Метод преобразования космических снимков, полученных при сканирующих оптико-электронных съемках

Автор: Бутырин Сергей Анфимович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6-3 т.17, 2015 года.
Бесплатный доступ
Представляется метод преобразования космических снимков, полученных при распределенных сканирующих съемках, к единому масштабу для последующего формирования стереоизображений или для получения составного снимка из фрагментов.
Космическая сканирующая съемка, технология обработки снимков
Короткий адрес: https://sciup.org/148204324
IDR: 148204324 | УДК: 629.78
A method for transformation of the space photos obtained at the distributed scanning optoelectronic observations
We present new method for transformation of space photos to united scale, when the photos are obtained at the distributed scanning observations and further are applied for forming stereo-images or for obtaining a composite photo by fragments.
Текст научной статьи Метод преобразования космических снимков, полученных при сканирующих оптико-электронных съемках
Космические изображения имеют геометрические искажения, обусловленные различными факторами, в числе которых можно выделить панорамный эффект перспективы наблюдения, кривизну поверхности Земли, эллиптичность орбиты космического аппарата (КА), рельеф местности и другие. В типовой схеме съемочной системы сканирующего типа применяется набор оптико-электронных преобразователей (ОЭП), расположенных в фокальной плоскости (ФП) телескопа с небольшим взаимным перекрытием в продольном направлении и со сдвигом друг относительно друга в поперечном направлении. Такая конфигурация набора ОЭП и законы сканирующей космической съемки приводят к тому, что каждая строка изображения характеризуется своими параметрами, поэтому формировать единое изображение из отдельных строк можно только на основе точной информации о расположении ОЭП в ФП и кинематических параметрах пространственного движения телескопа.
Совокупное действие панорамного эффекта и эллиптичности орбиты проявляется в изменении масштаба снимков, включая различную масштабность изображения по строкам. К числу основных задач геометрических преобразований изображений земной поверхности относятся трансформирование изображений в заданную картографическую проекцию; геодезическое ориентирование изображений по опорным данным; ортотрансформирование c использованием данных цифрового рельефа местности.
Представляется метод приведения космических снимков, полученных при распределенных сканирующих съемках, к единому масштабу
для последующего формирования стереоизображений или получения составного снимка из фрагментов. Метод может быть использован для обработки снимков местности, имеющих общие части и полученных различными космическими аппаратами (КА) в группировке либо одним КА в различное время, и позволяет учитывать характеристики фактического движения КА с использованием служебной информации, сопровождающей снимки. В отличие от известных стандартных подходов [1,2] к решению близких задач, предлагаемый метод не использует процедуру ортонормирования и может применяться для обработки снимков наземных местностей с небольшим перепадом высот, либо в случае, когда не предъявляются высокие требования к их измерительным свойствам.
ПОСТАНОВКА ЗАДАЧИ
Рассматривается КА землеобзора, оснащенный телескопом с матрицами ОЭП в его ФП. При съемке поверхности Земли матрицы ОЭП работают в режиме временного запаздывания и накопления (ВЗН). Используются стандартные системы координат (СК) – инерциальная (ИСК, базис I ф ) с началом в центре Земли O ф , Гринвичская геодезическая (ГСК, базис E ), горизонтная (ГорСК, базис H = { h * } , рис. 1) с эллипсоидальными геодезическими координатами L , B и H , орбитальная (ОСК) и связанная с КА (ССК, базис B ) системы координат с началом в его центре масс (ЦМ) O . Вводятся также телескопная СК (ТСК, базис S = { s * } ) с началом в центре оптического проектирования S (рис. 1), СК поля изображения O ix* у* Z* (ПСК, базис F ) с началом в центре O * ФП телескопа и визирная СК
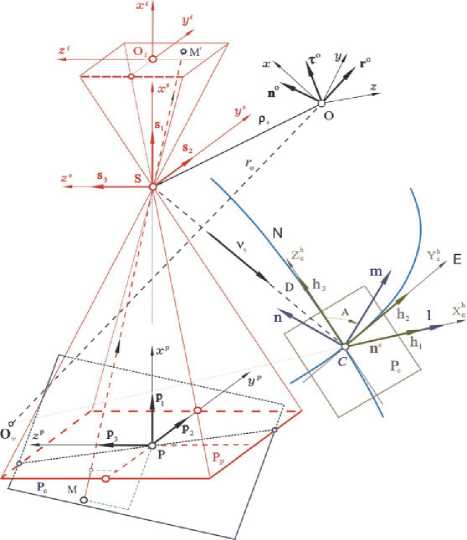
Рис. 1. Схема формирования изображения
Здесь ~ * = у * / f e и ~ * = z1 / f e являются нормированными фокальными координатами указанной точки, где fe – эквивалентное фокусное расстояние телескопа. Пусть далее векторы-столбцы to S и v S представляют в ТСК соответственно угловую скорость и скорость поступательного движения центра масс КА относительно ГСК. Тогда продольная V * (у‘,z * ) и поперечная V ~ z ( ~ y , ~ z ) составляющие вектора нормированной скорости движения изображения (СДИ) точки M ( у * , z ) вычисляются по вектор-
но-матричному соотношению
V (z * ,~ * )
V z (z * ,~ * ).
