Метод освобождения динамической расчетной модели летательного аппарата

Автор: Красноруцкий Дмитрий Александрович, Бернс Владимир Андреевич, Лакиза Павел Анатольевич, Левин Владимир Евгеньевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.21, 2019 года.
Бесплатный доступ
Расчетные динамические модели разрабатываются на этапе проектирования летательного аппарата (ЛА) и используются в оценках эксплуатационной нагруженности, обеспечении прочности, управляемости и аэроупругой устойчивости ЛА. Эти модели сопровождают экспериментальные исследования, опытную и серийную эксплуатацию ЛА. При этом расчетные модели корректируются по результатам наземных модальных испытаний. Расчетной моделью ЛА является, как правило, модель свободной динамической системы. В то же время для модальных испытаний авиационная техника либо устанавливается на шасси, либо помещается на специальную систему упругого вывешивания, а космические конструкции - на систему обезвешивания. В настоящей работе предлагается метод освобождения закрепленной динамической расчетной модели ЛА после проведения процедуры прямой коррекции её матриц жесткости и/или масс. Такая коррекция приводит к тому, что сделать модель свободной невозможно непосредственным возвращением убранных при закреплении модели степеней свободы. Предлагаемый метод позволяет освободить модель от закреплений при условии, что известны инерционные характеристики свободной конструкции. А именно: масса и массовые моменты инерции относительно некоторой точки, например, центра тяжести. Метод основан на том, что закрепленная модель ставится на виртуальную подвижную платформу, которая имеет инерционные характеристики исходной свободной конструкции. Это позволяет описывать в модели движение конструкции как жесткого тела. Движение платформы влияет через инерционные силы на закрепленную модель, обратное влияние осуществляется через сумму всех сил инерции модели, которая, по сути, является реакцией в закреплении. Система уравнений движения закрепленной модели дополнена уравнениями движения платформы, силы инерции, обусловленные движением как жесткого целого, добавлены в каждое уравнение движения модели. Кроме того, осуществлен переход от локальной системы координат, связанной с закрепленной моделью, к глобальной системе координат. Полученные уравнения не нарушают симметрию матриц жесткости и масс. Частоты и формы собственных колебаний освобожденной модели близки к соответствующим частотам и формам свободной модели. Реализация метода проиллюстрирована для математической модели набора линейных осцилляторов. Показан пример освобождения условной балочной модели самолета, установленного на шасси.
Летательный аппарат, расчетная динамическая модель, модальные испытания, коррекция расчетной модели, освобождение расчетной модели
Короткий адрес: https://sciup.org/148314141
IDR: 148314141 | УДК: 539.3
Method of freeing a fixed dynamic model of an aircraft
Calculated dynamic models are developed at the design stage of an aircraft and are used to estimate operational loading, to provide strength, controllability and aeroelastic stability of the aircraft. These models accompany experimental investigations, trial and serial operation of the aircraft. Wherein the calculated dynamic models are updated by the results of ground modal tests. The calculated model of the aircraft is as a rule the model of the free dynamic system. While the aircraft vehicles are set on landing gears or are installed on the special system of elastic hanging to perform the modal tests, and the space structures are set on the offloading (zero-G) system. In the present work the method of freeing a fixed dynamic model of an aircraft after the procedure of direct updating its stiffness and/or mass matrices has been proposed. This model updating leads to the fact that it is impossible to free the model by direct returning of the degrees of freedom which were removed during the process of fixing the model. The proposed method allows to free the model from fixations in the case of the inertia characteristics of the free structure are known. As in, mass and moments of inertia regarding some point, for example, center of mass. The method is based on the fact that the fixed model is set on a virtual mobile platform which has the inertia characteristics of the input free structure. It allows to describe the movement of the structure as a rigid body in the model. Movement of the platform influences on the fixed model through inertial forces. Reverse impact is performed through the sum of all the inertial forces which is the reaction in the fixation basically. The system of equations which describes movements of the fixed model was extended by the equations of movements of the platform. The inertial forces which are conditioned by the movement as a rigid body are added to each equation of motion of the model. Moreover, transition from the local coordinate system, which is linked to the fixed model, to the global coordinate system is executed. The obtained equations do not violate the symmetry of the stiffness and mass matrices. The eigenfrequencies and eigenforms are close to the corresponding frequencies and forms of the free model. The implementation of the method has been shown on the mathematical model of linear oscillators. The example of freeing of the conditional beam model of the aircraft, which is set on the landing gears, is presented.
