Метод повышения точности планетарных передач на основе спектрального анализа экспериментальной оценки и математического моделирования кинематических погрешностей

Автор: А.В. Капитонов, В.С. Дроздов
Журнал: Материалы и технологии @mat-tech
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1 (15), 2025 года.
Бесплатный доступ
Для современного машиностроения требуются механизмы с высокими кинематическими и динамическими характеристиками и небольшими затратами на изготовление. Планетарные зубчатые передачи широко используются в машинах и механизмах. Одной из основных проблем при производстве этих передач является сложность их изготовления с высокой точностью. Планетарные передачи с промежуточными телами качения наиболее технологичны по сравнению с планетарными зубчатыми передачами и могут обеспечивать высокую кинематическую точность и плавность работы при небольших затратах. Для этих передач разработан метод повышения точности на основе спектрального анализа гармонических составляющих кинематической погрешности, полученных при экспериментальной оценке на автоматизированном стенде. Разработанный метод позволяет при проектировании повышать точность передачи путем уменьшения погрешностей только наиболее ответственных ее деталей, уменьшая при этом затраты на изготовление. Метод также включает компьютерное моделирование, позволяющее дать оценку влияния динамических нагрузок и погрешностей изготовления на кинематическую точность передачи. Метод может быть использован при создании механизмов для современного производства на основе планетарных передач с промежуточными телами качения.
Планетарные передачи, кинематическая погрешность, спектральный анализ, погрешность изготовления
Короткий адрес: https://sciup.org/142245434
IDR: 142245434 | УДК: 621.83.06 | DOI: 10.24412/2617-149X-2025-1-29-39
Method for Improving the Accuracy of Planetary Transmissions based on Spectral Analysis Experimental Evaluation and Mathematical Modeling of Kinematic Errors
Contemporary mechanical engineering requires mechanisms with high kinematic and dynamic characteristics and low manufacturing costs. Planetary gears are widely used in machines and mechanisms. One of the main problems in the production of these gears is the difficulty of manufacturing them with high precision. Planetary gears with intermediate rolling elements are the most technologically advanced compared to epicycloidal gear and can provide high kinematic accuracy and smooth operation at low cost. For these transmissions, a method has been developed to increase accuracy based on spectral analysis of the harmonic components of the kinematic error experimentally evaluated on an automated stand. The developed method makes it possible to increase the accuracy of transmission during design by reducing the errors of only the most critical parts, while reducing manufacturing costs. The method also includes computer modeling, which makes it possible to assess the effect of dynamic loads and manufacturing errors on the kinematic accuracy of transmission. The method can be used to create mechanisms for modern production based on planetary gears with intermediate rolling elements.
Текст научной статьи Метод повышения точности планетарных передач на основе спектрального анализа экспериментальной оценки и математического моделирования кинематических погрешностей
К планетарным передачам предъявляются высокие требования точности изготовления, так как точность значительно влияет на работоспособность, надежность и ресурс работы планетарной передачи или планетарного механизма, а также на возможность сборки его деталей зацепления. В планетарных передачах и редукторах с промежуточными телами качения вращение передают сателлиты – шарики или ролики, последние могут быть цельными и сборными [1–3].
Эти передачи используются в приспособлениях для металлорежущих станков, в подъемно-транспортных механизмах, механизмах автоматизированного производства. Часто они бывают более эффективны, чем зубчатые передачи, так как при возможных больших передаточных отношениях имеют более технологичную конструкцию и меньшую стоимость.
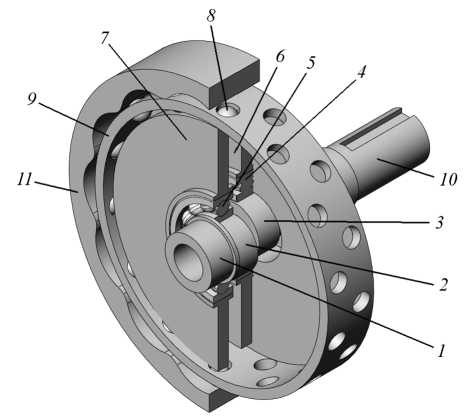
На рисунке 1 представлена планетарная передача с шариковым зацеплением.