• ■ z *
■ ■ z
z * z *
i~x q ve1
i~x q ve 2
- y * to s 3 + z tof 2
i~x q ve1 +
x ~ i x
®e 3 - z to 1
x ~ i x toe2 + y toe1
. (2)
(ВСК O v x v y v z v , базис V ) с началом в центре O линейки матриц ОЭП [8]. Математическое описание съемки земной поверхности содержит модели съемочной системы (v); орбитального (r) и углового ( а ) движений КА, общеземного эллипсоида (ОЗЭ) (e) и представляется в виде
А = FB( x ", У \ H , P v , P r , P a , P e ) ;
L = F L( x v , У \ H , P v , P r , P a , P e ) .
где P v, P r, P a , p e - векторные параметры соответствующих моделей. Эти соотношения используются при решении как прямой, так и обратной фотограмметрических задач.
При наличии достаточного числа реперов в получаемых изображениях можно использовать модификации известных методов масштабирования и координатной привязки видеоинформации, полученной при сканирующих съемках [4, 6]. Пусть матрица C = | ~- | определяет ориентацию ТСК относительно ГСК, а скалярная функция D( t ) представляет дальность наблюдения вдоль оси визирования с ортом v s , см- рис.1. Представление координат произвольной точки M в основной плоскости пространства предметов Р с (рис. 1) в оптическом базисе S = { s, } и применение классических соотношений центральной проекции теории оптических систем приводит к формулам связи координат точки M и её отображения M ( y1 , z ) в основной плоскости y* O . z* базиса F :
у =- y s / xs ; ~ * =- zs / xs ;
xs = - d/ q, q = 1 - (z21~ * + z31z * )/zn
Пусть имеется два снимка наземной местности с частичным перекрытием, которые были получены с помощью сканирующей оптикоэлектронной съемки различными КА землеоб-зора либо одним КА в различное время, причем каждый снимок снабжен служебной сопровождающей информацией (ССИ), где имеются лишь неточные и/или редкие измерения параметров
P r движения ЦМ КА. Рассматривается задача приведения космических снимков, полученных при таких распределенных сканирующих съемках, к единому масштабу. При этом второй снимок условно считается основным, именно в его масштаб пересчитывается масштаб первого снимка. Разработанный метод содержит четыре последовательно выполняемых этапа:
-
1. восстановление характеристик пространственного движения КА при сканирующей съемке и получении каждого снимка, используя методы уточнения параметров p r, p a на основе комплексной обработки снимков совместно с ССИ [5], [7-9];
-
2. пересчет пикселей первого снимка на поверхность ОЗЭ с применением ССИ и уточненных характеристик движения;
-
3. пересчет сетки пикселей второго снимка на поверхность ОЗЭ;
-
4. формирование первого снимка в масштабе второго снимка.
УТОЧНЕНИЕ ДВИЖЕНИЯ КА ПРИ СЪЕМКЕ
Поступательное и угловое движения КА уточняются по опорным объектам, выбранным на паре снимков, с использованием сведений об элементах внутреннего рv и внешнего рr, pa ориентирования съемочной аппаратуры. Уточнение движения центра масс КА выполняется с привязкой к карте GOOGLE Earth. На этой карте выбираются опорные объекты, находящиеся на поверхности со средним превышения H , с ис пользованием параметров Pv находятся соот-
ветствующие объекты на снимках и вычисляются геодезические координаты (широта B и долгота L ) их расположения на поверхности ОЗЭ. По разности координат опорных объектов на карте и полученных по результатам таких вычислений определяется средняя поправка к параметрам p r движения ЦМ КА, оптимальная по методу наименьших квадратов.