Текст научной статьи Метод освобождения динамической расчетной модели летательного аппарата
Расчетные динамические модели разрабатываются на этапе проектирования летательного аппарата (ЛА). Они используются в оценках
эксплуатационной нагруженности, обеспечении прочности, управляемости и аэроупругой устойчивости ЛА. По завершению расчетного этапа изготавливается динамически подобная модель (ДПМ) ЛА и проблема аэроупругой устойчивости решается экспериментально [1, 2]. Затем сроится опытное изделие, а за ним и серийные. Расчетные динамические модели сопровождают экспериментальные исследования, опытную и серийную эксплуатацию ЛА. При этом расчетные модели корректируются по результатам наземных модальных испытаний, которым подвергаются ДПМ, опытные и выборочно серийные ЛА [1 – 10].
Важно отметить, что расчетной моделью ЛА является модель свободной динамической системы. В то же время для модальных испытаний авиационная техника либо устанавливается на шасси, либо помещается на специальную систему упругого вывешивания, а космические конструкции - на систему обезвешивания. Системы упругого вывешивания и обезвешивания, влияние которых на свободную конструкцию строго регламентировано [11], являются сложными и дорогостоящими техническими сооружениями. Кроме того, известные методы коррекции математических моделей конструкций не предполагают использование моделей для граничных условий, отличных от тех, что были реализованы в эксперименте [12 - 19]. В настоящей работе предлагается метод освобождения динамической расчетной модели ЛА после проведения процедуры ее коррекции.
МЕТОД ОСВОБОЖДЕНИЯ РАСЧЕТНОЙ МОДЕЛИ
Пусть имеется скорректированная по результатам испытаний закрепленная конечноэлементная (КЭ) модель L некоторой упругомассовой конструкции. Модель описывается матрицами жесткости K и масс M , имеет n степеней свободы и N узлов. Система уравнений собственных колебаний этой модели имеет следующий вид:
KX + MX = 0 . (1)
Ставится задача освободить КЭ-модель от закреплений при условии, что известны инерционные характеристики свободной конструкции, а именно: масса и массовые моменты инерции относительно некоторой точки, например, центра тяжести. Информации об убранных при начальном закреплении модели степенях свободы либо нет, либо она неактуальна, то есть она не позволяет сделать модель свободной. Последнее имеет место быть, например, когда проводится прямая коррекция матрицы жесткости и/или масс закрепленной модели по результатам эксперимента.
Пусть рассматриваемая модель L находится на виртуальной платформе, к которой она прикреплена всеми узлами, которые были зафиксированы. Эта платформа может перемещаться и поворачиваться как жесткое целое. Положение платформы в глобальной неподвижной системе координат будем определять координатами точки C - вектором R 0 = ( x 0 , y 0 , z 0 ) , а ориентация в пространстве задается вектором конечного поворота Q = ( ® , ® 2 , ® 3 ) [20]. Виртуальная платформа в общем случае находится на упругом основании, заданном тремя линейными и тремя крутильными жесткостями.
