Методические особенности решения задач по кинестатическому анализу рычажных механизмов

Автор: Кузнецов А.Ю., Поксараскин А.А.
Журнал: Огарёв-online @ogarev-online
Статья в выпуске: 14 т.3, 2015 года.
Бесплатный доступ
Рассматриваются особенности решения задач раздела «Кинетостатический анализ механизмов» дисциплины «Теория механизмов и машин». В обязательном блоке содержания этого раздела приводятся общие сведения по силовому расчету механизмов и алгоритм его реализации, а в процессуальном - пример силового расчета реального механизма.
Группы асура, кинетостатический анализ, принцип даламбера, принцип статической определимости
Короткий адрес: https://sciup.org/147248900
IDR: 147248900 | УДК: 37.022:001
Текст научной статьи Методические особенности решения задач по кинестатическому анализу рычажных механизмов
Кинетостатический анализ рычажных механизмов (кинетостатика) является одним из сложных разделов теории механизмов и машин и имеет своей целью определение реакций в кинематических парах для выполнения дальнейших расчетов на прочность. Для решения задачи обучения кинетостатике студентов при изучении дисциплины «Теория механизмов и машин» (ТММ) необходимо особое внимание уделять проектированию содержания этого раздела, особенно алгоритмизации выполнения такого анализа для кинематических цепей различного класса. Предлагаемая статья посвящена раскрытию этих вопросов на примере решения конкретной практико-ориентированной задачи.
В основном блоке [1; 6] содержания раздела приводятся общие сведения по кинетостатике. Следует отметить, что в основе кинетостатического анализа механизмов лежат два классических принципа общей механики [2; 4]: принцип Даламбера и принцип статической определимости. Применительно к механизмам принцип Даламбера формулируется следующим образом: если к звену, наряду с внешними силами, приложить силы инерции, и силы реакций в кинематических парах, то звено можно условно рассматривать находящимся в равновесии, и к нему применимы уравнения статики.
Принцип статической определимости заключается в равенстве количества неизвестных силовых параметров количеству возможных уравнений равновесия [5]. Для каждого звена плоской кинематической цепи можно составить три уравнения равновесия, следовательно, для всей цепи состоящей из n звеньев – 3n уравнений равновесия. В каждой кинематической паре 5-го класса при силовом расчете необходимо определить два параметра: для вращательной пары – величину и направление реакций; для поступательной пары – величину и точку приложения реакции. Для всей кинематической цепи общее количество неизвестных параметров будет равно 2р 5 . Условие статической определимости запишется как:
3n = 2P 5 (1)
Из уравнения (1) видим, что статически определимыми являются группы Асура [4], подвижность которых равна 0.
Учитывая вышеизложенное, составим алгоритм силового расчета механизма [4]: 1) вычерчивается в масштабе схема механизма в исследуемом положении; 2) определяются все внешние силы, приложенные к звеньям механизма, а также силы и моменты сил инерции; 3) проводится расчленение ведомой кинематической цепи на группы Асура; 4) расчет начинают с наиболее удаленной от ведущего звена группы, для чего ее изображают отдельно; 5) действие отсоединенных звеньев заменяют силами реакций; 6) в соответствующие точки звеньев прикладывают все действующие силы; 7) задачу обычно решают графоаналитическим методом, рассматривая равновесие группы находят искомые реакции, для чего составляются уравнения У F = 0; У M = 0. ; 8) на основании этих уравнений строится силовой многоугольник, (план сил), находятся реакции сначала во внешних кинематических, затем во внутренних. После этого переходят к следующей группе и так до тех пор, пока не будет произведен силовой расчет всех групп; 9) силовой расчет заканчивается исследованием ведущего звена.
Рассмотренных предпосылок достаточно, чтобы выполнить силовой расчет любого рычажного механизма.
В работах [3-5] показан рекомендуемый порядок кинетостатического расчета групп Ассура II класса 1-5 видов и группы III-го класса и ведущего звена.
Рассмотрим в рамках процессуального блока [6] кинетостатический расчет механизма на примере восьмизвенника, изображенного на рисунке 1.
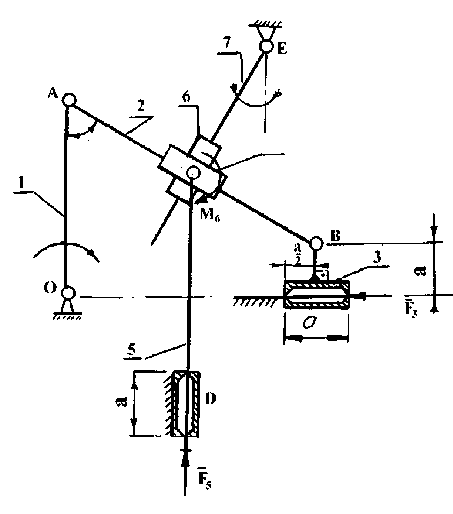
Требуется найти реакции
R12, R24, R05, R54, R03, R03, R67, R46, если известно: F 3 = 450H;
F5 = 300H; M6 = 60H • м;1сE = 0,4м;
1СД = 0,6 м; а = 0,2 м; АС = ВС ,l0A = 0,6 м
Рис.1. Схема механизма.