Для уточнения углового движения КА, телескоп которого оснащен более чем одной линейкой ОЭП, эффективно применение методики [5,7]. Если же имеется лишь одна линейка матриц ОЭП с зонами перекрытия, то используется методика, основанная на последовательном уточнении значений вектора угловой скорости и кватерниона ориентации КА. Такое уточнение выполняется по информации о продольных S y и поперечных S Z сдвигах изображения на ОЭП (в плоскости y v Ov z v ВСК) с использованием метода функционализации [3]. Согласно разработанной методики [9] сначала для известных по ССИ временных интервалов сканирующей съемки выполняется перерасчет движения ЦМ КА для рассматриваемой пары снимков с вычислением соответствующих новых начальных условий. В результате получаются массивы значений радиус-векторов r*"( tk ), k e N K . (0,1,...K) и r 02) ( t m ), m e N “ , а также скоростей поступательного движения v on ( t k ), k e N K и v 02) ( t m ), m e N M , центра масс КА на интервалах времени маршрутов получения первого и второго снимков, соответственно. Далее для каждого снимка определяется фактическая угловая скорость КА при сканирующей съемке. Компоненты СДИ в зонах перекрытия матриц ОЭП и сдвиги изображения связаны соотношениями
Vsv = (Sy + p) rh «-V;
, (3)
V sz = S sz rh « V sz , s = 1 - ( n - 1) где h – частота переноса зарядов по столбцам, r – размер пикселя, p – расстояние между рядами матриц, n – число матриц в линейке ОЭП. Массив значений кватерниона ориентации КА в составе ССИ соответствующего снимка проходит компьютерную обработку с исключением некорректных данных, фильтрацией шумов измерений и далее используется для формирования массивов значений дальности D , матрицы C = | ~ j | ориентации ТСК относительно ГСК и вектора скорости v s поступательного движения ТСК относительно ГГСК по скорректированным параметрам p r движения ЦМ КА. Для s -ой точки изображения первого снимка в момент времени t k , k e N K , формула (2) представляется уравнением a s © e ( t k ) = ь s , где искомый вектор-столбец © s ( tk ) = { to s, ( tk )} , а известные с учетом вычис-
лений компонентов СДИ по формуле (3) матрица
A и столбец b имеют явный вид ss
A s
b s
^^^^^^^в
~
~ j
~.-
~i~i ysizsi
^^^^^^^в
(1 + (~ s )2)
1 + (~ )2
. V y ( y , ^)
~ -
V Z (~ s ,~)
— q
^^^^^^^^
~i~i ysizsi
~ - ~ s
~ s
• V v,+v' ,- ys * el * t
e2
;
s
~ i r— c r— c
Z * v e s 1 + v s 3
для s = 1 - ( n - 1) . Далее набор таких n - 1 уравнений разрешается относительно вектора © ss ( t k ) по методу наименьших квадратов, в результате получается оценка toX t k ) = A # B . ( A ‘ A ) - 1 A t B , где составные матрицы A = { A 1 , A 2,... A n - 1 } и B . { b 1 , b 2,... b n - 1 } . Расчет значений указанной оценки выполняется для моментов времени маршрута, соответствующих последовательности строк снимка, с первой строки до конечной с заданным шагом. В результате получается массив оценок вектора угловой скорости ct) s ( t k ) , k e N K . Аналогичным способом формируется массив оценок вектора угловой скорости © e ( t m ) , m e N M при выполнении маршрута съемки, соответствующего второму снимку. Полученные оценки после фильтрации и высокоточной сплайновой аппроксимации применяются для уточнения фактической ориентации каждой строки изображения в матрицах ОЭП с помощью численного интегрирования соответствующего кватернионного уравнения. В результате выполнения данного важного этапа получаются уточненные значения положения и угловой ориентации телескопной системы координат при съемке.