При ускорении платформы на закрепленную модель действуют дополнительные силы инерции, обусловленные ускорением каждой точки за счёт перемещения и поворота платформы, поэтому уравнение движения (1) перепишется в следующем виде:
X + X 0 ) = 0 . (2)
|
—* R , |
x 0 |
( x 0 , y 0 ,. |
., ® 3 ) |
|||
|
где X 0 = - |
... — R n |
f = - |
... x 0 |
( x 0 , y 0 ,- |
., ® 3 ) |
■ , i*i = i* 0 + — |
x 0 , y 0 , z 0 - линейные перемещения платформы, ®х 2® 2 , ® 3 - компоненты вектора конечного поворота Q . В случае малых поворотов матрица X линейна относительно компонент этого вектора и имеет следующий вид:
X ( ® , ® 2, ® 3 ) =
^ 1 ® 3 — ® 2 '
— ® 3 1 ® 1
v ® 2 — ® 1 v
Каждый узел КЭ-модели L до деформирования имеет координаты x 0 , y 0 , z ” , i = 1.. N в своей системе координат, которая необязательно совпадает с системой координат, выбранной выше, тогда точка C в этой системе имеет координаты x 0 , У 0 , z о . Так как рассматриваются малые перемещения, то зависимость — = — ( ® ,, ® 2, ® 3 ) - линейная относительно компонент вектора конечного поворота [20]:
— = Xr 0
1 ® 3
—®3 1
' 1 ® 3 — ® 2)
— ® 3 1 ® 1 I
I ® 2 -® 1 1 J

A x0 — A z 0 ® 2 + A y 0 ® 3 - A z0 ® + A y 0 — A x° ® 3
—A y 0 ® 1 + A x 0 ® 2 + A z 0
— ® 2 ^ ® 1 I-
1 л

, i = 1.. N .
Для определенности пусть каждый узел описывается тремя линейными и тремя угловыми степенями свободы (хотя в общем случае это может быть не так), тогда выражение (2) с учетом (3) перепишется в следующем виде:
x 1 x 2
x 3
x 4 x 5
K - x 6
K -
+ M
...
...
...
...
...
xn
x 4
Х 5 x 6
...
...
...
...
...
■ • xn
-
• • A 0 1 1 A 0 11 x 0 — A z 1 ® 2 + A y ® 3 y 0 + A z 0 ® — A x 0 ®3 z 0 — A y1° ® 1 + A x 0)2
-
■ •
® 1
-
■ •
-
■ •
...
z 0 — A y N ® 1 + A x N ® 2
■ •
Раскрывая скобки в (4), получим:
x 1 x 2
x 3 x 4
x 5 x
u m -
...
...
...
...
...
x n
-
■ ■
x1 ■ ■ x 2
xз x4
-
■ ■
x 5
-
■ ■
x 6
...
...
...
...
...
-
■ ■
xn J
u m -
[ 1 0 0 0 0
, 0
0 0
...
.
= 0 (4)
■ x 0 + m -
' 0 2
J 0
| 0
... 0
.
f y 0 + M -
0 2
J 0
- 0
0 1
...
■ ■ z0
+ M <
|
0 |
A z 0 |
'-A y 0 |
||
|
-Az 0 |
0 |
A x 0 |
||
|
A У 0 |
-A x 0 |
0 |
||
|
1 |
0 |
0 |
||
|
0 |
1 |
0 |
||
|
0 |
■ № i + M . |
0 |
(i)7 + M- |
1 |
|
0 |
A z 0 |
2 |
-A y 0 |
|
|
-Az 0 |
0 |
A x 0 |
||
|
A У 0 |
-A x 0 |
0 |
||
|
1 |
0 |
0 |
||
|
... 0 |
... [0 |
... [0 |
> (£> 3 = 0 .
ее
ˆ
Перепишем уравнение (5) в матричном виде:
ˆ
KX + MX = 0,
где X = { X i ,x 2
.
.
.,
xn x 0 y 0
.
.
.
®3 }r, K - матрица жесткости K, дополненная шестью нулевыми столб-
цами, чтобы соответствовать X , а матрицу M можно определить следующим образом:
ˆ
M =
N
m 11.
.. m 1 n
Z m i, G ji
N
Z m i, GK2
N
Z m i, G j ,3
N
m 1 G j
+
N
N
j = i
N
m 21.
-m 2 n Z m 2, G„ Z m 2, j Z
j = i
m 2, G j ,3
.
..
.
..
..
.
.
.
.
.
.
.
.
.
.
N
N
N
m n 1.
-m nn Z m nG j , Z m j Z
j = i
m n , G j ,3
V
, Z +A yjOm i. G j ,3
j = i
N
N
m
1 Gj 5
+
А
-A z 0 m. r j 1, Gj ,
m 2 G j
+
, Z +A y ° m 2 G j ,3
j = i
N
s
-Az0m. r j 2,Gj
.
