий ответчиком (синие стрелки на рис. 2). Он принимает этот сигнал, формирует ответный сигнал и излучает его. БПЛА2 и БПЛА 3, выступая в роли ретрансляторов, принимают этот ответный сигнал и ретранслируют его в направлении БПЛА-лидера. Для однозначного определения пути прохождения навигационных сигналов БПЛА-ретрансляторы добавляют в ответный сигнал идентификационную информацию. Таким образом, БПЛА-ли-дер принимает три ответных сигнала, по времени задержки которых по (1) относительно времени излучения запросного сигнала определяется три расстояния:
d 1 – расстояние между БПЛА-лидером и БПЛА1;
r 1,2 = d 2 + d 3 – расстояние между БПЛА-лидером и БПЛА1 через БПЛА2;
r 1,3 = d 5 + d 6 – расстояние между БПЛА-лидером и БПЛА1 через БПЛА3.
На втором этапе БПЛА-лидер формирует и излучает запросный навигационный сигнал для БПЛА2, выступающего ответчиком (красные стрелки на рис. 2), а БПЛА1 и БПЛА3 в этом случае будут выступать ретрансляторами. По завершении этапа БПЛА-лидер также определяет три расстояния:
d 3 – расстояние между БПЛА-лидером и БПЛА2;
r 2,1 = d 2 + d 1 – расстояние между БПЛА-лидером и БПЛА2 через БПЛА1;
r 2,3 = d 4 + d 6 – расстояние между БПЛА-лидером и БПЛА2 через БПЛА3.
Используя результаты измерения первого и второго этапов, определяется расстояние между БПЛА1 и БПЛА2 d 2 как разность между r 2,1 и ранее измеренным d 1 .
В ходе третьего этапа производится измерение расстояния между БПЛА-лидером и БПЛА3 d 6 (зеленые стрелки на рис. 2) и вычисление расстояний между БПЛА1 и БПЛА3 d 5 и между БПЛА2 и БПЛА3 d 4 с использованием результатов предыдущих этапов.
Расчет координат всех БПЛА в группе производится на борту БПЛА-лидера в локальной системе координат, центр которой находится в центре масс БПЛА-лидера, ось абсцисс про-– 373 – ходит через центр масс одного из БПЛА группы (на рис. 2 – через центр масс БПЛА1), а центр масс БПЛА3 находится в положительном квадранте плоскости X0Y. Определим координаты всех БПЛА группы в выбранной системе координат. Исходя из условий, координаты БПЛА-ли-дера равны (0, 0, 0), БПЛА1 – (d1, 0, 0).
Учитывая, что центр масс БПЛА3 находится в плоскости X 0 Y , его координата z = 0. Рассчитаем координаты x 3 , y 3 , используя известные соотношения для длин векторов d 2 = ( x – x i )2 + ( y – y i )2 + ( z – z i )2, где x , y , z – координаты начальной точки, x i , y i , z i – координаты конечной точки. Из известных расстояний d 5 и d 6 имеем:
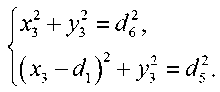
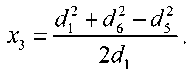
Вычитая первое уравнение из второго, получим x^ — 2x^d^ +t/j + у— (x3 + ja j — d$ — d . Упростив и выразив x 3 , получим:
Откуда
Произведем расчет координат БПЛА2. Из известных расстояний d 2 и d 3 имеем:
Решая (5) относительно x 2, получим:
Используя известное расстояние между БПЛА2 и БПЛА3 d 4 , получим систему уравнений:
Xl + У 2 + “2 = A ’
/*2 - *3 Г + (Л - Уз )2 + - J = A •
Раскрыв второе уравнение системы (7) (Л Л ) ^^2 ^УзУз^Уз +-2 d в него У 2 "^ ^2 — ^3 — ^2 , получим:
и подставив
Уз ~ _ (8)
^^^з~А-у\ • (9)
Таким образом, получены аналитические выражения для вычисления координат всех БПЛА в группе. Достоинством данного метода является возможность строгого решения – в отличие от общепринятых способов решения навигационных задач, нет необходимости применять итерационные методы наименьших квадратов для решения систем уравнений.
Заключение
Таким образом, актуальность применения групп (роев) БПЛА определяется их способностью совершать качественный скачок в продуктивности, живучести и функциональности. Они трансформируют подходы к решению задач в военной и гражданской сферах, предлагая экономически эффективные, масштабируемые и устойчивые решения. Роевые технологии для БПЛА перешли из разряда экспериментальных в разряд стратегически важных, определяющих облик современных и будущих операций, что делает инвестиции в развитие этой области критически важными для государств и корпораций.
Одной из наиболее сложных задач, сдерживающих активное применение БПЛА в составе групп, является их взаимная навигация. Наиболее перспективным следует признать децентрализованный (роевой, на основе взаимообмена данными) и гибридный (с использованием БП-ЛА-лидера) подходы для организации навигации внутри группы. Децентрализованный подход потенциально обеспечивает наилучшую точность позиционирования и гибкость формирования роя, однако он предъявляет наиболее жесткие требования к вычислительным возможностям бортовых систем управления и каналам обмена данными, обусловленные требованиями совмещения локальных систем координат каждого БПЛА в единую систему координат группы и достаточно плотным трафиком обмена данными между БПЛА по принципу «каждый с каждым».
В качестве компромисса можно рассмотреть гибридные методы, сочетающие использование ГНСС и локальные радиотехнические системы навигации. Если имеется возможность ограничиться измерением расстояний между отдельными БПЛА и БПЛА-лидером, то можно применить метод, основанный на радиодальномерном принципе с ретрансляцией. Применение усовершенствованного метода, совмещающего использование запросных методов и метода ретрансляции навигационных сигналов, позволяет за несколько измерений при помощи навигационного сигнала, излучаемого с БПЛА-лидера, определить расстояния между всеми БПЛА группы. Определение координат в данном случае производится в единой локальной системе координат с использованием строгих аналитических выражений, что резко снижает требования к вычислительным возможностям. Достоинствами предложенного подхода являются простота реализации (ретрансляторы на БПЛА можно реализовать на основе программно-определяемого радио, что проще и дешевле полноценных UWB-модулей), отсутствие необходимости в сложной синхронизации и в объединении локальных систем координат, а также снижение общей нагрузки на каналы связи. Основным недостатком можно признать централизованный характер системы, где отказ БПЛА-лидера может привести к потере навигации всей группой, что противоречит одному из базовых принципов роя – отсутствию единой точки отказа.