Передача состоит из ведущего вала 1, эксцентриков 2 и 3, установленных на ведущем валу, подшипников 4 и 5, установленных на эксцентрики, ведущих дисков 6 и 7, наружные цилиндрические поверхности которых образуют ведущую беговую дорожку. Промежуточные тела качения шарики 8 являются сателлитами.Они установлены в два ряда в отверстиях водила 9, связанного с ведомым валом 10. Колесо 11 с многопериодной беговой дорожкой является неподвижным звеном. При вращении ведущего вала 1, а вместе с ним эксцентриков 2 и 3, подшипников 4 и 5, дисков 6 и 7 шарики 8 входят в зацепление с беговыми дорожками и отверстиями водила и передают вращение от ведущего вала к ведомому. Профиль многопериодной дорожки колеса 11 является эквидистантой периодической кривой, пописываемой математической зависимостью:
ρ2 = AR2 - A2 sin2 zφ + A cos zφ , (1) где ρ2 – радиус-вектор точки периодической кривой; R – средний радиус периодической кривой; A – амплитуда (эксцентриситет) периодической кривой; z – число периодов кривой; φ – угол, задаваемый между точками периодической кривой.
Передаточное отношение i передачи определяется по формуле:
-
1 – ведущий вал; 2 и 3 – эксцентрик;
-
4 и 5 – подшипник; 6 и 7 – ведущий диск;
8 – сателлиты; 9 – водила; 10 – ведомый вал;
11 – колесо
-
1 – drive shaft; 2 and 3 – eccentric;
-
4 and 5 – bearing; 6 and 7 – drive disc;
8 – satellites; 9 – drivers; 10 – driven shaft;
-
11 – the wheel
Рисунок 1 – Планетарная шариковая передачаFigure 1 – Planetary ball gear i = (z1 + z2 ) / z1, (2)
где z1 – число периодов ведущей беговой дорожки, z2 – число периодов неподвижной многопериодной беговой дорожки.
В представленной конструкции передачи (рис. 1) z1 = 1 .
Такую же кинематику, как у планетарных шариковых передач, имеют планетарные передачи с роликовым зацеплением [3].
Повышение точности изготовления является наиболее важной задачей для этих передач. Известны исследования, заключающиеся в разработке метода повышения точности зубчатых передач при сборке [4]. Метод заключается в определении разности началь- ных фаз поворота шестерни и колеса, при которой суммарная кинематическая погрешность передачи достигает минимума. Реализация метода заключается в том, что кинематическая погрешность описывается гармонической функцией, при этом номера зубьев шестерни и колеса для монтажа подбираются в противофазе их первых гармоник.
В исследованиях [5] механизма с циклоидальным редуктором с телами качения повышение плавности вращения редуктора обеспечивались определением оптимальной геометрии профиля зуба компьютерным моделированием с учетом неточности его формообразования при изготовлении.
Результаты исследования точности механических передач приведены в [6].В этих исследованиях на основе гармонического анализана на базе рядов Фурье получены графики кинематических погрешностей и их амплитудных спектров механических передач. Предложены методы обработки сигналов и способы фильтрации шумов при измерениях с помощью разработанной системы контроля. Предложены методы оценки точности зубчатых и других типов передач. Показаны некоторые причины образования гармоник в спектре кинематической погрешности.
Особенностью предложенного метода повыше- ния точности передач в отличие от известных и приведенных выше методов и результатов исследований является концепция, заключающаяся в повышении точности только тех деталей, которые в наибольшей степени определяют кинематическую погрешность передачи. Поэтому для определения наиболее значимых точностных параметров исследуемых передач предложен метод, основанный на спектральном анализе, который заключается в получении экспериментальных графиков и амплитудно-частотных спектров кинематических погрешностей и определении наиболее значимых гармонических составляющих спектров с целью установления причинно-следственных связей между гармоническими составляющими с наибольшими амплитудами и точностью изготовления деталей передачи.
