Метод радиально-базисных нейронных сетей для решения задачи обратной кинематики многозвенных манипуляторов

Автор: Полещук Ф.А., Соколов С.В.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Механика
Статья в выпуске: 1 (69) т.18, 2026 года.
Бесплатный доступ
Рассматривается универсальный метод решения задачи обратной кинематики робототехнических манипуляторов с помощью радиально-базисной нейронной сети (RBFN). В отличие от аналитических и итеративных численных алгоритмов, RBFN стабильна в сингулярных конфигурациях и обеспечивает постоянное время инференса. Методика включает генерацию обучающей выборки прямой кинематикой, нормализацию данных, выбор центров базисных функций (случайный поднабор или кластеризация К-Means) и обучение линейного выходного слоя стохастическим градиентным спуском. Подчёркивается независимость подхода от конкретной кинематики и возможность масштабирования к системам произвольного числа степеней свободы.
Обратная кинематика, радиально-базисная сеть, многозвенный манипулятор, машинное обучение, робототехника
Короткий адрес: https://sciup.org/142247869
IDR: 142247869 | УДК: 004.896
Radial basis function neural network method for solving the inverse kinematics of multi-joint manipulators
A general technique for solving the inverse kinematics (IK) problem of robotic manipulators using a radial basis function neural network (RBFN) is presented. Unlike analytical or iterative numerical algorithms, an RBFN provides a constant inference time and remains stable near kinematic singularities. The workflow comprises dataset generation via forward kinematics, data normalisation, centre selection (random subset or K-Means clustering) and linear output-layer training with stochastic gradient descent. The method is agnostic to the particular robot geometry and scales to manipulators with any number of degrees of freedom.
Текст научной статьи Метод радиально-базисных нейронных сетей для решения задачи обратной кинематики многозвенных манипуляторов
Задача обратной кинематики (IK) состоит в восстановлении вектора суставных координат по заданной позе рабочего органа. Традиционные аналитические схемы требуют специального вывода для каждой конфигурации, а итеративные численные алгоритмы, основанные на Якобиане, расходуют переменное время вычислений и чувствительны к сингулярностям [1-3]. Радиально-базисная нейронная сеть (RBFN) предлагает альтернативу с фиксированной вычислительной сложностью и хорошими интерполяционными свойствами [4-6].
(с) Полещук Ф. А., Соколов С. В., 2026
2. Связанные исследования3. Предлагаемый метод
3.1. Постановка задачи
3.2. Архитектура RBFN
@ Федеральное государственное автономное образовательное учреждение высшего образования «Московский физико-технический институт (национальный исследовательский университет)», 2026
Современные работы решают задачу IK либо усложнением аналитики, либо ускорением итеративных методов на GPU, либо применением нейросетей (MLP, трансформеры и др.) [1]. Болвшинство нейросетевых подходов игнорирует структуру данных при выборе центров базисных функций, что ведёт к избыточным моделям. Предлагаемый метод устраняет этот недостаток.
Дополнительно отметим, что при наличии многозначности решения IK полезны схемы разбиения на локальные режимы (mode gating) [7].
Пусть прямая кинематика описывается отображением ж = /(0) = [рт, ■Г € R6, (1)
где р и ty — положение и ориентация схвата. Цель — построить аппроксимацию обратного отображения д : R6 ^ R”.
Для задания ориентации у могут использоваться различные параметризации; выбор метрики для сравнения ориентаций обсуждается в [8]. Для кватернионной кинематики и ошибок ориентации см. [9].
Скрытый слой насчитывает m гауссовых функций tKx) = exp 1-Й U
-
),
i = 1,... ,m, (2)
а выход сети формируется линейно:
0 = Wy(x) + b.
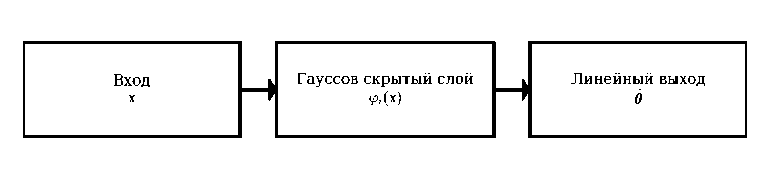
Рис. 1. Блок-схема радиалыю-базиспой сети: входной вектор позы, гауссов скрытый слой и линейный выход
3.3. Выбор центров и обучение
Три стратегии выбора центров: регулярная сетка, K-Means [10,11], случайный поднабор. Последняя минимизирует вычислительные расходы при сохранении репрезентативности. Обучение линейного слоя проводится оптимизатором Adam с функцией потерь MSE.
