Методический подход к формированию наземного контура управления многоспутниковой группировкой

Автор: Дудко Александр Николаевич, Кучеров Борис Алексеевич, Смолоковский Андрей Валерьевич, Литвиненко Антон Олегович, Донсков Алексей Витальевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 4 (43), 2023 года.
Бесплатный доступ
Для организации управления многоспутниковыми группировками (МСГ) предлагаются различные схемы построения систем управления, основанные как на традиционном наземном контуре управления, так и на межспутниковых линиях связи и эшелонированных системах космической ретрансляции. Если последние два направления являются далёкой либо среднесрочной перспективой, то задействование наземного контура для обеспечения управления МСГ в ближнесрочной перспективе, с учётом развитой инфраструктуры, является наиболее реальным. Предлагается подход к формированию наземного контура управления (НКУ) многоспутниковой группировкой, основанный на оптимизации количества и расположения командно-измерительных систем и количества каналов одновременного управления несколькими космическими аппаратами из одного или разных центров управления полётами. Приведены этапы реализации методического подхода и система показателей, используемых при оптимизации. На примере показана принципиальная возможность применения предлагаемого метода. Представлены результаты серии имитационных экспериментов, полученные с использованием компьютерного моделирования, при этом учитываются баллистические характеристики и орбитальное построение МСГ, а также пространственно-временные ограничения применения командно-измерительных систем. Показано, что предложенный авторами методический подход позволяет обосновывать различные варианты построения НКУ космическими аппаратами, а также, исходя из требований к космической системе по сеансному обмену, обосновывать ключевые требования к НКУ МСГ в части состава и построения НКУ, в т. ч. с мультиантенной реализацией.
Многоспутниковая орбитальная группировка, космический аппарат, наземный комплекс управления, командно-измерительный пункт, командно-измерительная система, антенная система, сеанс связи, достаточность
Короткий адрес: https://sciup.org/143181064
IDR: 143181064 | УДК: 629.78.086
Methodological approach to forming the ground control loop for a multi-satellite constellation
Various control system architectures are being proposed for setting up control of Multi-Satellite Constellations (MSC), that are based on both conventional ground control loop and inter-satellite communications links/layered space relay systems. While the last two approaches represent the long-term or mid-term perspectives, the most realistic approach to the MSC control for the near-term, taking into account the developed infrastructure, consists in using the ground loop. The paper proposes an approach to setting up the Ground Control Loop (GCL) for a multi-satellite constellation based on optimizing the quantity and locations of command and measurement systems and the number of channels for simultaneous control of several spacecraft from one or several different mission control centers. It discusses implementation phases of the methodological approach and the system of metrics used for optimization. Through an example, it demonstrates the feasibility of using the proposed method. It presents results of a series of computer simulations that took into account the MSC trajectories and orbital configuration as well as space and time constraints on the use of command and measurement systems. It demonstrates that the methodological approach proposed by the authors makes it possible to validate various options for spacecraft ground control loops architecture, as well as to use the space system requirements for sessions exchange to provide rationale for requirements for MSC GCL as regards GCL constituents and configuration, including a multi-antenna implementation.
Текст научной статьи Методический подход к формированию наземного контура управления многоспутниковой группировкой

куЧеров Б.а.



донСков а.в.
СМолоковСкиЙ а.в. литвиненко а.о.
Перспективные космические технологии предъявляют повышенные требования к функционалу и принципам применения космических аппаратов (КА), обусловливая необходимость их изменения, что влечёт за собой значительное увеличение количества уникальных исследовательских КА и создание многоспутниковых космических систем различного назначения (связь, дистанционное зондирование Земли (ДЗЗ), глобальные навигационные спутниковые системы и др.) с орбитальными группировками, включающими в себя десятки, сотни и более КА [1, 2].
