Метод построения автоматизированной системы контроля движения и технического состояния грузовых транспортных средств

Автор: Сафиуллин Р.Н., Ефремова В.А., Пеплер А.Э.
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Диагностика и ремонт
Статья в выпуске: 3 (65), 2023 года.
Бесплатный доступ
В статье описан один из методов построения автоматизированной системы контроля технического состояния грузовых транспортных средств в процессе движения с применением бортовой информационно-управляющей системы. Целью применения системы является повышение эффективности перевозочного процесса грузовыми транспортными средствами на автомобильной дороге. Решение поставленной задачи предполагается за счет внедрения в существующую подсистему контроля технического состояния транспортных систем функции удаленного диагностирования в режиме реального времени. Реализация процесса диагностирования осуществляется при помощи динамичного матричного QR-кода и средств фотовидеофиксации. Описан процесс проведенного эксперимента по моделированию матричного QR-кода на основании полученных данных, таких как температура двигателя и вес перевозимого груза.
Весогабаритный контроль, бортовая информационно-управляющая система, грузовой транспорт, тяжеловесные транспортные средства, автоматизированная система контроля
Короткий адрес: https://sciup.org/148327029
IDR: 148327029 | УДК: 656.13
Method of construction of automated system for traffic control and technical condition of freight vehicles
The article describes one of the methods for constructing an automated system for monitoring the technical condition of freight vehicles in the process of movement using an onboard information and control system. The purpose of the application of the system is to increase the efficiency of the transportation process by freight vehicles on the road. The solution of the task is supposed due to the introduction of the function of remote diagnostics in real time into the existing subsystem for monitoring the technical condition of transport systems. The implementation of the diagnostic process is carried out using a dynamic matrix QR code and photo and video recording tools. The process of the conducted experiment on modeling a matrix QR code based on the data obtained, such as engine temperature and the weight of the cargo being transported, is described.
Текст научной статьи Метод построения автоматизированной системы контроля движения и технического состояния грузовых транспортных средств
Развитие автономного и полуавтоном-ного вождения может быть использовано при организации грузоперевозок. На данный момент существующие исследования в основном направлены на оснащение интеллектуальными транспортными системами легковых автомобилей, в то время как алгоритмам и моделям самоуправляемых грузовиков также требуется совершенствование. Реализовать беспилотное вождение можно при помощи внедрения бортовых ин-формационно-управляющих систем (БИУС) в состав грузового транспортного средства (ТС). БИУС представляет собой программно-аппарат- ный комплекс, имеющий возможность управлять транспортным средством, осуществлять контроль технического состояния транспортных систем, адаптировать динамику движения транспортного средства под соответствующие условия и задачи. Система состоит из совокупности радаров, лидаров и датчиков, позволяющих отслеживать местоположение ТС, распознавать окружающие его объекты, определять состояние дорожного покрытия и пр.
Разработка системы ведется на основе сервис-ориентированного программного обеспечения Platooning, позволяющее осуществлять работу оборудования независимо друг от друга.
В исследованиях модули моделирования, включающие реалистичную модель грузовика, основываются на данных, собранных с экспериментального транспортного средства, для которого была построена имитированная дорожная среда на основе реальных автомобильных дорог и реалистичного транспортного потока.
Проезд тяжеловесных транспортных средств регламентируется нормативно-правовыми актами Правительства Российской Федерации и Министерством транспорта. Превышение допустимой массы перевозимых грузов или осевых нагрузок тяжеловесных транспортных средств приводит к преждевременному разрушению дорожного полотна, что, в свою очередь, влечет снижение безопасности дорожного движения и дополнительные финансовые затраты на восстановление дорог. С целью выявления фактов проезда транспортного средства с превышенным допустимым весом или габаритами используется система весогабаритного контроля.