ОСНОВНАЯ ЧАСТЬ
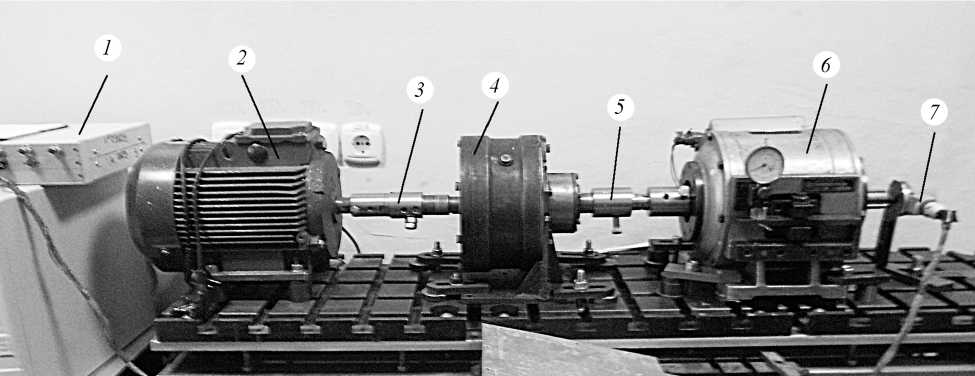
Экспериментальные исследования проводились на разработанном стенде [1, 2] для испытаний механических передач под нагрузкой. На рисунке 2 представлен автоматизированный стенд, который использовался для исследования кинематической точности и плавности работы механических передач (редукторов).
-
1 – аналого-цифровой преобразователь; 2 – электродвигатель; 3 и 5 – муфта; 4 – исследуемый редуктор;
6 – электромагнитный тормоз; 7 – датчик угла поворота (энкодер)
1 – analog-to-digital converter; 2 – electric motor; 3 and 5 – coupling; 4 – gearbox under study;
6 – electromagnetic brake; 7 – rotation angle sensor (encoder)
Рисунок 2 – Автоматизированный стенд для исследования кинематической точности и плавности работы механических передач
Figure 2 – Automated stand for studying the kinematic accuracy and smoothness of mechanical transmissions
Стенд (рис. 2) состоит из исследуемого редуктора 4, ведущий вал которого соединен через муфту 3 с электродвигателем 2, а ведомый вал соединен через муфту 5 с электромагнитным тормозом 6, создающим нагружающий момент на ведомом валу редуктора. К валу электромагнитного тормоза соосно установлен датчик угла поворота (энкодер) 7, соединенный с аналого-цифровым преобразователем 1, который подключен к ПЭВМ. При вращении электродвигателя 2 без нагрузки и с нагрузкой, создаваемой электромагнитным тормозом 6, неравномерность вращения ведомого вала передачи, возникающая из-за погрешностей изготовления, упругих деформаций, динамических нагрузок, зазоров в зацеплении фиксируется датчиком угла поворота 7 и в виде импульсов (сигналов) поступает на аналого-цифровой преобразователь 1 и ПЭВМ. После математического преобразования полученных сигналов с помощью разработанного программного обеспечения определяется кинематическая погрешность редуктора Fi , которую можно представить математическими выражениями:
где Ti – период следования импульсов (сигналов); i – число периодов за оборот ведомого вала; Tср – среднее число периодов; ωср – средняя угловая скорость ведомого вала; nср – средняя частота вращения ведомого вала.
В качестве примера представлены результаты экспериментальных исследований, полученные на автоматизированном стенде (рис. 2), кинематических характеристик планетарных редукторов с промежуточными телами качения с номинальной частотой вращения ведущего вала n1 = 1500 мин-1, изготовленных с точностью размеров наиболее ответственных деталей по 7 и 8 квалитету и с точностью их формы и расположения поверхностей, соответствующей 7 степени.