..
m n G j
+
,
Z +A y >^ь.
j = i
-Az0 m r j n,Gj
s
,
Z +A z 0 m i, G ji
j = i
N
N
m 1, Gj ,6
+
-Ax0 m. r j 1,Gj,3
m 2, G j
+
, Z +A z 0 m 2, G ji
j = i
N
s
V
-Ax0m. r j 2,Gj,3
.
..
m n , G ,5
+
, Z +A z 0 m n , G j ,i
j = i
V
-A x 0 m n , G j ,3
, Z +A x 0 m i, G j ,2
j = i
N
-A yj°m i. G ji
m 2, G j ,6
+
, Z +A x 0 m 2,G j2
j = i
А
s
s
N
V
-A y ° m 2,G ji
.
..
m n , G ,6
+
А
,
, Z +A x 0 m n , Gb2
j = i
V
y j n , Gj ,1
s
где матрица (таблица) Gj i – содержит порядковый номер уравнения, соответствующего i-ой степе-
ни свободы j -го узла.
Составим уравнения движения платформы. Пусть c1,2,3
, K i,2,3
– линейные и угловые жесткости
крепления платформы. Если платформа свободна, эти жесткости равны нулю. Пусть m0 – общая масса
платформы и конечно-элементной модели L (масса свободной конструкции), а J1 2 3
щие массовые моменты инерции. Тогда можно записать 6 уравнений движения платформы:
– соответствую-
ее
к-% + Ц-^ + S m • X = 0 ,
где
S m =
x 0
y 0
^ = <
z
№
№ 2
V® 3
,
< ci 0 0 0
0 c 2 00
о А
к =
Z mG])i
N
m
+
00 c 3 0
m 0 00
о А
0 0 0 k i 0
0 0 0 0 к
0 0 0 0 0 к 3
N
,
A =
j 1
2 2
0 m 0 0
.
.
.
.
.
.
m
0 J 1
,
00 J
000 J 3
Z m
j 1
n
N
Z m
G j ,2 , n
j = i
.
.
.
Z mG j3
n
J 1
Z + m
A y 0
- m.
m
Z + m
- m,
A x
m
+
Z + m
,i A x j 0
- m.
, i A у
mG j 4 2
J 1
Z + m
j 3
+
, 2 A У 0
- mr
G j ,2 ,2
m
j 5
Z + m
А
.
.
.
V 7.
- mr
Gj
m
, 2 A xi
,6 ,2
+
Z + mG,
- m,
, A x
'j
, 2 A У,
m
G j 4 n
J 1
Z + m<
.
.
.
.
.
N
+
G j 3 n
A y j
- mr „
G j ,2 , n
m
Z + m
j = i
N
n
n
- m.
n
A x1
.
m
G j 6 n
+
А
+ mc „
L^ Gj o- n
.
j = i
- m.
A x1
n
A У 0
Уравнения (6) и (7) образуют новую систему уравнений движения с симметричными матрицами размером ( n +6):
KX + MX = 0,
I K - ( S k ) T ( 0 к

I m 0 1J X
+ (s m ( ц - SS m ) J [ 5
= 0 .(10)
или

Для приведения системы (10) к симметричному виду, воспользуемся линейными комбинациями первых n строк (10) в соответствии с таблицей G : j , i
Система (8) описывает собственные колебания конечно-элементной модели L вместе с платформой. Если модель L получена путем закрепления свободной модели L , жесткости крепления платформы равны нулю, тогда частоты, найденные из решения проблемы (8), будут бл и зки к частотам колебаний свободной модели L . При этом формы собственных колебаний, найденные из (8), также будут близки к формам свободной модели, если их привести к одной системе координат с учетом относитель-
2 Г кх - ( s k ) T 5 + MX 1 = 0, G ^ J
S k • X - SS k • 5 + S m • X = 0,
тогда с учетом (10) получим итоговую систему уравнений:
I K -(Sk)T UX+ IM 0 1Jc 1 (-Sk(к + SSk)J{5 } ( 0 (Ц -SSm)J[5'j
= 0. (11)
Получим выражение для SS m аналогично (5):
ного движения.
Переведем (8) в глобальную систему координат. Согласно (3) можно записать следующее:
X X X 0
.5 / = {5 О ),
x 1 x 2 x 3 x 4 x 5
x 6
...