В соответствие с описанным выше алгоритмом выполним силовой анализ механизма.
-
1. Выделим из состава механизма группу звеньев 6, 7 и нагрузим действующими нагрузками (см. рис.2).
-
1.1. Составим уравнение моментов относительно точки С для всей группы, надем реакцию Rt 07
-
Ж(С)3 в 6,7 = 0 R 07 • ЕС- М б = 0
Rt 07 = М 6 /СЕ = 60 Н . м / 0,4 м = 150Н
-
1.2. Составим векторное уравнение суммы всех сил , действующих на 7-е звено
X F(71 = 0 R07+Rn + R67 = 0
Строим силовой многоугольник.
R7 = 0; R =- R‘ =
Найдем 07
= 150H;
-
1.3. Рассмотрим равновесие 6-го звена и найдем,
-
2. Рассмотрим расчет группы звеньев 4 – 5.
-
2.1. Составим уравнение векторной суммы всех сил, решим его графически
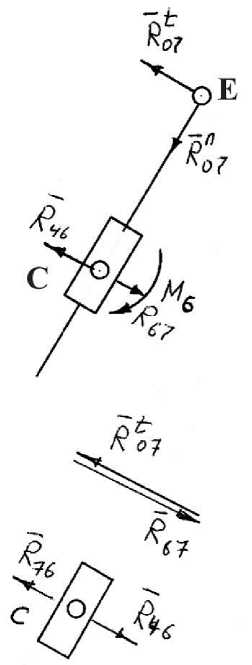
Рис. 2. Расчет группы 7-6.
2 F i25 = R 64 + R 24 + R 05 + R 05 + F 5 = 0
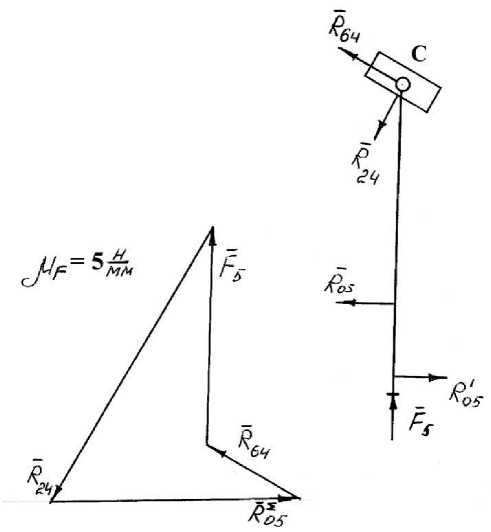
Рис. 3. Расчет группы 5-4.
-
-
2.2. Для нахождения реакций R 05 и R 05' составим уравнение моментов относительно точки С для 5-го звена.
R46 =- R67 = R^
= 150H
Из плана сил найдем R 24 = 90 • 5 = 450H; R 05 + R 05 = 70 • 5 = 350H;
(СД + а) , 0,6 + 0,2
R05 • СД = R„5 (СД + а) R05 = С, = ^5 = 1,33R0s
СД 0,6
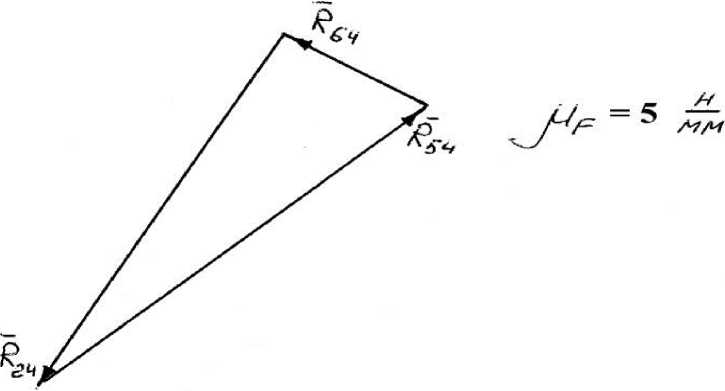
Рис. 4 Расчет точки С для 5-го звена
'
отсюда R05 = 1400H; R05 = 1050H
2.3. Для нахождения реакции R 54 рассмотрим равновесие 4-го звена.
R54 = 90 • 5 = 450H
3. Группа звеньев 2-3.
3.1. Составляем уравнение моментов относительно точки В для 2-го звена:
ZM2зв(В) = 0 R42 • BC- R07 • 2BC = 0, отсюда
t
R12 = -R42 = 225H.