На рисунке 3 показан график кинематической погрешности Fi при числе измерений N за оборот выходного вала планетарного роликового редуктора с передаточным отношением i = 11, с числом периодов многопериодной беговой дорожки z2 = 10, а на рисунке 4 амплитудно-частотный спектр, рассчитанный и построенный по значениям графика на рисунке 3, на котором представлены амплитуды A гармонических составляющих (гармоник) k .
На рисунках 5 и 6 показаны графики кинематической погрешности Fi планетарного шарикового редуктора с передаточным отношением i = 49 в зависимости от угла поворота ведомого вала φ2 без нагрузки и с нагрузкой 100 Нм. Редуктор имеет две ступени. Передаточное отношение каждой ступени равно 7. Число периодов многопериодной беговой дорожки в каждой ступени редуктора z2 = 6.
На рисунках 7 и 8 представлены графики амплитудно-частотных спектров кинематической погрешности планетарного шарикового редуктора с передаточным отношением i = 49 без нагрузки и с нагрузкой 100 Нм, на котором представлены амплитуды A гармонических составляющих (гармоник) k .
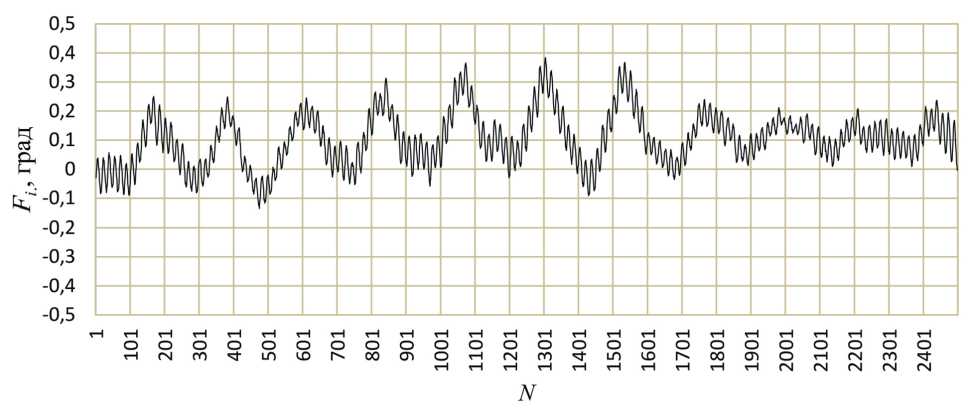
Рисунок 3 – Кинематическая погрешность планетарного роликового редуктора
Figure 3 – Kinematic error of a planetary roller gear reducer
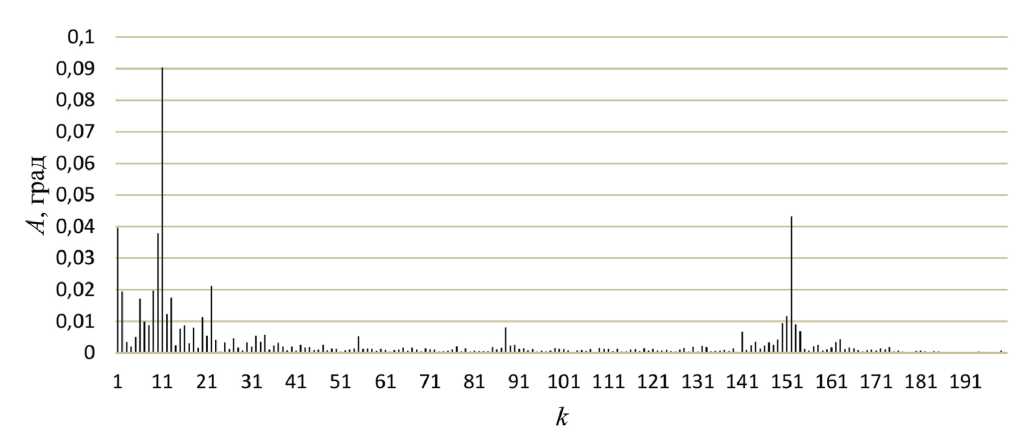
Рисунок 4 – Амплитудно-частотный спектр кинематической погрешности планетарного роликового редуктора
Figure 4 – Amplitude-frequency spectrum of the kinematic error of a planetary roller gear reducer
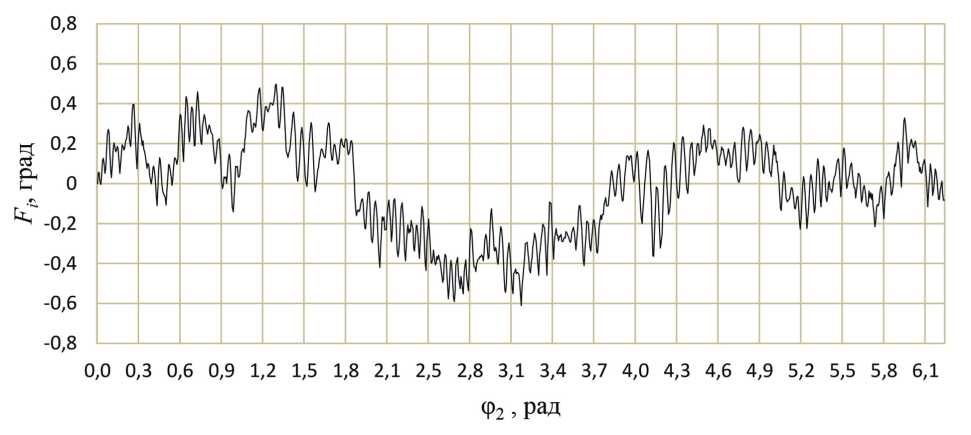
Рисунок 5 – График кинематической погрешности планетарного шарикового редуктора без нагрузки
Figure 5 – Graph of kinematic error of planetary ball gearbox without load
