Метод расчета радиальной электромагнитной опоры турбомолекулярного вакуумного насоса

Автор: Гайбатов Р.С.
Журнал: Теория и практика современной науки @modern-j
Рубрика: Основной раздел
Статья в выпуске: 6 (36), 2018 года.
Бесплатный доступ
Магнитные подшипники все чаще используются в различных областях промышленности. Их уникальные особенности делают их привлекательными для решения проблем подвеса ротора и позволяют найти новые подходы в проектировании вращающихся узлов машин. Турбомолекулярные вакуумные насосы(ТМН) работают при высоких частотах вращения вала и применяются в высоковакуумных системах, что подтверждает актуальность применения магнитных подшипников в ТМН. В настоящей статье приведен метода расчета радиальной электромагнитной опоры ТМН, представлены графические зависимости основных характеристик подшипника.
Электромагнитная опора, турбомолекулярный вакуумный насос, метод расчета, бесконтактный подвес
Короткий адрес: https://sciup.org/140273467
IDR: 140273467
Calculation method of a radial electromagnetic support of a turbomolecular vacuum pump
Magnetic bearings are increasingly used in various industries. Their unique features make them attractive for solving the problems of the rotor suspension and allow finding new approaches in the design of rotating machine components. Turbomolecular vacuum pumps (TMP) operate at high speeds of shaft and are used in high-vacuum systems, which confirms the relevance of the use of magnetic bearings in TMP. In this paper, the calculation method of the radial electromagnetic support of TMP, graphical dependences of the main bearing characteristics are presented.
Текст научной статьи Метод расчета радиальной электромагнитной опоры турбомолекулярного вакуумного насоса
Первоначально активные магнитные подшипники (АМП) были разработаны с целью преодоления недостатков обычных подшипников качения или скольжения. В исследовательских лабораториях они показали свою способность работать в вакууме без какой-либо смазки и с отсутствием загрязнений рабочего пространства, на высоких скоростях и с возможностью изменения жесткости и демпфирования в широких пределах. Первые примеры практического использования активных магнитных подвесов относятся к 40-м годам XX столетия. Они описаны в работах Д. Бимса [4] по созданию ультрацентрифуг и роторных вакуумметров, Д. Хризенгера [1] по подвеске моделей в аэродинамических трубах и О. Г. Кацнельсона и А. С. Эдельштейна [6] по созданию весоизмерительных приборов. Подробное описание конструктивных и схемных решений, использованных в перечисленных работах, приведено в [7]. Сегодня магнитные подшипники введены в промышленный мир как очень ценный элемент машины с рядом особенностей и широким диапазоном применений.
Расчет проводился по следующему алгоритму.
-
• Задается быстрота действия ТМН, род и температура откачиваемого газа.
-
• Рассчитываются геометрические параметры колеса ТМН. Определяется диаметр вала ТМН.
-
• Рассчитываются геометрические и силовые характеристики электромагнитной опоры.
Внешний диаметр колеса D2 определяется по методу, предложенному в [5]
D2 =
________ a I b + h IH ________ ( a I b + h IH ) • Ix - X-h IH • I2
где 5 max - максимальная быстрота откачки ТМН, T - температура откачиваемого газа, M - молярная масса откачиваемого газа, a/b -отношение ширины межлопаточного канала колеса ТМН к его длине, h/H -отношение толщины лопатки колеса ТМН к толщине колеса ТМН, X -отношение внутреннего диаметра лопаток колеса к внешнему, I , I -коэффициенты, зависящие от окружной скорости колеса, наиболее вероятной скорости движения молекул и отношения внутреннего диаметра лопаток колеса к внешнему.
Следовательно, диаметр вала ТМН
d = 4 • D (2)
где 4 - отношение диаметра колеса под вал к внешнему диаметру колеса.
Магнитная сила, действующая на элемент площади ферромагнитного тела dA в однородном магнитном поле с индукцией в зазоре B [8],
2 dF =---dA, 2Щ где ^ = 4п • 10-7 Гн/м - магнитная постоянная.
Отсюда следует, что электромагнит с плоским зазором создает тяговое усилие F = 0,4 • 10 6 B 2 A , или 40 Н/см2 при B = 1 T.