При этом, остается ряд нерешенных задач, таких как отсутствие полной цифровой базы автомобильных дорог и транспортных средств, что затрудняет точный и непрерывный мониторинг и контроль их технического состояния. Также требуется разработка более точных и надежных алгоритмов и моделей для анализа данных и прогнозирования технических проблем на ранних стадиях. Один из способов решения поставленных задач - внедрение бортовых информационно-управляющих систем в состав тяжеловесных транспортных средств.
В ходе работы были применены методы системного анализа, динамического программирования, математического анализа, позволяющие спрогнозировать и получить результаты.
Основная часть
Система весогабаритного контроля направлена в первую очередь на сохранение целостности дорожного покрытия, а также обеспечение безопасности участников дорожного движения. Состав системы весогабаритного контроля включает в себя подсистему сбора данных с аппаратно-программного комплекса (АПВГК), подсистему обработки материалов, подсистему выдачи специальных разрешений, информационную систему центра автоматической фиксации нарушений правил дорожного движения (рис. 1).
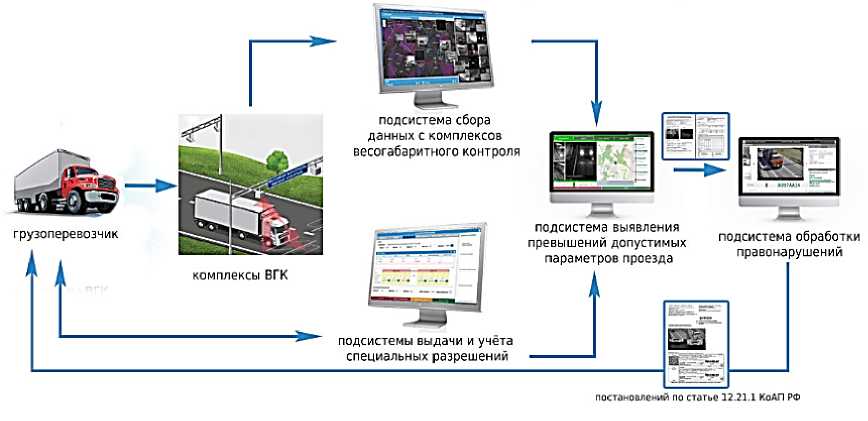
Рисунок 1 – Компоненты системы весогабаритного контроля
Бортовая информационно-управляющая система состоит из подсистем восприятия, планирования и контроля. Подсистема восприятия относится к способности автономных транспортных средств собирать информацию из различных источников и формировать представление об окружающей среде (обнаружение дорожных знаков, понимание состояния дорожного движения, определение полос движения, понимание поворотов и так далее). Автономные транспортные средства создают восприятие за счет обработки различных типов информации из различных источников транспортной инфраструктуры (рис. 2).
Была сформирована задача повышения эффективности перевозного процесса грузовых транспортных средств на автомобильной дороге:
Wi = £Pn( Т п ), Т ^ ^min, (1)
где Wi – задача повышения эффективности перевозного процесса грузовых транспортных средств на автомобильной дороге;
Pn– функции системы;
Тn – оперативность управления n-й функции.
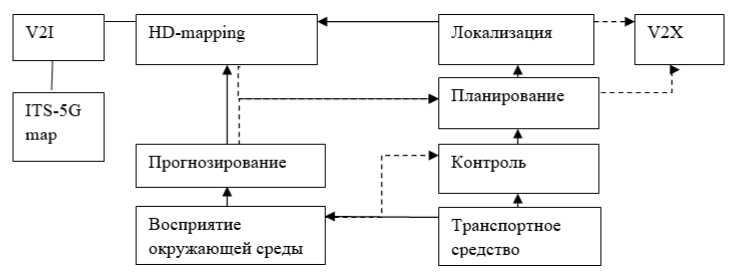
Рисунок 2 - Компоненты бортовой информационно-управляющей системы
Решение поставленной оптимизационной задачи обеспечивается за счет внедрения в систему управления движения на автомобильных дорогах автоматизированных технических средств с учетом применения передовых информационных технологий. Повышение эффективности контроля движения ТС на новом качественном уровне, обеспечивает «интеграцию» участников дорожного движения и системы управления движением на автомобильных дорогах, что способствует повышению организованности транспортных потоков, снижению перегруженности автомобильных дорог, повышению пропускной способности, увеличения средней скорости движения транспортного потока, снижению издержек и потерь при реализации задач транспортного обеспечения (рис. 3).