ПЕРЕСЧЕТ МАСШТАБА СНИМКОВ
Схема пересчета масштабов представлена на рис. 2 а , где используются массивы информации I q и оси координат X q = y ^ , yq = z v ( q = 1,2 ) снимков. По скорректированным значениям параметров p r и p a движения ТСКдля t = t k каждый пиксель первого снимка ( q = 1 ) проектируется на поверхность ОЗЭ с учетом среднего превышению местности. В результате для каждого пикселя, расположенного на пересечении i- ой строки и j -го столбца первого снимка получается массив данных ( L 1 , B 1 , J 1 , r 1 ) ^ , - = 1 - n 1 , j = 1 - m 1 , где использовано обозначение яркости J 1 пикселя этого снимка. Аналогично выполняется пересчет координат сетки пикселей второго снимка на поверхность ОЗЭ с формированием массива данных ( L 2 , B 2 , r 2 ) j , - = 1 - n 2, j = 1 - m 2 , где - и j - номера строки и столбца на «заготовке» первого снимка в масштабе второго снимка. При этом ширина линейки матриц ОЭП в ФП телескопа, соответствующего второму снимку, формально может быть увеличена для захвата всей площади первого снимка.
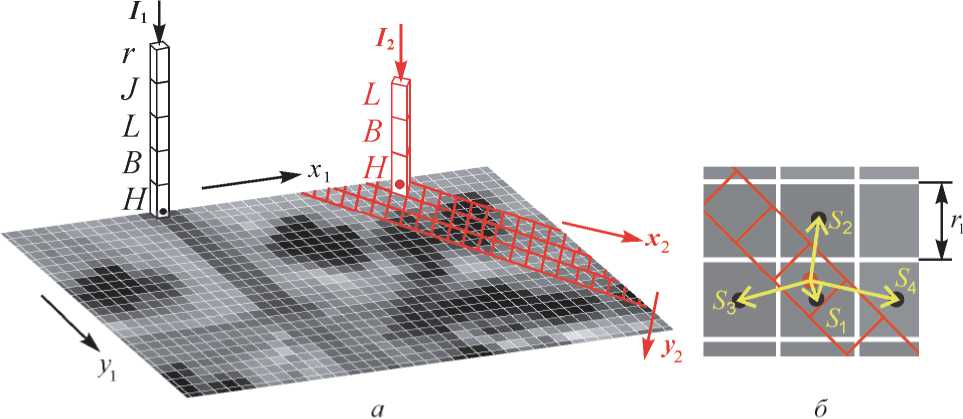
Рис. 2. Схема пересчета масштаба снимков
На завершающем этапе первый снимок формируется в масштабе второго снимка. При этом для каждого пикселя на пересечении i -ой строки и j -го столбца второго снимка устанавливается яркость J *j = Z k (1 - S k I r 1 ) J 1 k , где J 1 k - значения яркостей ближайших пикселей первого снимка, расстояния S k до ближайших центров которых удовлетворяют условию S k < r 1 , см. рис. 2 б .