При этом повышаются требования к значениям показателей применения КА в части оперативности, информативности, глобальности, производительности и пропускной способности, что требует переориентации системного эффекта некоторых космических систем [3, 4]. На ранних этапах развития космических технологий системный эффект космической системы заключался в совокупности целевых эффектов каждого КА, функционирующего по определённой программе полёта для решения отдельной целевой задачи [1]. В настоящее время, при возросших требованиях к показателям применения КА, для достижения системного эффекта космической системой требуется реализация совокупности целевых эффектов некоторого множества КА при решении определённой целевой задачи [1, 2].
Совокупность условий, принципов взаимодействия объектов наземной и космической инфраструктур многоспутниковых группировок (МСГ), направленных на достижение требуемых системных эффектов, определяет такое свойство системы, как целостность [5]. Таким образом, целостность — свойство космической системы, наземные и космические объекты которой организованы в соответствии с определённой концепцией для решения целевых задач и достижения определённого системного эффекта. Для обеспечения свойства целостности МСГ требуется поддержание орбитальной структуры и баллистического построения группировки (сохранение количественного состава и относительного движения КА в созвездии), а также технической готовности КА к решению ряда целевых задач, в т. ч. при возникновении нештатных ситуаций (в части неисправности бортовой аппаратуры, ухода аппаратов со своих орбитальных позиций или отклонения плоскости орбиты части системы от заданного положения). В связи с этим актуальной является разработка новых технологий управления МСГ, как новым типом космических объектов. Главной особенностью новых технологий управления является переход от управления конкретным КА для решения отдельных целевых задач в соответствии с планом полёта к управлению системным эффектом всей МСГ. Это порождает новые требования к таким характеристикам системы, как глобальность, оперативность, производительность, пропускная способность, а также доступность КА и экономическая эффективность контура управления в целом (наземного и/или космического).
Для выполнения вышеперечисленных требований система управления МСГ должна быть обеспечена технологиями управления КА, основанными на следующих принципах:
-
• оптимальное распределение задач управления МСГ, которые должны решаться непосредственно бортовой аппаратурой КА, центром управления полётами (ЦУП) или итеративно бортовой аппаратурой КА и ЦУП;
-
• формирование наземного комплекса управления (НКУ) из унифицированных средств коллективного доступа, позволяющих реализовать принцип «каждый с каждым»;
-
• универсализация средств управления и приёма целевой информации;
-
• применение многолучевых антенных систем на основе активных фазированных антенных решеток (АФАР) и многоканальных приёмо-передающих комплексов для обеспечения возможности одновременного проведения нескольких сеансов управления или/и приёма информации из одного пункта [6];
-
• организация многопоточного высокоавтоматизированного управления КА из ЦУП МСГ;
-
• бортовая обработка информации и управление вычислительной сетью на основе КА-серверов в случае реализации распределённой обработки информации в рамках МСГ;
-
• автоматизированная (автоматическая) технология планирования и доведения до абонентов порядка задействования средств НКУ, маршрутизации межспутниковых линий связи (МЛС) и каналов ретрансляции спутников-ретрансляторов (СР).
Однако, какими бы ни были технологии управления МСГ (по назначению, построению и др.), они все основаны на необходимости наличия возможности обеспечения информационного обмена «ЦУП ↔ КА» в части приёма/передачи командной, программной, телеметрической и др. информации по соответствующему контуру управления.
Информационный обмен в процессе управления КА из состава МСГ может осуществляться с использованием либо наземного1, либо космического контура управления, либо при их комплексном задействовании (рис. 1).
Естественно, что одномоментное развитие технологий управления с использованием всех вышеперечисленных принципов и комплексного задействования различных контуров управления невозможно по определённым причинам (отсутствие соответствующей электронно-компонентной базы и др.). Поэтому вполне оправданно, с учётом реалий, поэтапное развитие и совершенствование системы управления МСГ, в основе которой лежит традиционная технология, использующая наземный контур управления.