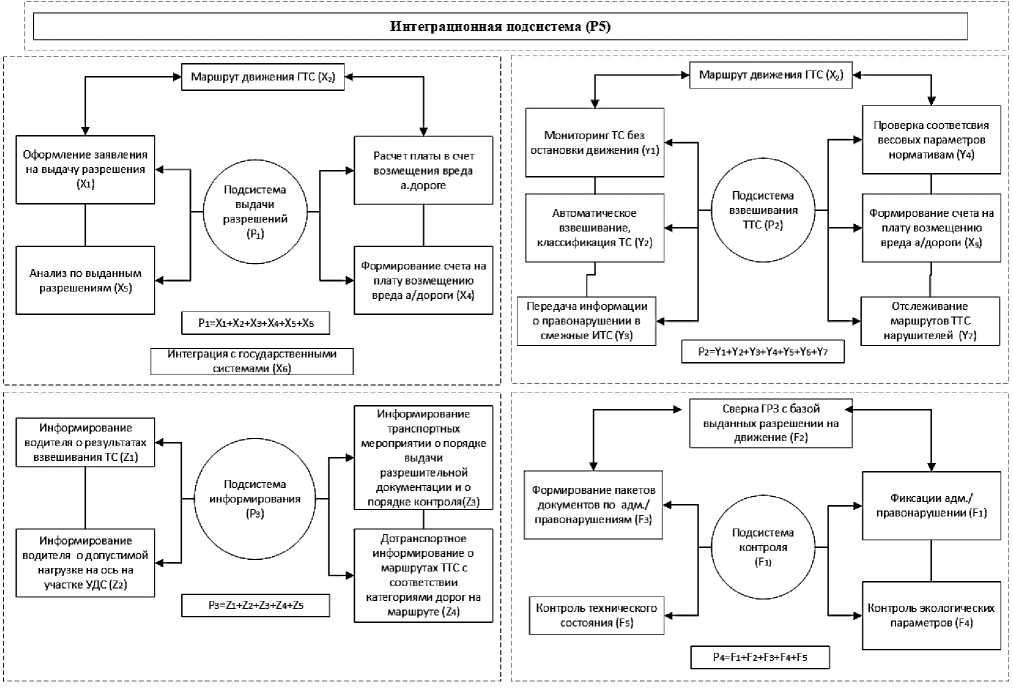
Рисунок 3 – Модель расширения функциональных возможностей подсистем ТАСУ ВК ТТС
Wn = { x1 ·
⎪y 1 ·
где xn – функция подсистемы выдачи разрешений;
yn – функция подсистемы взвешивания;
z1 – функция подсистемы информирова- ния;
f1 – функция подсистемы контроля;
Tx – время выполнения функций подсистемы выдачи разрешений;
Ty – время выполнения функций подсистемы взвешивания;
Tz – время выполнения функций подсистемы информирования;
Tf – время выполнения функций подсистемы контроля.
Определение технического состояния и его важность
Удаленный контроль технического состояния транспортных средств позволяет оперативно выявлять проблемы, которые могут представлять угрозу для безопасности, такие как неисправности тормозной системы, рулевого управления или шин. Это позволяет автотранспортным предприятиям планировать проведение технического обслуживания на основании оперативно получаемых данных, а в случае возникновения неисправности – организовать проведение ремонтных работ.