1 x n - 3 x n - 2 x n - 1 x n x 0
y 0
...
Ю 3
x 1 x 2 x 3 x 4 x 5 x 6
...
И x n - 3 x n - 2 x n - 1 x n x о y 0 ...
№
x 0 - A z 0 Ю 2 +A y ^ y 0 + A z °tox - Ax" ю . z 0 - A y ° Ю 1 + A x" ю , to i ® 2
Ю 3
...
z 0 ® 1
® 2
Ю 3 0 0
-A y N to i + A x N ® 2
...
Выразим локальные координаты X :

Подставим (9) в (8):

(к 0^ / х 0! J M ( s m ) 1 J X I / X 0! I
( 0 К Щ 5 / { 0 } J (s m ц J|_U J { 0 /
.
= 0,
так как ( S m ) T • 5 = M • X 0 , ( S k ) T • 5 = K • X 0, тогда I к -(s k) T 1 Cx\Jm 0\ J X I I 0 1 n
.
( 0 К J 5 j \S т Ц 5 (S m • X 0 J
Введем обозначение: S m • X0 = SS m • 5 , тогда последняя система уравнений перепишется следующим образом:
A
z
0(
i>
2
+A
y
°
J = a a x0
1 ...
a a
S m • X 0 =
...
■ a
CDз v 11 ...u, n
.........
761 ■■■ u 6 n J
|
I |
1 |
0 |
J 0 |
' 0 |
'A z 0 |
-A y 0 |
1 |
||||||
|
0 |
1 |
0 |
-A z ° |
0 . |
A x !0 |
||||||||
|
0 |
0 |
1 |
A y f |
-A x j* |
0 |
||||||||
|
0 |
0 |
0 |
1 |
0 |
0 |
||||||||
|
0 |
0 |
0 |
0 |
1 |
0 |
||||||||
|
0 |
■ ■ |
0 |
• • |
0 |
• • |
0 |
• • |
0 |
• • |
1 |
• • |
||
|
= S m |
■ x 0 +1 |
0 |
■ y 0 +1 |
0 |
' z0 +1 |
0 |
■ 0) t +1 |
A z 2 0 |
■ 0) 2 +1 |
-A y 2 |
■ (0 3 |
||
|
0 |
1 |
0 |
-A z 2 0 |
0 . |
A x 21 |
||||||||
|
0 0 |
0 0 |
1 0 |
A y 20 1 |
-A x 20 0 |
2 0 0 |
||||||||
|
( |
... 0 |
... 0 |
... 0 |
... [ 0 |
... [ 0 |
... [ 0 |
J |
Итак:
|
N |
N |
NN |
I Uc + 1 1 G i |
N |
I U 1 |
+ G i |
N |
I u |
c + 0 G i |
||
|
У uc 1, G |
2 u , G^ |
2 U L G „ 2 |
+ U L G i , A y 0 - |
2 |
+ U G |
A z 0 - i 1 i |
2 |
+ u 1 G |
A x 0 - 2 i |
||
|
, i = 1 N |
, i = 1 N |
= 1 i = 1 NN |
( - U L G i ,A z 0 J I Uc + 2 G |
i = 1 N |
- U c ( 1 - G I U 2 |
A x 0 3 i c + G |
i = 1 N |
u u 2 |
A y 0 1 Zi J г + G |
||
|
SS m = |
2 U 2- G 1 i = 1 |
2 U2G,] i = 1 |
2 u2. , 2 = 1 i = 1 |
+ u c A y 0 - 2 G i 3 i - U c A z 0 2- G i ,2 i |
2 |
+ U 2- G ( - U 2- G |
A z 0 - i 1 i A x 0 ■ 3 i |
2 i = 1 |
+ U 2 G U 2 G |
A x 0 - i 2 i 1 A y 0 |
N

+ U c A y 0 - У + U r A z 0 6- G i ,з 1 6-G i 1
-uG A z 0 i = ' -a,G A x 0
6- G i ,2 1 J ( 6- G i ,3 1
JJ
Аналогично можно получить выражения для SS k .