В общем случае наземный контур управления МСГ включает в себя:
-
• орган управления космической многоспутниковой группировкой — ЦУП МСГ;
-
• орган планирования задействования технических средств (ТС) НКУ — центр ситуационного анализа, координации и планирования (ЦСАКП);
-
• средства управления — командноизмерительная станция (КИС), бортовой комплекс управления (БКУ) КА и т. п.;
-
• средства системы связи и приёма/ передачи данных (ССПД).
Задачи управления КА решаются путём проведения сеансов управления с каждым КА. Характеристики сеанса связи (СС) задаются ЦУПом в определённом формате (заявка). ЦУПы различных орбитальных группировок (ОГ) формируют подмножествa заявок ( Z 1… Zg ), которые передаются в ЦСАКП, где формируется обобщённая заявка на определённые сутки. На основании заявок ( Z 1… Zg ), содержащих N з требований (где N з — общее количество заявленных СС) к проведению сеансов связи, формируется план задействования ТС НКУ

Рис. 1. Контур управления космическим аппаратом: ЦУП МСГ — центр управления полётом многоспутниковой группировкой; ЦУП ОГn — центр управления полётом n-й орбитальной группировки; ЦУРС — центр управления ретрансляцией и связью; ЦСАКП — центр ситуационного анализа, координации и планирования; БКУ КАk — бортовой комплекс управления k-го космического аппарата; КА СР — космический аппарат системы ретрансляции; КИС СР — командно-измерительная станция КА СР; КИСm — m-я командно-измерительная станция (рисунок создан авторами)
(ПЗС), обеспечивающий в интересах каждой g -й ОГ выполнение необходимого объёма работ с КА, соблюдая равномерность загрузки ТС. Формирование ПЗС заключается в приведении требований заявок в соответствие техническим возможностям и ресурсу pg -х ТС НКУ ppr . Задействование ppr проводится с учётом установленного лимита на расходуемый рабочий ресурс Rp доп. При этом учитываются ограничения по проведению работ с ТС НКУ (ремонтно-восстановительные работы, техническое обслуживание, модернизация и т. п.), а также данные о наземной обстановке на командноизмерительных пунктах (КИП) (электромагнитная обстановка, углы закрытия и др.). Время задействования ppr -го ТС НКУ складывается из времени подготовки ТС НКУ к проведению СС t подг и длительности СС ( t к – t н, где t к и t н — конечное и начальное время СС).
При увеличении количественного состава МСГ увеличивается требуемое количество СС, а соответственно, и конкуренция за использование ресурсов ТС НКУ, в связи с чем возникает вопрос об оптимальном (необходимом и достаточном) составе ТС НКУ. Необходимость оптимизации состава ТС НКУ определяется тем, что при переизбытке ТС возникают большие неоправданные финансовые затраты, а при недостатке — не все заявленные сеансы связи могут быть включены в ПЗС, т. е. запланированы, в связи с чем возникает невыполнение требований по управлению КА, что может привести в предельном случае к потере управления КА. Должен соблюдаться баланс между количеством заявленных СС и достаточным ресурсом ТС НКУ. Под достаточностью ресурсов ТС НКУ будем понимать возможность обеспечения техническим (временным) ресурсом ТС НКУ проведения всего количества сеансов связи, заявленного ЦУПами, с целью обеспечения свойства целостности МСГ [7].
Поэтому в основу методического подхода к формированию НКУ многоспутниковой группировкой положен принцип достаточности ресурса ТС НКУ для удовлетворения требований ЦУП по проведению СС, необходимых для управления МСГ.
Решение задачи формирования НКУ МСГ, способного обеспечить достаточность ресурса, основано на учёте и анализе следующих факторов:
-
• состава и расположения КИП;
-
• количества КИС или антенных систем (АС) на КИП;
-
• универсальности ЦУП в части возможности одновременного управления несколькими КА;
-
• характеристик орбитальной структуры и баллистического построения МСГ.