РЕЗУЛЬТАТЫ ЧИСЛЕННЫХ РАСЧЕТОВ
На рис. 3 представлен снимок, составленный из фрагментов, которые были получены в разное время с различными условиями по высоте полета
КА и ракурсу. На рис. 4 показан фрагмент шва этого снимка, на котором заметно, что его составные части получены при различных высотах Солнца над горизонтом, что отражается в различных направлениях тени. Указанные исходные снимки были сформированы в различное время с различных высот полета КА ( h 1 = 464 км, h 2 = 368 км) и при различных углах крена ( у 1 = - 3 o , у 2 =+ 10 o ) трассовой сканирующей съемки
ЗАКЛЮЧЕНИЕ
Предложен метод приведения космических снимков, полученных при распределенных сканирующих съемках, к единому масштабу. Данный
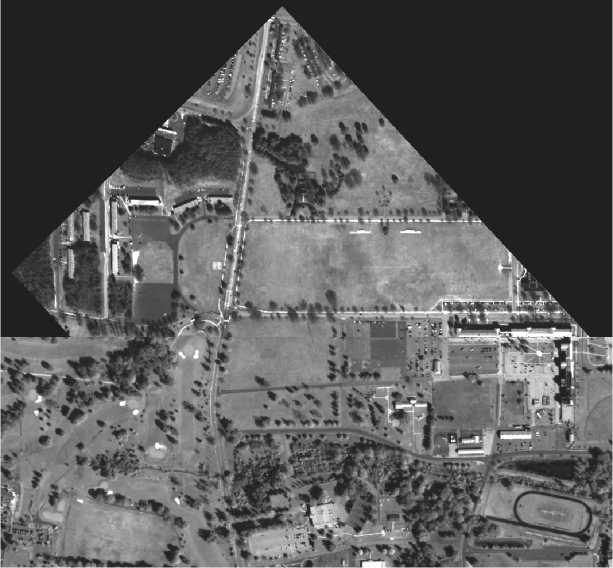
Рис. 3. Пример составного снимка
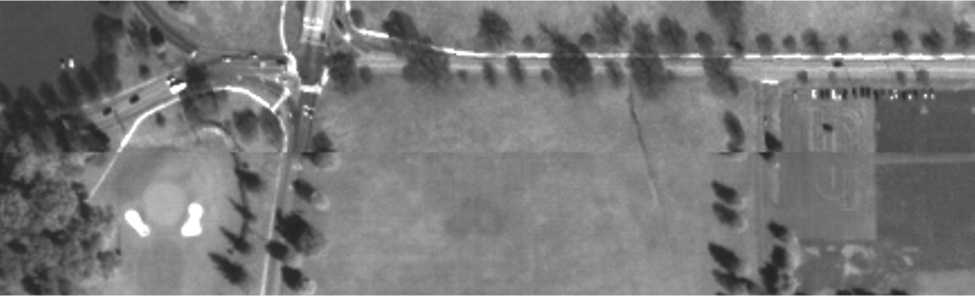
Рис. 4. Фрагмент шва составного снимка
метод не использует процедуру ортонормирования и может применяться для обработки снимков наземных местностей с небольшим перепадом высот, либо в случае, когда не предъявляются высокие требования к их измерительным свойствам. Представлены численные результаты, демонстрирующие работоспособность предложенного метода преобразования масштабов.
Список литературы Метод преобразования космических снимков, полученных при сканирующих оптико-электронных съемках
- Воронин Е.Г. Технология фотограмметрической обработки космических снимков, имеющих перекрытия//Вестник ФГУП НПО им. С.А.Лавочкина. 2012. №2, С. 23-27.
- Воронин Е.Г. Технология фотограмметрической обработки космических снимков, имеющих перекрытия//Вестник ФГУП НПО им. С.А.Лавочкина. 2012. №2, С. 23-27.
- Воронин Е.Г. Технология фотограмметрической обработки космических снимков, имеющих перекрытия//Вестник ФГУП НПО им. С.А.Лавочкина. 2012. №2, С. 23-27.
- Гомозов О.А., Кузнецов А.Е., Побаруев В.И., Пошехонов В.И. Программно-математическое обеспечение системы космических стереоизображений//Вестник РГРТУ. 2009. № 1 (27). С. 17-22
- Гомозов О.А., Кузнецов А.Е., Побаруев В.И., Пошехонов В.И. Программно-математическое обеспечение системы космических стереоизображений//Вестник РГРТУ. 2009. № 1 (27). С. 17-22
- Гомозов О.А., Кузнецов А.Е., Побаруев В.И., Пошехонов В.И. Программно-математическое обеспечение системы космических стереоизображений//Вестник РГРТУ. 2009. № 1 (27). С. 17-22
- Кузнецов П.К., Мартемьянов Б.В., Семавин В.И., Чекотило Е.Ю. Метод определения вектора скорости движения подстилающей поверхности//Вестник СамГТУ, сер. «Технические науки». 2008. № 2(22). С. 96-110.
- Кузнецов П.К., Мартемьянов Б.В., Семавин В.И., Чекотило Е.Ю. Метод определения вектора скорости движения подстилающей поверхности//Вестник СамГТУ, сер. «Технические науки». 2008. № 2(22). С. 96-110.
- Кузнецов П.К., Мартемьянов Б.В., Семавин В.И., Чекотило Е.Ю. Метод определения вектора скорости движения подстилающей поверхности//Вестник СамГТУ, сер. «Технические науки». 2008. № 2(22). С. 96-110.