На графиках (рис. 3, 5 и 6) размах между наибольшим и наименьшим значением определяет наибольшую кинематическую погрешность редуктора, которая характеризует его кинематическую точность. На графике (рис. 3) выделяются волны, число которых соответствует передаточному отношению i = 11 и гармонике с номером 11 (рис. 4), а на графике (рис. 5) выделяется число волн равное 12 и кратное числу периодов беговой дорожки z2 = 6 и гармонике с номером 12 (рис. 7), при этом величины амплитуд гармоник 11 и 12 характеризуют плавность работы редукторов.
Кинематическую погрешность передачи F(p) можно представить через гармонические составляющие ряда Фурье [1, 7, 8]:

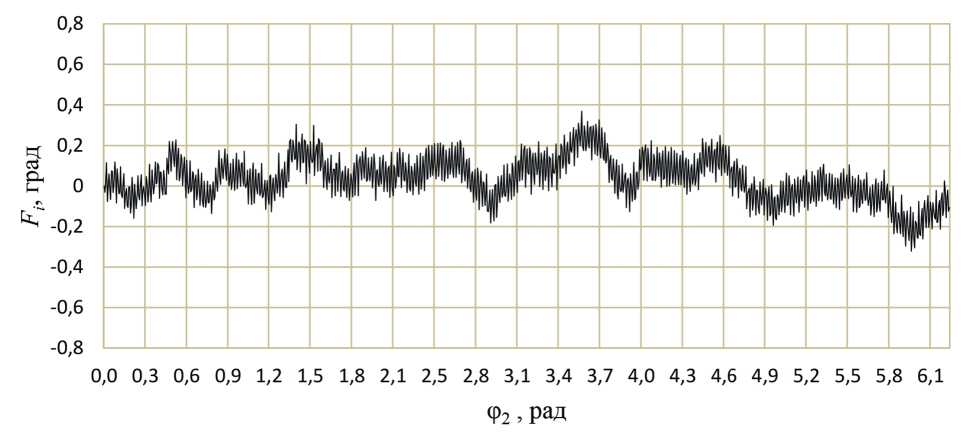
Рисунок 6 – График кинематической погрешности планетарного шарикового редуктора с нагрузкой
Figure 6 – Graph of kinematic error of planetary ball gearbox with load
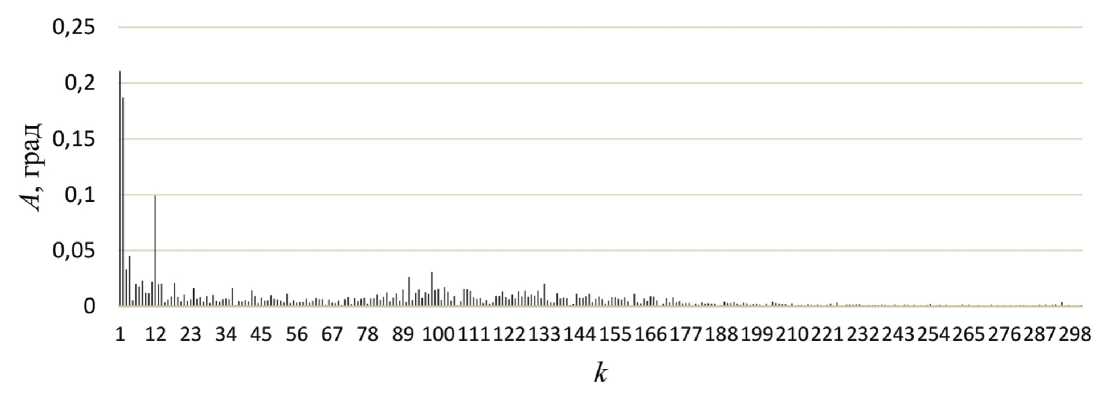
Рисунок 7 – Амплитудно-частотный спектр кинематической погрешности планетарного шарикового редуктора без нагрузки
Figure 7 – Amplitude-frequency spectrum of the kinematic error of a planetary ball gearbox without load где c0 – нулевой член и c0/2 равно среднему значению функции за период T = 2π; ck – амплитуда гармонической составляющей; ak, bk – коэффициенты ряда Фурье; k – порядковый номер гармонической составляющей; φ – угловая координата точки профиля беговой дорожки; φk – начальный фазовый угол.
По математическим зависимостям (5)…(8) можно найти амплитуды ck гармонических составляющих и построить амплитудно-частотный спектр.
Анализ амплитудно-частотных спектров, построенных по результатам многократной экспериментальной оценки кинематических погрешностей передач, изготовленных с разной точностью деталей, позволил установить причинно-следственные связи между наиболее значимыми гармониками и погреш- ностями изготовления, которые проявляются в амплитудах этих гармоник.