Методический подход к решению рассматриваемой задачи заключается в оптимизации наземного контура в части состава, построения, комплектности и применения, при которых будет обеспечена достаточность ТС НКУ. Подход содержит несколько этапов:
-
• постановка задачи оптимизации наземного контура;
-
• определение оцениваемых показателей, критериев;
-
• формирование исходных данных;
-
• определение ограничений и допущений по условиям задачи;
-
• определение условий моделирования;
-
• планирование модельных экспериментов;
-
• разработка сценариев моделирования и вариантов оцениваемых ситуаций;
-
• реализация плана эксперимента;
-
• анализ и интерпретация результатов моделирования;
Рассмотрим основные этапы реализации методического подхода.
Задачу оптимизации наземного контура можно сформулировать таким образом: для управления МСГ требуется обеспечить ресурсом технических средств НКУ проведение определённого количества сеансов управления в сутки с заданной длительностью. Исходя из требуемого количества сеансов управления требуется определить состав, расположение КИС (конфигурацию контура управления), задействование мультиантенных систем, а также необходимость организации одновременного управления более чем одним КА, что, в конечном итоге, позволит минимизировать суммарные затраты на обеспечение надёжного управления МСГ.
Математическая постановка данной задачи будет иметь описанный ниже вид.
Космическая группировка (КГ) состоит из множества ОГ КА различного назначения (ОГ1, ОГ2, …, ОГi, …, ОГg), каждая из которых содержит подмножество КА ОГ (k11, …, k1n), (k21, …, k2m), …, (kg1, …, kgr), где k11, k1n ∈ ОГ1 и т. п. Основным контуром управления КГ является НКУ на основе множества ТС НКУ «коллективного доступа» (p11, …, p1n), (p21, …, p2m), …, (pp1, …, ppr), распределённых на множестве (J1, …, Jm) КИП, где p11, …, p1n ∈ J1 и т. п., с характеристиками расположения L(λ, ϕ), где L — географические координаты; λ — широта; ϕ — долгота.
Управление КГ осуществляется посредством проведения множества сеансов связи s 11, …, sgr ∈ S СС между ЦУП и КА МСГ с задействованием pp 1, …, ppr ТС НКУ. В соответствии с программой полёта и с учётом типовых технологических циклов управления (ТЦУ) КА определено количество требуемых сеансов связи в сутки для каждого kgr -го КА ( sgr ).
Требуется опред → елить → значе → ния характеристик НКУ X НКУ, Х СУ, Х МСГ, при которых
→ →→
Q = F ( X НКУ , Х СУ , Х МСГ ) = 1 (1)
при условии → Х МСГ = const.
Здесь → Х МСГ = { a 1, …, an , b 1, …, bk } — вектор, компоненты которого определяют орбитальную структуру a и баллистическое построение b МСГ; → X НКУ = { J 1 ( L 1 ), …, J m ( L m ), p p 1, …, p p r } — вектор, компоненты которого определяют количественный состав КИП J , расположение КИП L (λ, ϕ) и комплектность антенных систем p КИС; → p
Х СУ = { v , ts , s СС} — вектор, компоненты которого определяют особенности применения системы управления в части одновременного управления несколькими КА v , количества СС s СС и требуемой длительности сеанса связи ts .
Таким образом, формирование наземного контура заключается в определении оптимального сочетания структурного построения (количество и нахождение КИП) НКУ, комплектности (количество АС на КИП) и количества одновременно управляемых КА (далее по тексту — «вектор управления КА»), при которых будет обеспечена достаточность ТС НКУ.
Основным условием достаточности ТС НКУ является обеспечение ресурсом ТС НКУ всего заявленного количества сеансов связи. Учитывая, что в ПЗС включаются только те СС (или пункты заявки), которые гарантированно обеспечены ресурсом ТС НКУ, можно представить основное условие достаточности в следующем виде:
N з = N ПЗС ,
где N з — заявленные сеансы связи; N ПЗС — запланированные сеансы связи.
