Метод прогнозирования изменений параметров временных рядов в цифровых информационно-управляющих системах

Автор: Кропотов Юрий Анатольевич, Проскуряков Александр Юрьевич, Белов Алексей Анатольевич
Журнал: Компьютерная оптика @computer-optics
Рубрика: Численные методы и анализ данных
Статья в выпуске: 6 т.42, 2018 года.
Бесплатный доступ
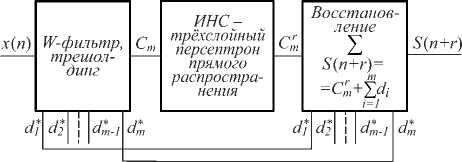
Прогнозирование изменений параметров временных рядов является актуальной задачей при мониторинге исследуемых процессов в цифровых информационных системах управления при исследовании проблем увеличения горизонта предсказания и минимизации погрешности прогноза. В работе исследуются алгоритмы прогноза, основанные на моделях, воспроизводящих динамику временного ряда в форме искусственных нейронных сетей. Получены уравнения функционирования и обучения искусственной нейронной сети в матричной форме, получен алгоритм обратной подстановки, с помощью которого можно увеличить глубину прогноза. В работе представлено решение задачи прогноза, состоящее в нахождении оценок предсказания посредством минимизации функции потерь - квадрата нормы отклонения оценок от наблюдаемых значений временного ряда и в определении коэффициентов модели алгоритмом обучения искусственных нейронных сетей итерационным методом обратного распространения ошибок. Применение разработанных алгоритмов позволило построить структурную схему реализации нейросетевого прогнозирования, с помощью которого можно получить достаточно точное представление об изменениях параметров временных рядов в системах мониторинга исследуемых процессов по критериям длительности и минимизированной погрешности получения прогноза.
Прогнозирование, информационные системы управления, функциональный ряд, нейронная сеть, временной ряд, трехслойный персептрон
Короткий адрес: https://sciup.org/140238461
IDR: 140238461 | DOI: 10.18287/2412-6179-2018-42-6-1093-1100
Method for forecasting changes in time series parameters in digital information management systems
Predicting changes in the parameters of time series is of high significance when monitoring the research processes in digital information management systems. This task also arises when researching the issues of increasing the prediction horizon and minimizing the forecast error. In this paper, we investigate prediction algorithms based on models that reproduce the dynamics of a time series in the form of artificial neural networks. We also consider the development of algorithms for control, functioning and training of an artificial neural network in a matrix form and obtaining an algorithm for the return substitution, with the help of which it is possible to obtain an increase in the depth of the forecast. The paper presents the solution of the prediction problem consisting in finding prediction estimates by minimizing the loss function - the square of the norm of estimate deviation from the observed values of the time series and in determining the model coefficients by using an artificial neural networks learning algorithm based on the iterative method of back-propagating errors. Application of the developed algorithms has allowed us to build a structural scheme for implementing neural network forecasting, with the help of which it is possible to obtain a fairly accurate representation of changes in the parameters of time series in the process monitoring systems in terms of the runtime and the minimized error of the forecasting.
Текст научной статьи Метод прогнозирования изменений параметров временных рядов в цифровых информационно-управляющих системах
Задача прогнозирования заключается в нахождении будущих значений параметров временного ряда на интервале, называемом горизонтом прогнозирования [1, 2], в пределах которого обеспечивается необходимая точность решения задачи. Для непрерывных процессов это интервал ( t, t + t ], который для временного ряда записывается как ( n, n + А ]. Здесь t и nT - текущие моменты времени, при этом T - период дискретизации. Прогнозирование обычно осуществляется по значениям временного ряда или процесса на конечном, предшествующем, интервале [ t - T, t ] времени.