Для планетарного роликового редуктора в амплитудно-частотном спектре (рис. 4) наибольшие амплитуды имеют гармонические составляющие (гармоники) с номерами 1, 10, 11, 22 и 152, а для планетарного шарикового редуктора наибольшие амплитуды имеют гармоники с номерами 1, 2, 6, 12 и 294 (рис. 7 и 8). Гармоники с номерами 1 и 2 имеют технологические причины, связанные с радиальными смещениями ведомого и неподвижного звеньев, в частности, с отклонением от соосности оси ведомого вала относительно оси многопериодной беговой дорожки при сборке. Гармоники 10, 11, 22 для планетарного роликового редуктора и 6, 12 для плане-
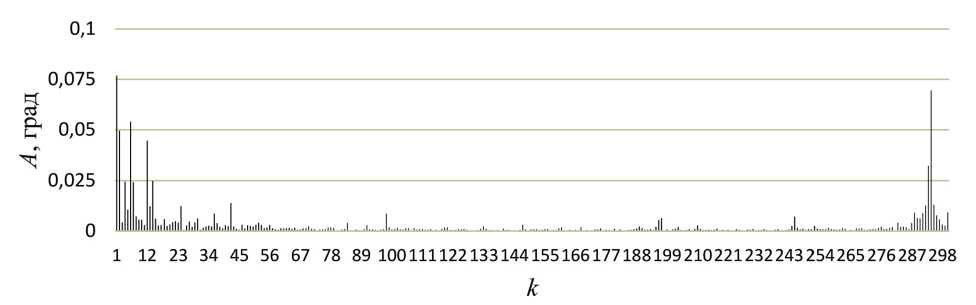
Рисунок 8 – Амплитудно-частотный спектр кинематической погрешности планетарного шарикового редуктора с нагрузкой
Figure 8 – Amplitude-frequency spectrum of the kinematic error of a planetary ball gearbox with load тарного шарикового редуктора соответствуют числу периодов многопериодных беговых дорожек z2 , передаточному отношению i, а также являются кратными z2 и i. Их амплитуды связаны с погрешностью шага периодов (волн) многопериодной дорожки при ее чистовой и отделочной обработке, погрешностью эксцентриситета при изготовлении ведущего эксцентрика, установленного на входном валу; смещением оси ведущего вала относительно оси многопериодной дорожки при сборке. Гармоники 152 и 294 характеризуют циклические погрешности высокой частоты. Большие амплитуды этих гармоник кратны передаточному отношению и числу периодов беговых дорожек и связаны с зазорами в зацеплении, зависящими от точности проектирования и изготовления профилей многопериодных дорожек и рабочих поверхностей водила. При больших зазорах возникает жесткий контакт при вхождении сателлитов в зацепление, что снижает плавность работы передачи.