За основной показатель оценки достаточности примем численное значение характеристики, определяющей ёмкость, или объём, ПЗС Q . Объём ПЗС, определяющий долю запланированных СС, т. е. включённых в ПЗС, от общего числа заказываемых (заявленных) СС, определяется следующим образом:
N
ПЗС
Q = N з . (3)
Принимая допущение, что все элементы контура управления работают надёжно, можно сказать, что все запланированные сеансы связи будут реализованы при проведении сеансов управления. Критерий достаточности U представим следующим образом:
при Q = 1 — средств достаточно;
при Q < 1 — средств недостаточно.
То есть, если все заявленные СС, необходимые для обеспечения выполнения суточного ТЦУ всех КА из состава МСГ, могут быть обеспечены ресурсом соответствующих ТС (включены в ПЗС, Q = 1) — средств достаточно.
Рассматриваемый методический подход основан на детерминированном факторном анализе, позволяющем определить степень влияния отдельных факторов на изменение оцениваемого показателя достаточности.
Для оценки влияния учитываемых факторов (в → нашем → случа → е — компоненты векторов X НКУ, Х СУ, Х МСГ) требуется организация и проведение ряда компьютерных экспериментов с использованием динамических моделей состояния системы «МСГ–НКУ». Основной метод проведения экспериментов — имитационное моделирование.
Эффективность экспериментов с проведением имитационного моделирования существенно зависит от выбора плана эксперимента, так как именно план определяет объём и порядок проведения вычислений [8]. В нашем случае факторы имеют дискретный характер и принимают количественные значения. Поэтому для получения оценок значений отклика необходимо проводить планирование экспериментальных работ по принципу «каждый с каждым». Изменение хотя бы одного из факторов в таком наборе приведёт к изменению условий и, как следствие, — значения параметра отклика. С целью рационального сокращения количества экспериментальных исследований используется специальный вид планов — планы на латинских квадратах [9].
В табл. 1 приведён общий состав факторов и их уровней, влияющих на опти → мальность состава НКУ (при условии Х МСГ = const). В табл. 2 — план проведения пятифакторного эксперимента, разработанный на латинских квадратах.
При необходимости уточнения значений отдельных факторов организуется дополнительное количество прогонов модели. Дополнительное количество прогонов определяется в процессе проведения исследований.
Далее представлены результаты практической реализации методического подхода с использованием исходных данных, характеризующих гипотетическую группировку и характеристики гипотетического НКУ, подлежащие оптимизации.
Орбитальное построение МСГ:
состав ОГ 200 КА; высота орбиты 600 км; тип орбиты солнечно-синхронная; число орбитальных плоскостей 20;
число КА в плоскости 10.
Состав НКУ
Базовый вариант: три КИП — высокоширотные (61° с. ш. - 70° с. ш.); семь КИП — среднеширотные (45° с. ш. - 60° с. ш.). На каждом КИП располагается до четырёх АС с функциями КИС. В процессе моделирования рассматриваются варианты исключения высокоширотных КИП и изменения количества АС.
Ограничения и допущения по условиям задачи:
-
• при проведении анализа технические возможности средств мультисервисной системы связи и передачи данных считаются достаточными, ТС НКУ работоспособны;
-
• время подготовки АС — 15 мин;
-
• минимальный угол места при проведении сеанса связи с КА — 7°.
Определение условий моделирования:
-
• модельное время — 1 сут, моделируемый интервал — 7 сут.
Сценарии и варианты оцениваемых ситуаций
Рассматривается два сценария формирования НКУ.
Реализация первого сценария заключается в получении пространства «критических точек» при проведении компьютерного моделирования в соответствии с планом проведения пятифакторного эксперимента (табл. 2). Анализируемые факторы и значения их уровней приведены в табл. 3.
Варианты оцениваемых ситуаций для первого сценария приведены в табл. 4.