Необходимо отметить, что точка C не обязательно должна располагаться в центре масс, она может находиться в любом месте конструкции. Пусть точка C находится на расстоянии A X , A Y , A Z от центра тяжести, тогда матрица ц может быть вычислена следующим образом:
|
I 1 |
0 |
0 |
0 |
A Z |
A Y 1 |
||
|
0 |
1 |
0 |
-A Z |
0 |
-A X |
||
|
0 |
0 |
1 |
A Y |
-A X |
0 |
||
|
0 |
-A Z |
A Y |
J l+( a 2 -a x |
) -A X A Y |
-A x A z |
||
|
Ц = m 0 |
m 0 |
||||||
|
A z |
0 |
-A X |
-Ay Ay XY |
J ^+ ( A 2 -a Y |
) |
-A y A z |
|
|
m 0 |
J 3 |
||||||
|
A Y |
-A X |
0 |
-A x A г |
-A y A z |
+ ( A 2 -a z ) |
||
|
( |
m 0 |
J |
|||||
где А 2 = A X + А 2 + A Z .
Положение точки C влияет на относительные координаты каждого узла А х 0 , A y 0, A z 0 и матрицы к и ц . Более того, модель может быть закреплена не в одной точке, но нужно иметь в виду, что после процедуры освобождения по (8) или (11) появляется специфическая
f k + k 2 — k 2 — k ,
— k 2 k 2 0
v — k , 0 k 0 + k , ,
z*z
x
- x 2
. x 0
2 +
f m , 0
0 m 2
v 0 0 m 0
— m ,
—
m 2 J
• •
~ x 1
~ x2 « « x0
= 0 .(14)
Система уравнений, описывающих собственные колебаний «Эквивалентной системы»
(рис.1), имеет вид:
погрешность, вызванная тем, что мы заменяем множество закрепленных степеней свободы всего 6-тью степенями свободы вектора ^ , что вносит определенные изменения в деформиро-
вание модели, а именно: все закрепленные точки относительно друг друга не деформируются. Другими словами потерянная информация о законах деформирования закрепленных точек не может быть восстановлена, поэтому освобожденная модель будет отличаться от исходной свободной модели.
Уравнения (8) и (11) могут быть использованы в преобразовании любых расчетных моделей, представленных в виде (1). Проиллюстрируем их применение на простейшем примере: колебания двух масс на пружинках (рис. 1).
Система уравнений собственных колебаний «Закрепленной системы» (рис.1) имеет следующий вид:
k , + k 2 — k 2
— k 2 k 2


m 1 0 0 m 2
• ■ x1
• ■ x2
= 0 . (12)
Преобразование (12) с учетом (8) приводит к следующей системе уравнений:
f k , + k 2 — k 2 0 '
x
— k 2
I 0
k 2 0 - x:
0 k о J
x
f m i 0 m i )
■■ 0 m 2 m 2
I m i m 2 m 0 J
' о,
■ ■ xi
- x 2 ■ ■
I x 0 J
2 = 0 . (13)
Аналогичное преобразование, но с уче-
том (11), даёт такую
систему уравнений:
f k , + k 2 — k 2 — k , Л
— k 2 k 2 0
v — k , 0 k 0 + k , v

f m , 0 0 ) 0 m 2 0
( 0 0 m 3 J
• e
~
• •
~
- x2
• •■
~ x 3
= 0. (15)
Очевидно, что так как :Х 3 = х 0 , m 3 = m 0 - m 1 - m 2 , то система уравнений (15) совпадает с системой уравнений (14). Кроме того, следует отметить, что частоты собственных колебаний, найденные по уравнениям (13), совпадают с частотами по (14) и (15). При этом собственные формы колебаний, приведенные к глобальной системе координат, совпадают с соответствующими формами, определенными по (14) и (15). Если в (13)-(15) положить k 0 = 0 , получим уравнения колебаний свободной системы.
ПРИМЕР ОСВОБОЖДЕНИЯ РАСЧЕТНОЙ МОДЕЛИ
На рис. 2 представлена условная балочная модель самолёта, стоящего на трёх стойках шасси.