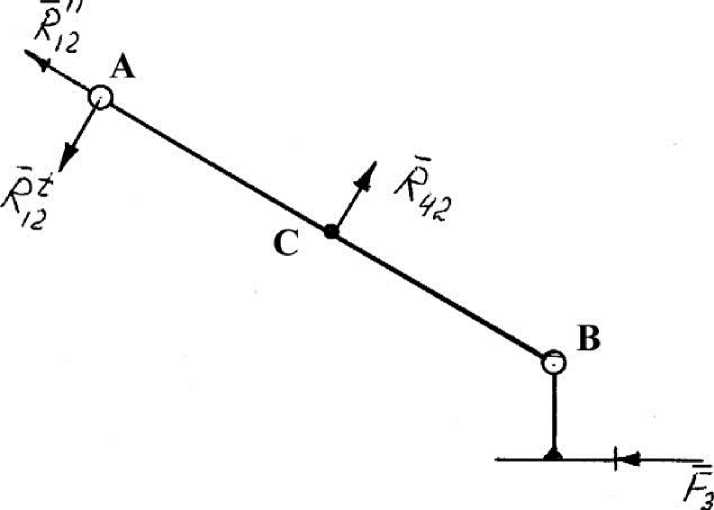
Рис. 5. Расчет группы 2-3.
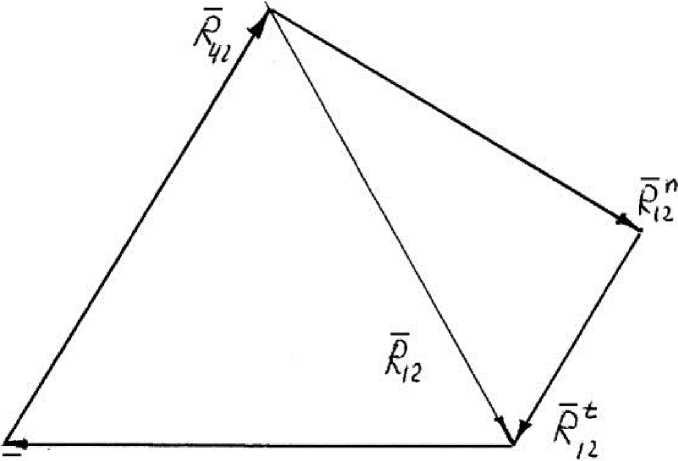
3.2. Составляем векторное уравнение суммы всех сил, действующих на группу
Z F-з2’3 = 0
R 12 + R 12 + R 42 + F 3 + ( R 01 + R 01 ) = 0 , строим план сил
(см. рис. 6).
Из плана сил находим R 12 = 450H;
Rob + R03 )= 0
H
R F = 5 мм
3.3. Составим уравнение моментов относительно точки В для 3-го звена:
R 03 •
a 'a
—+ R03 • — = F • a
2 23
отсюда
— ' — .
R03 = R03 = F3 = 450H
Окончательно получим значения искомых реакций:
'
R07 = R67 = R46 = 150H; R24 = 450H, R05 = 150H; R05 = 1050H;
'
R54 = 450H; R12 = 450H; R03 =- R03 = 450H.
F3
Рис. 6. План сил группы 2-3.
Таким образом, представленное содержание кинетостатического анализа рычажных механизмов (теоретические сведения), описанный алгоритм этого анализа механизма с использованием имеющегося методического сопровождения обеспечивают эффективную самостоятельную работу студентов по решению задач силового расчета кинематических цепей различной сложности. На наш взгляд, данный подход формирует у студентов не только мотивацию к самостоятельному овладению знаниями по механике, но и способствует формированию инженерного мышления в целом.
Список литературы Методические особенности решения задач по кинестатическому анализу рычажных механизмов
- Журавлев И. К., Зорина Л. Я. Дидактическая модель учебного предмета // Новые исследования в педагогических науках. - 1979. - № 1. - С. 18-23.
- Наумкин Н. И., Грошева Е. П., Купряшкин В. Ф. Подготовка студентов национальных исследовательских университетов к инновационной деятельности в процессе обучения техническому творчеству / под ред. П. В. Сенина, Ю. Л. Хотунцева. - Саранск: Изд-во Мордов. ун-та, 2010. - 120 с. EDN: QMHQAX
- Наумкин Н. И., Раков Н. В., Купряшкин В. Ф. Теория механизмов и машин: учебник / под общ. ред. П. В. Сенина, Н. И. Наумкина. - 2-е изд., испр. и доп. - Саранск: Изд-во Мордов. ун-та, 2008. - 188 с. EDN: QNCCQP
- Наумкин Н. И. Сборник задач по теории механизмов и машин. - Саранск: Изд-во Мордов. ун-та, 2008. - 296 с. EDN: QNCCPB
- Теория механизмов и машин / под ред. К. Ф. Фролова. - М.: Высш. шк, 1987. - 496 с.
- Чернилевский Д. В., Филатов О. К. Технология обучения в высшей школе / под ред. Д. В. Чернилевского. - М.: Экспедитор, 1996. - 288 с.