Горизонт предсказания является не только одной из важнейших мер качества прогноза, но и используется в качестве критерия степени детерминированности и случайности наблюдаемых явлений, служит характеристикой динамического хаоса (характеристикой хаотических колебаний в динамических системах). В основе этого утверждения лежит зависимость горизонта предсказания не только от используемых алгоритмов, но и от свойств анализируемых временных рядов и процессов. В задачах прогнозирования выбор алгоритма осуществляется исходя из соображений максимизации горизонта прогнозирования и достоверности прогноза. Один из принципов прогнозирования временных рядов или процессов основывается на их представлении непрерывными или дискретными моделями. В работах [1,
-
2 ] модель прогнозируемого процесса схематически описывается дифференциальным уравнением, зависящим от неизвестных параметров системы a и факторов f k , отражающих неопределённость модели, где k – номер анализируемого фактора, находится в пределах 1 < k < M и идентифицируется методом наименьших квадратов. При этом в рассмотрение вводятся три процесса: наблюдаемый процесс y , исследуемый процесс x и модельный (прогностический) процесс z . Исследуемый процесс в силу неопределенности факторов f k является (из множества возможных) неизвестным решением дифференциального уравнения
P (d/d t , x , a , fk ) = 0.
Пренебрежение указанными факторами позволяет получить дифференциальное уравнение, описывающее модельный процесс z , при соответствующих условиях близкий к исследуемому процессу x . Это уравнение можно записать в виде
G (d/d t , z , a ) = 0.
Здесь критерием качества прогнозирования может являться среднеквадратическое значение нормы отклонения модельного процесса по факторам f k от исследуемого на интервале предсказания, то есть величина [1]
-
2\ 1 M t +T 2
-
( x - z ll / ,,^ J l x ( v , f k ) - z ( v )l d v . (1)
M k = i t
Аналогично определяется качество прогнозирования дискретных процессов или временных рядов, представленных дискретными моделями, которые, в частности, могут быть получены из непрерывных моделей путём замены производных конечными разностями. При этом операция интегрирования заменяется операцией суммирования по конечному множеству данных на интервале прогнозирования. Переход к дискретной модели эквивалентен численному решению дифференциального уравнения со свойственными этому решению проблемами чувствительности к возмущающим воздействиям.
На практике построение моделей основывается на данных о соответствующих наблюдаемых процессах: модели могут относиться к классам линейных дискретных и регрессионных систем, стационарных и нестационарных процессов. При решении задач прогнозирования нестационарных процессов может быть применен метод, основанный на декомпозиции процессов по эмпирическим модам (метод EMD) [5].
Распространенными методами прогнозирования являются параметрические методы регрессионной аппроксимации [4], динамические модели авторегрессии – скользящего среднего [3], методы импульсных функций [6] и искусственных нейронных сетей [9, 10].
1. Нейросетевые методы прогнозирования
Горизонт прогнозирования любой модели зависит от того, насколько достоверно эта модель воспроизводит динамику временного ряда или системы, порождающей наблюдаемый процесс. Поэтому в этой части работы исследуется вопрос о горизонте прогнозирования на основе модели искусственной нейронной сети [7, 8]. Проблема здесь заключается в том, насколько точно динамика процесса может быть представлена весовыми коэффициентами сети. Поэтому обратные связи формируются алгоритмами обучения методом обратного распространения ошибки. Алгоритм функционирования многослойной нейронной сети прямого распространения при прохождении сигналов по направлению от входа к выходу задаются уравнениями в матричной форме. Соответственно, схема нейронной сети представлена на рис. 1.
В соответствии с рис. 1 вектор выходов j- го слоя сети, состоящего из p j нейронов,
У/=(Ул,У12",yj,pjT , (2) и вектор весовых коэффициентов l-го нейрона j-го слоя сети wjl =( wj, 1, wj 2, -, wj, pj) T . (3)
Тогда синаптическая сумма l-го нейрона j-го слоя сети sj,l = wjj yj-1 + wj,l,0 , (4) где wj,l,0 – смещение нейрона.