- Родионов Б.Н. Динамическая фотограмметрия. М.: Недра. 1983.
- Родионов Б.Н. Динамическая фотограмметрия. М.: Недра. 1983.
- Родионов Б.Н. Динамическая фотограмметрия. М.: Недра. 1983.
- Сомов Е.И., Бутырин С.А. Технология обработки сопровождающей измерительной информации для высокоточной координатной привязки космических снимков//Известия Самарского научного центра РАН. 2009. Т. 11. № 5. С. 156-163.
- Сомов Е.И., Бутырин С.А. Технология обработки сопровождающей измерительной информации для высокоточной координатной привязки космических снимков//Известия Самарского научного центра РАН. 2009. Т. 11. № 5. С. 156-163.
- Сомов Е.И., Бутырин С.А. Технология обработки сопровождающей измерительной информации для высокоточной координатной привязки космических снимков//Известия Самарского научного центра РАН. 2009. Т. 11. № 5. С. 156-163.
- Сомов Е.И., Бутырин С.А. Геодезическая привязка космических изображений на основе комплексирования навигационной и наблюдательной информации//Материалы XVIII Санкт-Петербургской международной конференции по интегрированным навигационным системам. Санкт Петербург: ГНЦ РФ «Концерн “ЦНИИ Электроприбор“». 2011. С. 264-266.
- Сомов Е.И., Бутырин С.А. Геодезическая привязка космических изображений на основе комплексирования навигационной и наблюдательной информации//Материалы XVIII Санкт-Петербургской международной конференции по интегрированным навигационным системам. Санкт Петербург: ГНЦ РФ «Концерн “ЦНИИ Электроприбор“». 2011. С. 264-266.
- Сомов Е.И., Бутырин С.А. Геодезическая привязка космических изображений на основе комплексирования навигационной и наблюдательной информации//Материалы XVIII Санкт-Петербургской международной конференции по интегрированным навигационным системам. Санкт Петербург: ГНЦ РФ «Концерн “ЦНИИ Электроприбор“». 2011. С. 264-266.
- Сомов Е.И., Бутырин С.А. Комплексирование наблюдательной и навигационной информации для верификации работы системы управления спутника и улучшения измерительных свойств космических снимков//Механика, управление и информатика. 2012. № 8. С. 138-142.
- Сомов Е.И., Бутырин С.А. Комплексирование наблюдательной и навигационной информации для верификации работы системы управления спутника и улучшения измерительных свойств космических снимков//Механика, управление и информатика. 2012. № 8. С. 138-142.
- Сомов Е.И., Бутырин С.А. Комплексирование наблюдательной и навигационной информации для верификации работы системы управления спутника и улучшения измерительных свойств космических снимков//Механика, управление и информатика. 2012. № 8. С. 138-142.
- Сомов Е. И., Бутырин С.А. Алгоритмы наведения и гиросилового управления ориентацией спутников землеобзора при сканирующей оптико-электронной съемке//Механика, управление и информатика. 2012. № 9 (9). С. 61-70.
- Сомов Е. И., Бутырин С.А. Алгоритмы наведения и гиросилового управления ориентацией спутников землеобзора при сканирующей оптико-электронной съемке//Механика, управление и информатика. 2012. № 9 (9). С. 61-70.
- Сомов Е. И., Бутырин С.А. Алгоритмы наведения и гиросилового управления ориентацией спутников землеобзора при сканирующей оптико-электронной съемке//Механика, управление и информатика. 2012. № 9 (9). С. 61-70.
- Бутырин С.А., Сомов Е.И. Метод преобразования масштабов космических снимков, полученных при пространственно распределенных сканирующих оптико-электронных съемках//Техническое зрение. 2013. № 1. С. 23-30.
- Бутырин С.А., Сомов Е.И. Метод преобразования масштабов космических снимков, полученных при пространственно распределенных сканирующих оптико-электронных съемках//Техническое зрение. 2013. № 1. С. 23-30.
- Бутырин С.А., Сомов Е.И. Метод преобразования масштабов космических снимков, полученных при пространственно распределенных сканирующих оптико-электронных съемках//Техническое зрение. 2013. № 1. С. 23-30.