Также государственные органы устанавливают требования и стандарты для технического состояния транспортных средств, такие как проверка тормозной системы, эмиссий или освещения. Использование системы удаленного контроля технического состояния обеспечивает надежный и эффективный мониторинг соблюдения указанных требований. Государственные органы имеют возможность получать информацию о состоянии автотранспортных средств, проводить анализ данных и принимать меры в отношении транспортных средств, которые не соответствуют требованиям и стандартам
Традиционные проверки технического состояния транспортных средств часто требуют значительных ресурсов, таких как время и персонал. Удаленный контроль позволяет государственным органам сократить необходимость в ручных проверках и фокусироваться на транспортных средствах, которые демонстрируют потенциальные проблемы. Это оптимизирует проверки, и повышает концентрацию на наиболее подозрительных транспортных средствах, что позволяет быстро реагировать на выявленные проблемы и более эффективно использовать имеющиеся ресурсы.
Одним из дополнительных преимуществ удаленного контроля технического состояния для государственных органов является его способность предотвращать и реагировать на аварийные ситуации. Благодаря системе удаленного контроля, государственные органы могут получать предупреждения о потенциальных проблемах, таких как неисправности тормозной системы или проблемы с управлением, что позволяет принять меры для предотвращения возможных аварий.
Разработка автоматизированного системы контроля технического состояния. Предложенное техническое решение
Согласно целям концепции «Создания и функционирования национальной сети интеллектуальных транспортных систем на автомобильных дорогах общего пользования» необходимо создание и развитие федеральной платформы национальной сети ИТС, в связи с этим предлагается, в качестве средств контроля состояния транспортных средств использовать автоматизированные пункты весогабаритного контроля.
Для осуществления передачи данных от автомобиля к системе контроля предлагается использовать матричный QR-код, содержащий информацию о параметрах транспортного средства и обновляющийся в заданной периодичностью. Надзор и контроль технического состояния ТТС предполагается организовать за счет выведения подлежащих контролю параметров на монитор расположенный в передней части автомобиля и их считывании с помощью средств фотовидеофиксации.
Для осуществления процесса диагностирования необходимо дополнить систему АПВГК: установить камеры для считывания QR-кода и контроллер для обработки получаемых данных (рис. 4). При этом для осуществления передачи данных необходимы проводные межблоковые соединения, позволяющие организовать передачу данных по скоростным защищенным канала связи на скорости 100Mb и выше. Дополнительные каналы передачи данных предусмотрены при изначальном проектировании системы для возможности ее модернизации в последующем.
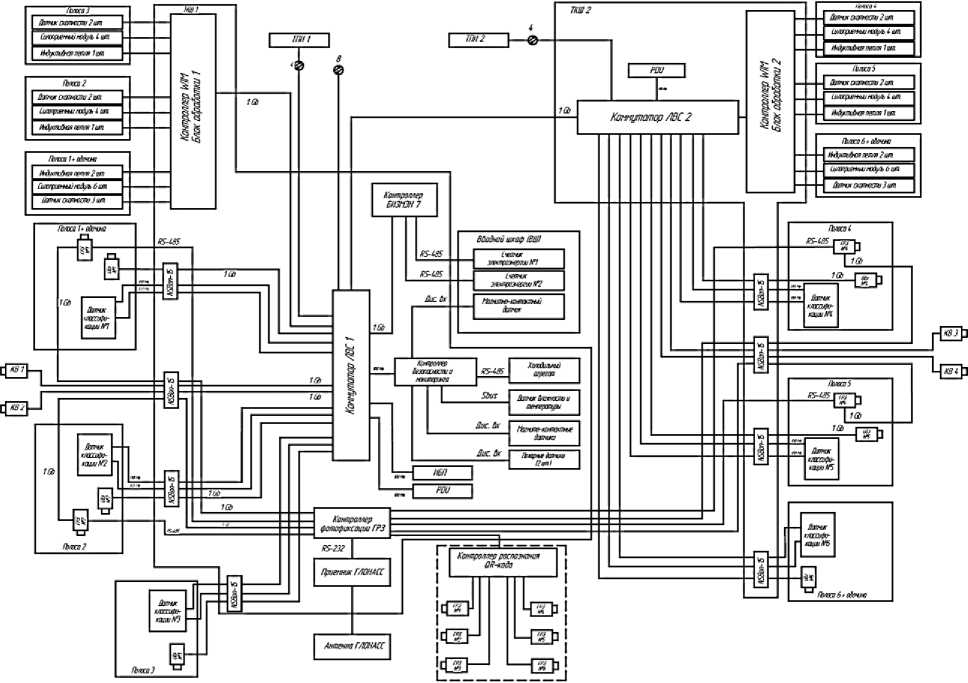
Рисунок 4 – Структурная схема конфигурации оборудования весогабаритного комплекса после модернизации
Данные, обработанные контроллером QR-кода, поступают в блок контроля государственных регистрационных знаков, после формируется общий массив данные, которых передается через защищенный канал связи, с использованием системы ГЛОНАСС.