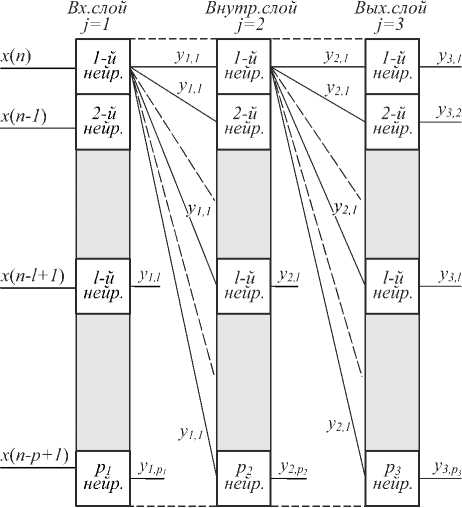
Рис. 1. Структура трехслойной нейронной сети обратного распространения ошибки
При этом выходы j-го слоя сети можно представить вектором yj =
' Q ( w T лУн
Q ( w T2 y j - i
vQ ( w T , p j y j - i
+ j o )
+ wj 2 o )
+ wj.P, 0) ,
где ф ( - ) - функция активации.
Формула (5) является рекуррентным уравнением, позволяющим найти последовательно выходы всех слоёв сети, начиная с первого слоя (j' = 1) и заканчивая последним слоем (в рассматриваемом случае j =3), совпадающим с выходом сети. Вектор y 0 – это входная последовательность временного ряда x ( n ).
При решении задач прогноза выходами сети в пределах одного цикла её функционирования являются результаты предсказания временного ряда или процесса на заданное число шагов вперёд, начиная с 1 и кончая p вых.сл . (число нейронов в выходном слое сети).
Алгоритм обучения нейронной сети методом обратного распространения ошибки также можно представить уравнениями в матричной форме.
Введём матрицу весов j -го слоя сети
Wj=( wjl, wj^V", wj. Pj) , вектор смещения нейронов j-го слоя wjo =(wjio, wj.2.0,", wj,pj,o )T , вектор синаптических сумм sj=(sj,1, sj2,", sj, P,) T и векторную функцию активации j-го слоя
Ф(s j ) = (ф(sj,1), Ф(sj,2 ),", Ф(sj,Pj ))T .
Задача обучения сети заключается в нахождении весовых коэффициентов j- го слоя сети путем минимизации функционала
p j P j 2
—=Е e- = Е( yj - y-) = l=1 l=1
= ( v ( s j ) - y j ) T ( ф ( s j ) - y j ) ,
ной ряд x ( n ) отсчетов значений процесса. Аналогично могут быть исследованы непрерывные функции либо временные ряды данных, отображающие информацию изменения параметров различных процессов для решения задач прогнозирования в информационно-управляющих системах.
Табл. 1. Алгоритм обучения многослойного персептрона
где e - = v ( to jl y j - + to j 0 l ) - y l или соответственно e jl = ф (s j l ) - y j - вектор ошибок по выходам j- го слоя, У j = ( У 1 , У - ,2 , ^ , У ,,p j ) T — вектор требуемых выходов j -
го слоя сети.
Если ввести матрицы W j =d s T / d y j - 1, диагональную матрицу Ф j = 5ф T ( s j )/ d s j в виде
5ф т ( s j ) d s -
=diag
дф ( S j ,1 )
&- ,1
дф ( s j ,2 )
&- ,2
. 5ф ( s - j
’ d s- , Pj .
,(11)
то алгоритм обучения методом обратного распространения ошибки принимает вид разностного уравнения
e - — 1 = W j ф - e - ,
с начальными условиями e j = ф ( s j ) - y j , при j =j вых.сл. (номер выходного слоя сети).