3.4. Алгоритм применения
1) Генерация обучающего набора (х,9).
2) Масштабирование данных.
3) Фиксация т центров.
4) Обучение W ii b.
•б ) Ипферепс 9 для нового х.
6) (Опционально) уточнение решения итеративной процедурой damped least squares (DLS) [1-3].
3.5. Ограничение области применимости (малая зона)
Практически важно подчеркнуть, что RBFN является интерполяционной моделью и даёт надёжные решения лишь внутри области, покрытой обучающими данными. Поэтому далее ограничим рабочую область малой зоной П.
Пусть задана опорная поза хо € R6 (например, точка рабочей траектории) и радиус R > 0. Определим малую зону как евклидов шар
П := B r (хо) = {х € R6 : ||х — Х0Ц2 С R}.
Метод инференса считается корректным для х € П; вне зоны возможна деградация качества из-за экстраполяции.
В прикладной реализации используется простой контроль принадлежности: если |х — хо|2 > R, т° (i) возвращается отказ либо (ii) выполняется проекция „ х — х0
х ^ хо + R-------т- и далее инференс выполняется для спроецированной позы.
|х — хо||2
3.6. Теоретическая гарантия аппроксимации
Мы формализуем и доказываем утверждение о том, что радиально-базисная сеть способна сколь угодно точно приближать отображение обратной кинематики на любом компактном подмножестве рабочего пространства. Классические результаты о приближении и интерполяции RBF приведены в [4-6].
Пусть П С R6 — компактная малая зона рабочего пространства, а д : П ^ 0 С R” — непрерывное отображение обратной кинематики. Для любого е > 0 существует радиальнобазисная сеть
9(х) = W^p(х) + b,
1|х — cd| i = 1,... ,т,
^i(х) = exp —р --^— с некоторым конечным числом центров т и единым параметром Р > 0, такая что sup 11д(х) — 9(х)\ < е. хеп 2
[Доказательство] 1. Равномерная непрерывность. Компактность П и непрерывность д дают равномерную непрерывность: V e/ 2 > 0 3 5 > 0 : |х — у\\2 <5 ^ ||д(х) — д(у)12< е/2.
2. Конечное покрытие. Положим г = 5/2. Существует конечное г-покрытие компакта шарами Br(ci),... ,Br(ст): тшikii а € П возьмём как центры RBF. Число т зависит .тишь от г и размерности d = 6: т = O(r~d) = О(е-й).
3. Выбор параметра р. Положим Р ф (2г)-2. Тогда для любых х € Br(о) имеем ^фх) ф е-1/4 > 0.77. а. для центров, удалённых не менее нем на. 2г. уже pj(х) С е-1 ^ 0.37. Значит, внутри шара доминирует «свой» гауссов нейрон.
4. Конструкция весов. Положим W = [д(с1)| ... |д(ст)], b = 0. То есть вес каждого нейрона равен вектору суставов в центре.
5. Оценка ошибки. Для произвольного х G И выберем k с х G Br(ck). Тогда
6. Итог. Мы явным образом задали т, единый ^ и веса (W, Ь), для которых выполняется неравенство, тем самым лемма доказана.
4. Экспериментальная валидация
1|д(х) - 0(х)^ < ||д(х) - g(ck )|| + ||g(ck) - ^(х)^ .
2 :=Е2
Первое слагаемое < е/2 по вьi6opy г. Для второго: 6(х) есть взвешенное среднее значений g(cj), причём вес ^Дх) не менее чем вдвое выше любого «чужого» ^j. Из равномерной непрерывности следует Е2 < е/2. Суммируя, получаем требуемое е-ограничение.
Замечание. Оценка т = O(e~d) cd = 6 совпадает с классическим результатом о мощности е-покрытия.