Изменения, затрагивающие транспортное средство. В транспортное средство необходимо внедрить бортовое оборудование производящее сбор, хранение и обработку параметров технического состояния тяжеловесного транспортного средства, включая вес автомобиля. Полученные данные выводятся в виде зашифрованного матричного QR- кода, на расположенный в передней части автомобиля монитор, расположенный в передней части автомобиля.
Считать его значение можно с помощью устройств, обрабатывающих изображение как двухмерное. Обработка идет до тех пор, пока содержащаяся в коде информация не будет распознана. Для распознавания QR-кода достаточно камеры с достаточным разрешением и соответствующим программным обеспечением. К преимуществам двумерного кода можно отнести сканирование в любой ориентации, вне зависимости от того QR-код перевернут или под углом, он будет считан сканером идеально и безошибочно.
Алгоритм работы системы представлен следующим образом. В момент проезда транспортного средства через зону контроля (рис.5.) датчики присутствия определяют факт проезда транспортного средства, что переводит систему в рабочий режим. После чего происходит идентификация ТС, посредством распознания государственного регистрационного знака и определение весогабаритных параметров. Следующим этапом является сравнение фактических весогабаритных параметров ТС с допустимыми параметрами или параметрами, указанными в соответствующем разрешении. Дальнейшим этапом является считывание и распознание матричного QR-кода. С матричного QR-кода может быть получена информация о параметрах рулевого управления, тормозной системы и т.д. Помимо этого данная система позволит выполнять следующие функции:
-
- обеспечить контроль над безопасностью движения;
-
- анализировать дорожно-транспортную инфраструктуру в режиме реального времени;
-
- выбирать оптимальный скоростной режим движения;
-
- передавать данных о весогабаритных параметрах транспортного средства при установке соответствующих датчиков на автомобиль;
-
- выполнять автоматизированную про- - принимать решения о возможности оста-
- верку электронных перевозочных документов новки ТС с целью устранения неисправностей, с
которыми запрещено продолжать движения.