Под нагрузкой (рис. 6 и 8) наибольшая кинематическая погрешность уменьшается за счет выборки зазоров в сопряжениях деталей и в зацеплении, а также уменьшаются амплитуды гармонических составляющих 1, 2, 6, 12 низкочастотного и среднечастотного участков спектра, но при этом значительно увеличиваются амплитуды высокочастотного участка спектра и 294-я гармоника.
Для установления влияния динамических нагрузок, упругих деформаций, неточностей проектирования профиля многопериодной дорожки, а также необходимого зазора в зацеплении проведено компьютерное моделирование планетарной шариковой передачи без погрешностей изготовления с исполь- зованием среды SolidWorks для анализа различных механизмов [9, 10]. На рисунке 9 представлено окно программы SolidWorksMotion (Анализ движения) с моделью планетарной шариковой передачи, представленной на рисунке 1. При моделировании задавались различные значения исходных параметров: задавалась частота вращения ведущего звена, нагружающий момент на ведомом звене, контакт деталей зацепления, жесткость контакта, коэффициенты трения скольжения.
В результате моделирования получены графики кинематических погрешностей при разных заданных параметрах моделирования. На рисунке 10 представлен график кинематической погрешности планетарной шариковой передачи Fi с n значениями за оборот ведомого звена, полученный моделированием с частотой вращения ведущего вала 1500 мин-1 и нагрузкой на ведомом звене 100 Нм.
При моделировании не учитывались погрешности изготовления. Кинематическая погрешность передачи Fi в результате моделирования, представленная на графике (рис. 10) имеет размах 0,058 градуса, что составляет 8,4 % от кинематической погрешности, представленной на графике (рис. 6), полученном при экспериментальных исследованиях планетарного шарикового редуктора под нагрузкой с погрешностями изготовления. Результаты моделирования показали, что динамические нагрузки без учета погрешностей изготовления дают небольшую кинематическую погрешность планетарных передач с промежуточными телами качения и основными источниками кинематической погрешности являются погрешности изготовления, которые в динамике проявляются в высокочастотных гармониках.