Реализация второго сценария заключается в определении «критических точек» и планировании дополнительных прогонов модели с изменением состава и структуры КИП, количества векторов управления КА для получения требуемых значений показателя достаточности ( Q = 1) в окрестностях выбранных «критических точек».
Таблица 1
Состав и условные обозначения факторов, их уровней и соответствующей реакции (отклика)
|
Общая характеристика |
Фактор |
Обозначение |
1-й уровень |
2-й уровень |
3-й уровень |
Отклик |
|
|
→ X НКУ |
Количество и расположение КИП, ед. |
J |
J 1 |
J2 |
J 3 |
U = F ( Q ) |
|
|
Комплектность (количество «антенн» на КИП), ед. |
pp r |
P 1 |
P 2 |
P 3 |
|||
|
→ Х СУ |
Количество СС для КА, ед./сут |
s CC |
S 1 |
S 2 |
S 3 |
||
|
Длительность СС, мин |
t s |
T 1 |
T 2 |
T 3 |
|||
|
Одновременное управление несколькими КА, шт |
v |
V 1 |
V 2 |
V 3 |
Таблица 2
План проведения пятифакторного эксперимента, разработанный на латинских квадратах
|
J 1 |
J 2 |
J 3 |
|
|
P 1 |
T 1 V 1 S 1 |
T 1 V 2 S 2 |
T 1 V 3 S 3 |
|
P 2 |
T 2 V 2 S 1 |
T 2 V 3 S 2 |
T 2 V 1 S 3 |
|
P 3 |
T 3 V 3 S 1 |
T 3 V 1 S 2 |
T 3 V 2 S 3 |
Таблица 3
Состав факторов и их уровней
|
Фактор |
Обозначение |
1-й уровень |
2-й уровень |
3-й уровень |
|
Количество и расположение КИП, ед |
J |
J 1=10 |
J 2=8 |
J 3=6 |
|
Комплектность (количество АС на КИП), ед |
Р |
P 1=1 |
P 2=3 |
P 3=4 |
|
Количество СС для КА, ед/сут |
S |
S 1=1 |
S 2=2 |
S 3=3 |
|
Длительность СС, мин |
T |
T 1=4 |
T 2=6 |
T 3=9 |
|
Векторы управления КА, шт |
V |
V 1=1 |
V 2=3 |
V 3=5 |
Таблица 4
варианты оцениваемых ситуаций (воС) для первого сценария
|
Номер ВОС |
ВОC |
||||
|
1.1 |
J 1 |
P 1 |
T 1 |
V 1 |
S 1 |
|
1.2 |
J 1 |
P 2 |
T 2 |
V 2 |
S 1 |
|
1.3 |
J 1 |
P 3 |
T 3 |
V 3 |
S 1 |
|
1.4 |
J 2 |
P 1 |
T 1 |
V 2 |
S 2 |
|
1.5 |
J 2 |
P 2 |
T 2 |
V 3 |
S 2 |
|
1.6 |
J 2 |
P 3 |
T 3 |
V 1 |
S 2 |
|
1.7 |
J 3 |
P 1 |
T 1 |
V 3 |
S 3 |
|
1.8 |
J 3 |
P 2 |
T 2 |
V 1 |
S 3 |
|
1.9 |
J 3 |
P 3 |
T 3 |
V 2 |
S 3 |
Приведённые сценарии реализуются описанным ниже образом.
На первом этапе моделирования проводится оценка количества КА, одновременно находящихся в зоне радиовидимости (ЗРВ) КИС, а также временное распределение длительности ЗРВ, в зависимости от широты нахождения КИП с целью последующей оптимизации необходимого количества АС и максимальной длительности СС для обеспечения достаточности и исключения избыточности ресурса КИС.
На рис. 2, 3 для рассматриваемой МСГ приведена зависимость количества КА, одновременно находящихся в ЗРВ КИС, от широты нахождения КИП и характеристики ЗРВ для разных КИП.