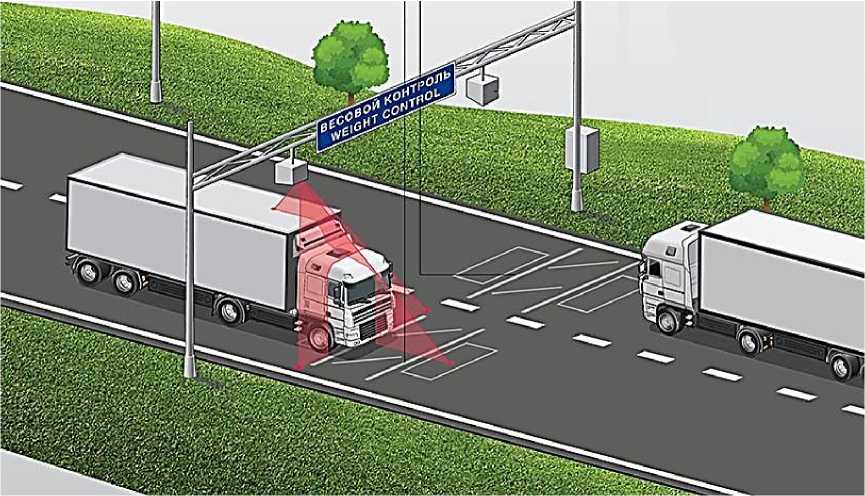
Рисунок 5 – Функциональная модель системы автоматизированного весогабаритного Контроля
Работа данной системы сводится к получению данных о техническом состояний конкретного транспортного средства и принятию решения о возможности его дальнейшей эксплуатации. Алгоритм работы системы после внесения изменении в работу АПВГК представлен на рис.6.
В целях реализации предложенного метода удаленного контроля была создана модель на основе микроконтроллера Arduino Uno и дисплейного модуля. В рамках эксперимента по созданию матричного QR-кода, содержащего контролируемые параметры, были выбраны датчик температуры охлаждающей жидкости и тензодатчик. Датчик веса, к примеру, может быть использован для контроля массы автомобиля на этапе погрузочно-разгрузочных работ или для повышения точности измерении получаемых от встроенных в дорожное полотно датчиков веса. Для реализации идеи в среде Arduino IDE был написан программный код, позволяющий генерирующий матричный QR-код на основании получаемых данных. Модель может быть запита в широком диапазоне напряжении от 5 до 30 вольт, что позволяет питать ее, в том числе от бортовой сети автомобиля.
Контролируемые параметры можно выводить как виде как уже в обработанных дан- ных, так и в «сыром» виде. Данные можно выводить с заданной периодичностью и продолжительностью.
Выводы
В данной статье рассмотрена архитектура бортового информационно-управляющего оборудования, внедряемого в состав транспортных средств, с целью повышения эффективности перевозочного процесса грузовыми транспортными средствами. Внедрение автоматизированных систем обеспечивает требуемые показатели надежности транспортных средств за счет удаленного контроля состояния транспортного средства в режиме реального времени. Для реализации системы удаленного диагностирования предложена функциональная модель автоматизированной системы контроля технического состояния транспортных средств. Техническое решение позволяет связать автоматизированную систему весогабаритного контроля и бортовую информационно-управляющую систему автомобиля. В ходе эксперимента написано программное обеспечение, позволяющее генерировать динамичный матричный QR-код, содержащий данные получаемые от контролируемых датчиков. Создана модель, реализующая функцию вывода матричного QR-кода с заданной периодичностью и частотой.