Для демонстрации применимости метода использован манипулятор KUKA KR200/2 с шестью степенями свободы. Обучающая выборка сгенерирована прямой кинематикой на равномерной сетке ~ 3, 000 точек рабочего пространства. На рис. 2 показано распределение целевых поз и случайно выбранных центров RBF.
После 1, 000 эпох обучения кривая снижения ошибки стабилизируется (рис. 3). Полученные результаты подтверждают, что предлагаемая сеть достигает субмиллирадной точности без роста глубины модели и демонстрирует стабильную работу вблизи сингулярностей.
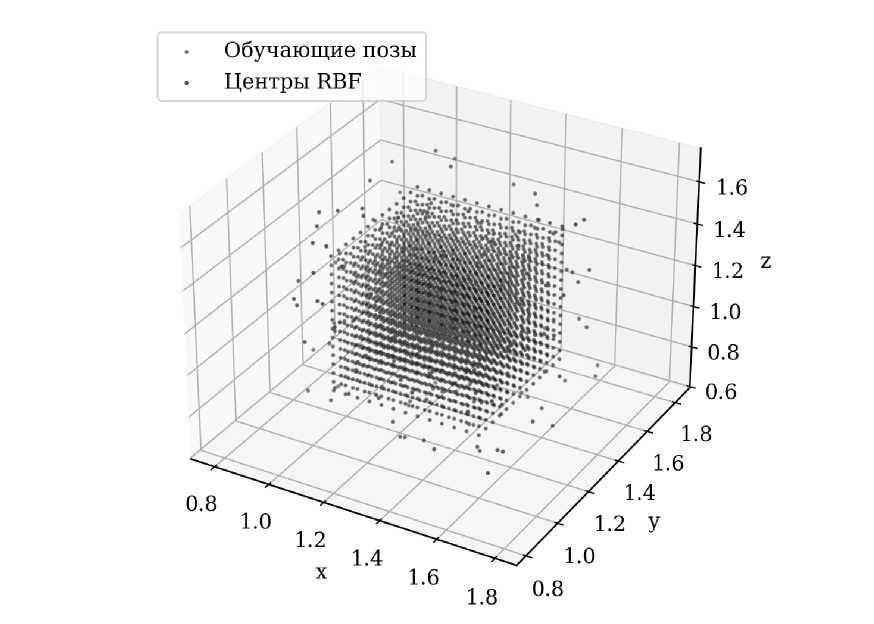
Рис. 2. Облако обучающих поз (серый цвет) и выделенные центры RBF (красный)
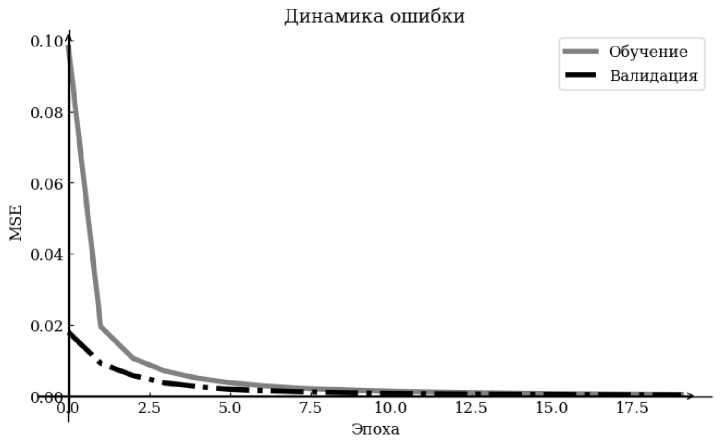
Рис. 3. Процесс обучения: среднеквадратичная ошибка (MSE) па обучающей и валидациоппой выборках
5. Потенциальные приложения
1) Высокоскоростные промышленные роботы.
2) Коллаборативные манипуляторы.
3) Медицинские роботизированные системы.
4) Мобильные платформы с ограниченным энергопотреблением.
6. Заключение
Метод RBFN для обратной кинематики объединяет компактную архитектуру, простую процедуру выбора центров и устойчивое обучение. Подход независим от конфигурации и числа степеней свободы манипулятора и открывает направления для исследований локальных ансамблей сетей.