Балки, имитирующие шасси, закреплены следующим образом: для задней опоры запрещены перемещения в трех направлениях и по углу рыскания самолёта, а для двух передних – только перемещения по вертикали.
Предлагаемый метод был реализован в виде программы Fortran, которая в качестве исходных данных использует матрицы жесткости и масс закрепленной расчетной модели, а также
Закрепленная система
Платформа, освобожденная система
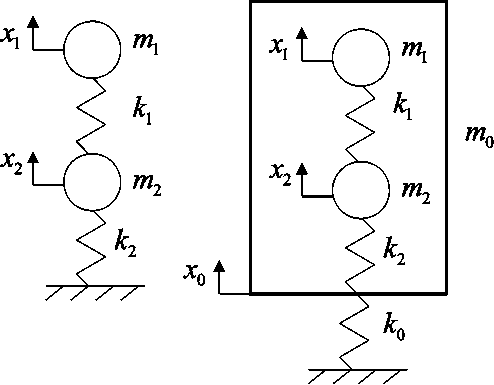
Рис. 1. Пример преобразования системы масс на пружинках
Эквивалентная система
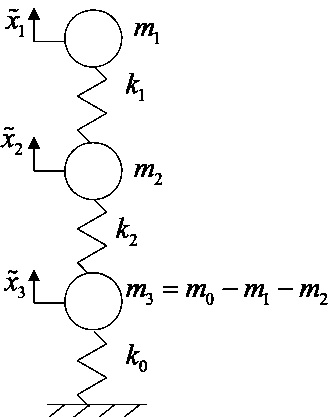
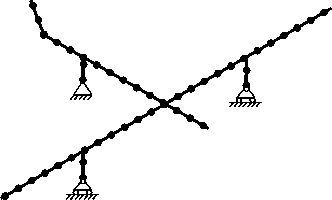
Рис. 2. Балочная модель самолёта информацию о массе и моментах инерции свободной конструкции. Результатом работы программы является матрицы жесткости и масс для свободной конструкции.
В табл. 1 приведены первые 30 частот собственных колебаний закрепленной модели, свободной модели и модели, освобожденной от закреплений по предлагаемому методу. В последней колонке показана разница в процентах между частотами свободной и освобожденной модели. Из представленных результатов следует, что частоты практически совпали между собой. Анализ форм колебаний освобожденной модели показал, что они также близки к формам колебаний свободной модели.
ЗАКЛЮЧЕНИЕ
Разработан метод освобождения математических моделей динамических систем, позволяющий восстановить расчетную модель свободного летательного аппарата после ее коррекции по результатам наземных модальных испытаний. Метод основан на том, что закрепленная модель ставится на виртуальную подвижную платформу, которая имеет инерционные характеристики исходной свободной конструкции. Это допускает движение модели, соответствующее движению абсолютно жесткого тела. Процедура осво-
Таблица 1. Результаты расчета
Список литературы Метод освобождения динамической расчетной модели летательного аппарата
- О современных методиках наземных испытаний самолетов в аэроупругости / П.Г. Карклэ, В.А. Малютин, О.С. Мамедов, В.Н. Поповский, А.В. Смотров, В.И. Смыслов // Уч. записки ЦАГИ им. Н.Е. Жуковского, 2012, вып. 2708. 34 с.
- Карклэ П.Г., Смыслов В.И. Модальные испытания летательных аппаратов и воспроизведение силовых воздействий. М.: ТЕХНОСФЕРА, 2017. 156 с.
- Вард Хейлен, Стефан Ламменс, Пол Сас. Модальный анализ: теория и испытания. М.: ООО «Новатест», 2010. 319 с.
- Бернс В. А., Жуков Е. П., Маринин Д. А., Маленкова В.В. Экспериментальный модальный анализ летательных аппаратов на основе монофазных колебаний // Известия Самарского научного центра РАН. 2018. Том 20. № 4. С. 43-54.
- Solar Impulse - How to validate the numerical model of a superlight aircraft with A340 dimensions! / M. Böswald, Y. Govers, A. Vollan, M. Basien // Proceedings of ISMA2010 International Conference on Noise and Vibration Engineering including USD2010, Leuven, Belgium, 2010. P. 2451-2466.