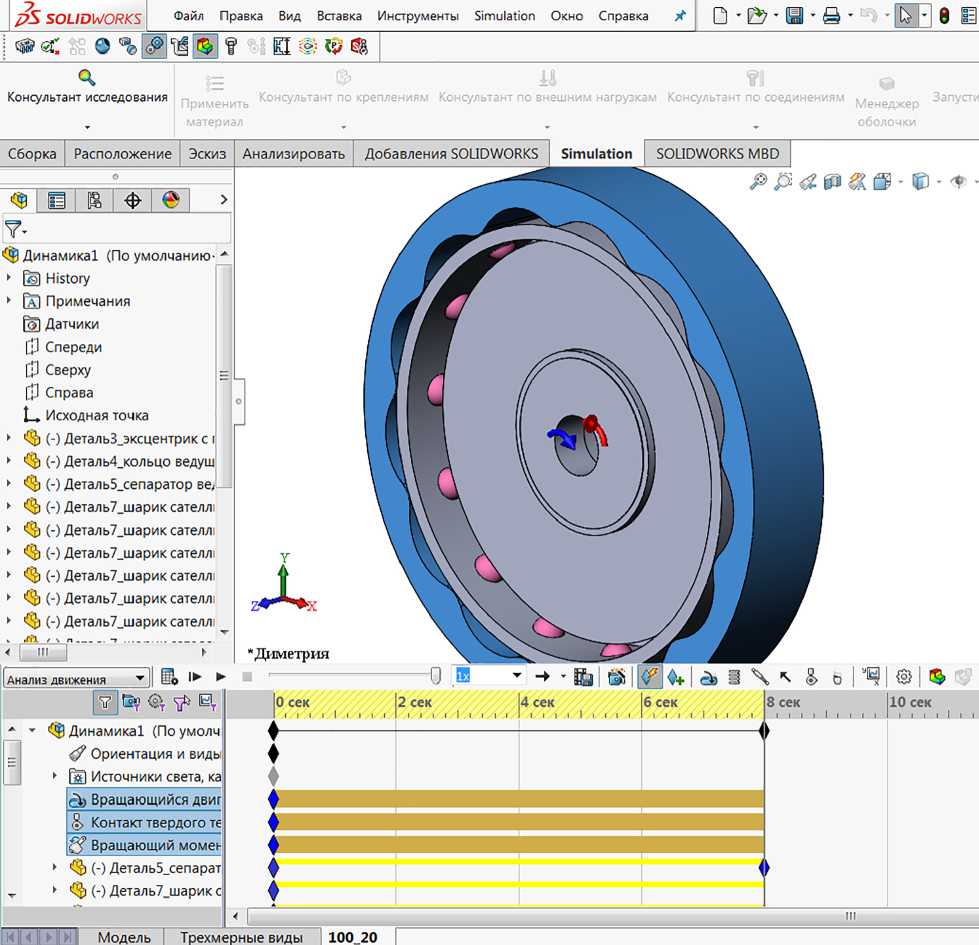
Рисунок 9 – Окно программы SolidWorksMotion с моделью планетарной шариковой передачи
Figure 9 – SolidWorksMotion program window with a model of a planetary ball gear
ЗАКЛЮЧЕНИЕ
Разработанный метод, подтвержденный результатами исследований, заключается в установлении наиболее значимых гармонических составляющих кинематической погрешности передачи, а также их связи с погрешностями изготовления. При этом повышается точность только тех деталей передачи, которые связаны с гармоническими составляющими, имеющими наибольшие амплитуды в амплитудно-частотном спектре кинематической погрешности, что позволяет повысить точность планетарных передач с промежуточными телами качения, а также уменьшить затраты на проектирование и изготовление этих передач.
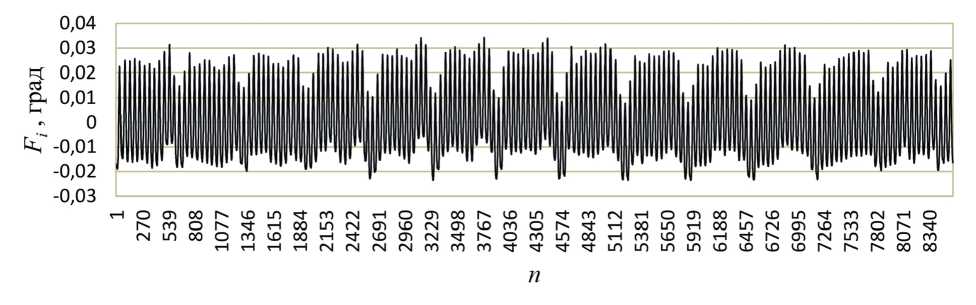
Рисунок 10 – График кинематической погрешности планетарной шариковой передачи, полученный компьютерным моделированием
Figure 10 – Graph of the kinematic error of a planetary ball gear obtained by computer modeling