Тяговое усилие электромагнита, создаваемое, например, полюсами 1 и 2 (рис. 1), определяется интегральной суммой проекций элементарных сил на ось Ox
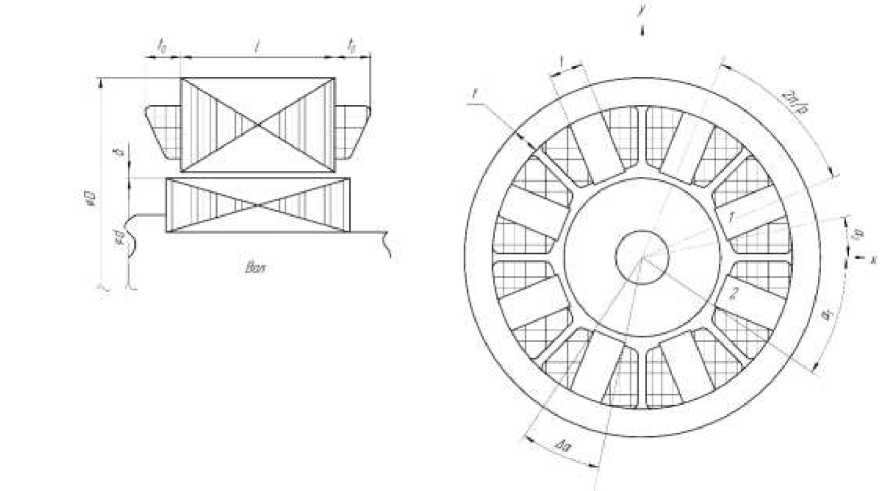
Рис. 1. Схема радиального подшипника. а - угол, отсчитываемый от оси Ox
|
B 2 ld F =-- 2 ^ 0 2 |
' а +А а а +А а ' J cos a d a + J cos a d a V а 1 а 2 7 |
Учитывая, что а = -22,5°-Аа /2, а2 = 22,5°-Аа /2, нетрудно установить ,что сумма интегралов в уравнении (4) приводится к виду 4 cos 22,5° sin(Aa /2) = 3,695 sin(Aa / 2). Аналогичным образом вычисляется тяговое усилие для АМП с числом полюсов p = 16,24,...,32. Обобщающая формула для тягового усилия радиального АМП принимает вид
„ B 2 paid . Аа
F = sin ,
2 ^ о 4 2
где a - коэффициент, зависящий от числа полюсов, a = 0,924 при p = 8, a = 0,906 при p = 16, a = 0,903 при p = 24 .
Поскольку полюсный угол Аа = t / (d /2) мал, можно положить sin(Aa /2) = t / d и привести выражение (3) к виду paltB2 F =------.
8 ^ 0
Чтобы найти удельное тяговое усилие на единицу площади диаметрального сечения цапфы f = F / id , нужно задаться шириной n d полюса t . Пусть полюс занимает половину полюсного деления, т.е. t = ---.
2 p
Тогда имеем f = F /(id) = 15,6aB2 Н/см2
В частном случае восьмиполюсного подшипника f = 14,4 B 2 Н/см2.
АМП, как и любой другой тип подшипника, должен обладать заданной несущей способностью F . Применительно к АМП под несущей способностью понимается максимальное тяговое усилие, которое может развиваться в течение длительного времени без перегрева обмотки. В ряде случаев статическая нагрузка на подшипник Q известна точно, в других случаях - приближенно. Однако всегда значение должно быть больше Q настолько, чтобы оставался запас для отработки динамических нагрузок. Также должна быть учтена возможность непредвиденных нагрузок. Обычно коэффициент запаса принимают равным Fmaх / Q = 2. Определяющим параметром при расчете геометрических характеристик подшипника является индукция в зазоре B. Она, в свою очередь, зависит от магнитных свойств используемой стали. В отличие от электрических машин, магнитное насыщение в АМП не допускается, поскольку оно вызывает потерю управляемости. Поэтому максимальное значение магнитной индукции в стали не должно превышать 1,4 Т для электротехнической стали и 1,8 Т - для кобальтовой стали [3]. Индукция в зазоре при этом будет на 10-15% меньше, чем в стали, из-за наличия потоков рассеяния и составлять 1,2 Т при использовании электротехнической стали и 1,6 Т - кобальтовой стали. Очевидно, что при индукции в зазоре B = Bmaх, подшипник должен развивать тяговое усилие, равное требуемой несущей способности F . Плотность тока в проводниках катушек при этом должна быть равна допустимому значению jmax .
Рассмотрим восьмиполюсный АМП и сформулируем задачу расчета его геометрии следующим образом. Пусть задан диаметр цапфы d и длина пакета l. Пусть также заданы зазор 3 и допустимая плотность тока jmах . Требуется найти внешний диаметр D и ширину полюса t, при которых тяговое усилие было бы максимальным, а индукция в зазоре при этом была бы равна B тах .
Индукцию в зазоре найдем из закона Ампера для магнитной цепи, по которому МДС, создаваемая катушками обоих полюсов, равна сумме падений магнитных напряжений в двух воздушных зазорах и в стали.
Магнитная цепь не насыщена, поэтому для простоты магнитным сопротивлением стали пренебрегаем. Тогда имеем jmax kcuA = — 28, ^0
где k - коэффициент заполнения площади паза А медью (ориентировочно kCu = 0,3^0,5) [2].
Площадь, занимаемая обмоткой в пазу
A =
Г D - d
V 2 2
— t
V nd
К 2
^
— t
Отсюда выражение для индукции в зазоре
B ( D , t ) = CB
r D — d
V 2 2
^
— t
r nd
V 2
^
— t
и выражение для тягового усилия
F ( D , t ) = C f C —
r D
V 2
d
л2
— t
r nd
V 2
— t t ,
где C и C - константы, определяемые соотношениями:
= M o k Cu j max . C = PaL
28 ’ F 8m '
Задача расчета геометрии подшипника математически сводится к задаче на условный экстремум: требуется найти максимум функции F(d, t) при дополнительном условии B (d, t) = Bmax, которое можно записать в виде уравнения
^ ( D , t )
(D - d
( 2 2
-
V nd t V 7k 2
^
- t
-
B max
CB
= 0.