Анализ приведённых зависимостей показывает, что при необходимости для рассматриваемой группировки можно обеспечить одновременное управление полётом от 8 до 16 КА (рис. 2) при длительности СС до 10 мин (рис. 3) в зависимости от широты нахождения КИП.
На следующем этапе определим тенденции изменения значения показателя достаточности Q или отклика на основе оценки главных эффектов влияющих факторов (сценарий 1). В основу анализа положены результаты моделирования пятифакторного эксперимента.
Моделирование состояния системы «МСГ–НКУ» проводится в соответствии с планом реализации ВОС (табл. 4) с привлечением доработанного программно-математического обеспечения компьютерного моделирования функционирования системы планирования задействования средств НКУ [10, 11]. Варианты оцениваемых ситуаций (ВОС) и результаты моделирования для первого сценария приведены в табл. 5.
При реализации второго сценария в зависимости от требований, предъявляемых к организации управления ОГ КА и состояния существующей, либо проектируемой, наземной инфраструктуры, из данных табл. 5 определяются соответствующие «критические точки» и организуются дополнительные прогоны модели.
Рассмотрим варианты построения НКУ с шестью среднеширотными КИП (№ 2, 3, 4, 5, 6, 7 на рис. 2 и 3), который должен обеспечивать 3 СС/сут с КА продолжительностью не менее 4; 6 и 9 мин. Для этого сценария «критическими точками» являются результаты моделирования ВОС № 1.7; 1.8 и 1.9.
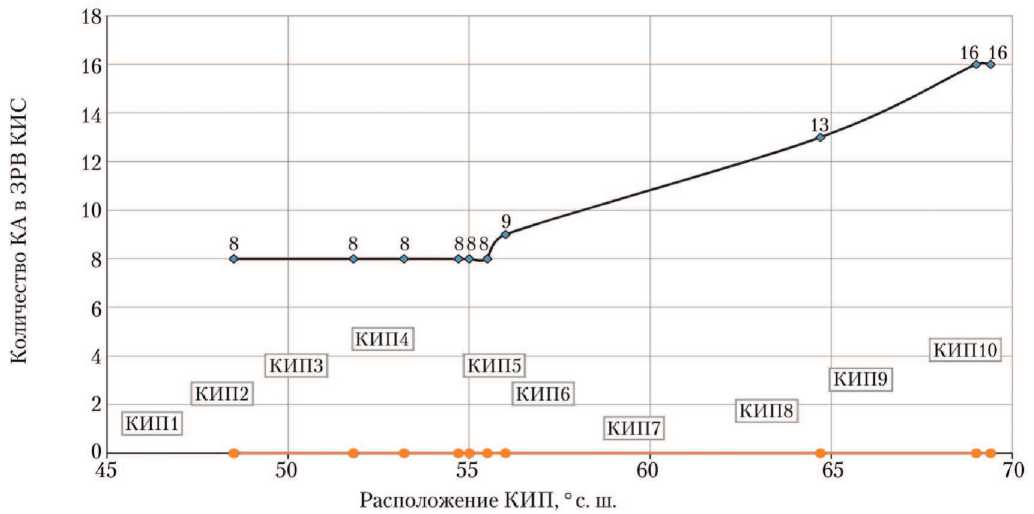
Рис. 2. Зависимость количества космических аппаратов (КА), одновременно находящихся в зоне радиовидимости командно-измерительной станции (ЗРВ КИС), от широты нахождения командно-измерительных пунктов (КИП) (рисунок создан авторами)
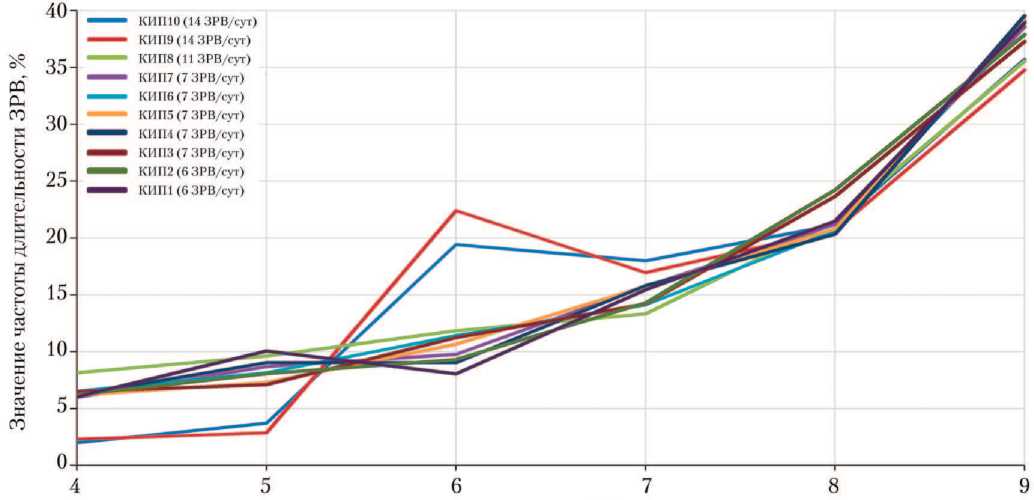