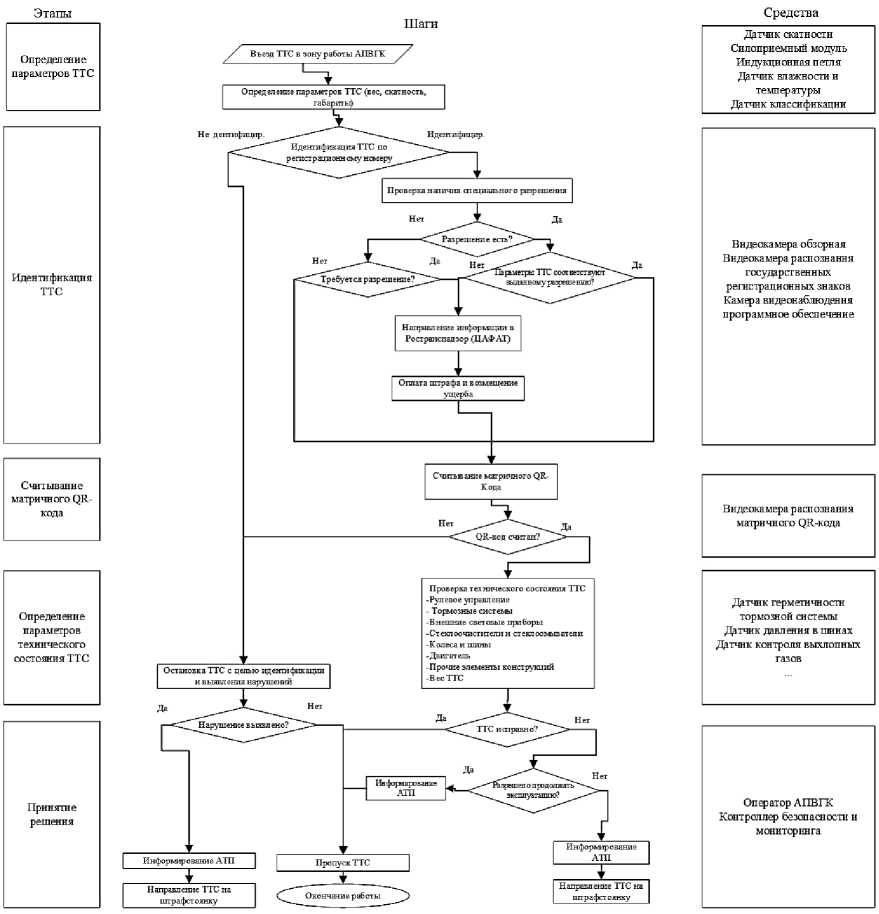
Рисунок 6 – Алгоритм функционирования автоматизированной системы контроля технического состояния движения и технического состояния грузового транспортного средства
Список литературы Метод построения автоматизированной системы контроля движения и технического состояния грузовых транспортных средств
- Филипенко, С. В. Прогнозирование запасов и поставок запасных частей сто с использованием современных технологий и систем искусственного интеллекта / С. В. Филипенко // Инженерные кадры - будущее инновационной экономики России. - 2022. - № 1. - С. 124-126. EDN: IPEVZM
- Сафиуллин, Р. Н. Применение QR-кодов в организации контроля за эксплуатацией транспортных средств / Р. Н. Сафиуллин, Д. А. Голубев //- 2019. - Т. 1, № 10(37). - С. 954-959. EDN: HHCVTA
- Сафиуллин, Р. Н. Перспективы развития автоматизированной системы фотовидеофиксации административных нарушений в РФ с целью создания информационно-аналитической системы взаимодействия с интеллектуальными бортовыми транспортными системами / Р. Н. Сафиуллин, И. В. Ворожейкин // Актуальные направления научных исследований XXI века: теория и практика. - 2016. - Т. 4, № 5-3(25-3). - С. 342-346. EDN: WZQDXP
- Варнаков, В. В. Оптимизация поставок запасных частей при техническом сервисе автотранспортных средств / В. В. Варнаков, Е. В. Коткова, Р. М. Абдуллов //- 2018. - Т. 2, № 7(23). - С. 866-869. EDN: XWOPDV
- Menukhova, T. A.Intelligent system for centralized freight traffic planning / T. A. Menukhova, Y. V. Borodina // IOP Conference Series: Earth and Environmental Science: Issue 7 Transportation of Mineral Resources, Saint-Petersburg, 12-13 апреля 2018 года. Vol. 194. - Saint-Petersburg: Institute of Physics Publishing, 2018. - P. 072008. DOI: 10.1088/1755-1315/194/7/072008 EDN: AWJRLX
- Афанасьев, А. С. Анализ разработок в сфере удаленного диагностирования на автомобильном транспорте / А. С. Афанасьев, П. В. Евстафьев, Д. В. Сигин // Системный анализ и логистика. - 2022. - № 4(34). - С. 103-108. DOI: 10.31799/2077-5687-2022-4-103-108 EDN: CCYSIO