Коррекция весовых коэффициентов сети по ошибкам, полученным с помощью уравнения (12), осуществляется градиентным методом по итерационным формулам wj.i(q+1) = wj, 1(q)- а hj, 1(sj, 1) ej, 1 у j-1,
|
Этап обучения |
Шаги алгоритма |
||
|
1. Определение выходов (прямой проход) |
У - = |
Г ф ( w T 1 У - - 1 + W 01 ) ^ ф ( w T 2 у - - 1 + w 02 ) vф ( w Tp y j - 1 + w jp ) j |
, - = 1,2,...; y 0 = C „ |
|
2. Определение ошибок (обратный проход) |
e j - 1 = W j ® j e J , e - = Ф ( S j ) - У - , s j = W ^ У ) ! + w ) 0 = ( s - 0 , S - 2 ,..., s jp j ) T , где wj = ( w - 1 , w - 2 ,., w -p- ) - матрица весовых синаптических коэффициентов. |
||
|
3. Коррекция синаптических коэффициентов |
w j ( q + 1) = wH ( q ) - a h l ( s jl ) e -— , — q + 1) = w - 0 ( q ) -а Ф , e - , ,. .дф ( s -1 ) дф < s -- 2 ) 5(P ( S p X. дф T ( s j ) Ф , = diag (---- j--j—... -----—) =----- j—, d s,, d s,2 d s,„ d s, J ,1 j , 2 j , p j j j дф ( s jl ) h jl ( s jl ) = „ , d s jl a - шаг настройки, выбирается в диапазоне 0< a < 1 . |
||
w - ,0 ( q + 1) = w - ,0 ( q ) — а Ф - e j ,

Список литературы Метод прогнозирования изменений параметров временных рядов в цифровых информационно-управляющих системах
- Кравцов, Ю.А. Случайность, детерминированность, предсказуемость/Ю.Н. Кравцов//Успехи физических наук. -1989. -Т. 158, № 1. -С. 93-122. - DOI: 10.3367/UFNr.0158.198905c.0093
- Ермолаев, В.А. О методах прогнозирования временных рядов и непрерывных процессов/В.А. Ермолаев//Радиотехнические и телекоммуникационные системы. -2016. -Вып. 2. -С. 52-63.
- Бокс, Дж. Анализ временных рядов. Прогноз и управление/Дж. Бокс, Г. Дженкинс. -М.: Мир, 1974. -408 c.
- Маевский, В.В. Робастность регрессионного прогнозирования при наличии функциональных искажений модели/В.В. Маевский, Ю.С. Харин//Автоматика и телемеханика. -2012. -Вып. 11. -С. 118-137.
- Huang, N.E. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis/N.E. Huang, Z. Shen, S.R. Long, M.C. Wu, H.H. Shin, O. Zheng, N.C. Yen, C.C. Tung, H.H. Liu//Royal Society of London Proceedings Series A. -1998. -Vol. 454, Issue 1971. -P. 903-998. - DOI: 10.1098/rspa.1998.0193
- Дремин, И.М. Вейвлеты и их использование/И.М. Дремин, О.В. Иванов, В.А. Нечитайло//Успехи физических наук. -2001. -Т. 17, № 5. -C. 465-501. - DOI: 10.3367/UFNr.0171.200105a.0465
- Проскуряков, А.Ю. Алгоритмы автоматизированных систем экологического мониторинга промышленных производств: монография./А.Ю. Проскуряков, А.А. Белов, Ю.А. Кропотов. -Москва-Берлин: Директ-Медиа, 2015. -121 с. -ISBN: 978-5-4475-5245-9.
- Пат. 2600099 Российская Федерация G 06 Q 10/04, G 06 N 3/02. Способ нейросетевого прогнозирования изменения значений функции c её предварительной вейвлет-обработкой и устройство его осуществления/Белов А.А., Ермолаев В.А., Кропотов Ю.А., Проскуряков А.Ю.; 2015110284/08, заявл. 23.03.2015, опубл. 20.10.2016, Бюл. № 29.
- Allende, H. Artificial neural networks in time series forecasting: a comparative analysis/H. Allende, C. Moraga, R. Salas//Kybernetika. -2002. -Vol. 38, No 6. -P. 685-707.
- Zhang, G. Forecasting with artificial neural networks: The state of the art/G. Zhang, B.E. Patuwo, M.Y. Hu//International Journal of Forecasting. -1998. -Vol. 14, Issue 1. -P. 35-62. - DOI: 10.1016/S0169-2070(97)00044-7