Метод решения такой задачи хорошо известен. Формируем функцию
Ф (d , t ) = F (d , t ) + Хф^ ^ d, t ), где B = B max - множитель Лагранжа.
Неизвестные D и t находятся из совместного решения уравнения (11) и двух уравнений:
d Ф (D, t) =0 dD дФ ( D, t) --------= 0.
d t
Решение задачи дается соотношениями t = 0.392d - 0.885

D = 2 d - 0.546 1
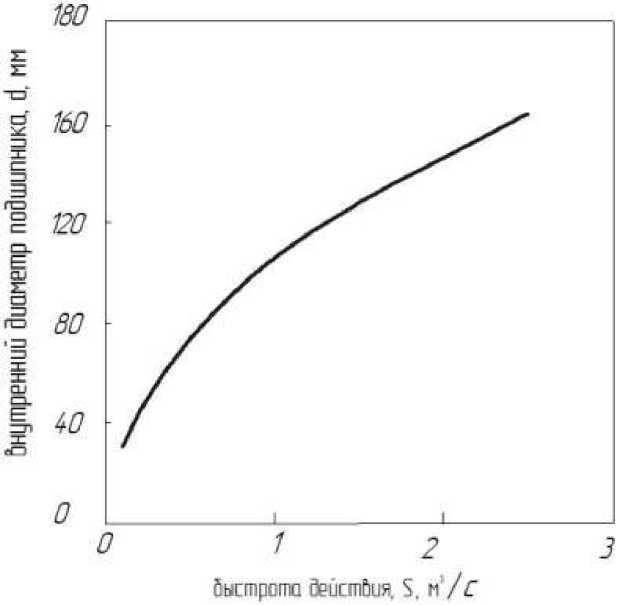
Рис.2. Зависимость внутреннего диаметра подшипника от быстроты действия насоса.
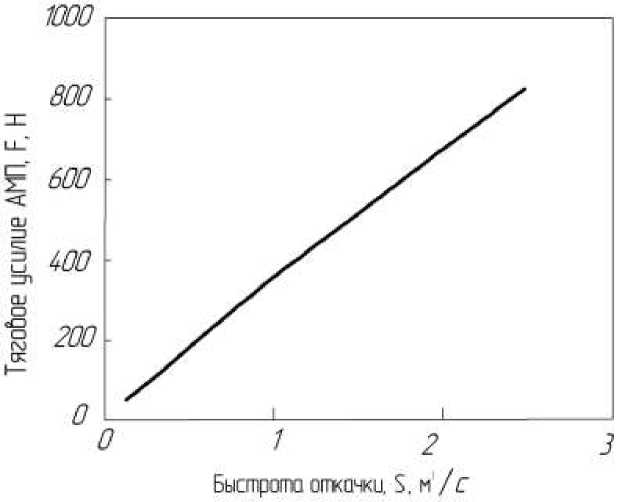
Рис.3. Зависимость максимального тягового усилия АМП от быстроты действия насоса
Видно, что в оптимальном подшипнике внутренний диаметр d должен быть немного больше половины наружного диаметра D . Ширина полюса t в зависимости от соотношения между выбранными значениями параметров Bma х, jmax и 5 может меняться в определенных пределах. Обычно эти параметры выбирают так, чтобы полюс занимал примерно половину полюсного деления, равного nd/8.
Требуемое значение несущей способности Fmax может быть достигнуто соответствующим выбором длины пакеты стали l . Продольный размер статора Iс = I + 2t0, где t0 = (7^- — t)/2 - длина лобовой части обмотки.
Список литературы Метод расчета радиальной электромагнитной опоры турбомолекулярного вакуумного насоса
- Chrisinger J. E. Magnetic suspension and balance system for wind tunnel application // Jorn. of Roy. Aeronaut. Soc. - 67. - 1963. - P. 717-724
- Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования [Текст] / В.А. Бесекерский, Е.П. Попов. - М.: Наука, 1975. - 768 с.
- Бессонов П. А. Теоретические основы электротехники [Текст] / П. А. Бессонов. - М.: Высш шк., 1973. - 752 с.
- Бимс Д., Спитцер Р., Уэйд К. Роторный вакуумметр с магнитным подвесом // Приборы для науч. Исслед. - 1962. - №2. - С. 3-7.
- Вакуумная техника [Текст]: справочник / К.Е. Демихов, Ю.В. Панфилов, Н.К. Никулин и др.; под ред. К.Е. Демихова. - М.: Машиностроение, 2009. - 590 с.
- Кацнельсон О. Г., Эдельштейн А. С. Автоматические измерительные приборы с магнитной подвеской. - М.: Энергия, 1970. - 216 с.
- Метлин В. Б. Магнитные и магнито-гидродинамические опоры. - М.: Энергия, 1968. - 190 с.
- Сикссмит Р. Электромагнитный подшипник // приборы для научных исследований. - 1961. - №11. - С. 30 - 32.