Длительность ЗРВ, мин
Рис. 3. Характеристики зон радиовидимости (ЗРВ) для разных командно-измерительных пунктов (КИП) (рисунок создан авторами)
В результате дополнительных прогонов модели с изменением количества векторов управления КА, состава и структуры КИП обеспечено требуемое значение показателя наполнения плана ( Q = 1) в окрестностях выбранных «критических точек», а соответственно, достигнут критерий достаточности. Результаты серии имитационных экспериментов, полученные с использованием компьютерного моделирования, представлены в табл. 6
Анализ результатов моделирования показывает, что для обеспечения управления МСГ в составе 200 КА при реализации суточного ТЦУ в объеме трёх СС продолжительностью 4; 6 и 9 мин потребуется шесть КИП, находящихся на средних широтах, с тремя АС на каждом. При этом требуемые возможности НКУ по количеству векторов управления КА зависят от требуемой длительности сеанса управления.
Таблица 5
значение показателя достаточности Q при различных вариантах оцениваемых ситуаций (воС) для первого сценария
|
Номер ВОС |
ВОС |
Q |
||||
|
1.1 |
J 1 |
P 1 |
T 1 |
V 1 |
S 1 |
0,96 |
|
1.2 |
J 1 |
P 2 |
T 2 |
V 2 |
S 1 |
1,00 |
|
1.3 |
J 1 |
P 3 |
T 3 |
V 3 |
S 1 |
1,00 |
|
1.4 |
J 2 |
P 1 |
T 1 |
V 2 |
S 2 |
0,72 |
|
1.5 |
J 2 |
P 2 |
T 2 |
V 3 |
S 2 |
1,00 |
|
1.6 |
J 2 |
P 3 |
T 3 |
V 1 |
S 2 |
0,87 |
|
1.7 |
J 3 |
P 1 |
T 1 |
V 3 |
S 3 |
0,39 |
|
1.8 |
J 3 |
P 2 |
T 2 |
V 1 |
S 3 |
0,66 |
|
1.9 |
J 3 |
P 3 |
T 3 |
V 2 |
S 3 |
0,96 |
Таблица 6
значение показателя наполнения плана Q (при сценарии моделирования: 200 ка, 600 СС/сут, 6 киП по 3 аС)
|
Длительность СС, мин ( T ) |
Количество АС ( P , J ) |
Количество векторов управления КА ( V ) |
Объём ПЗС ( Q ) |
|
Не менее 4 ( Т 1) |
6×3 ( P 2, J 3) |
10 |
1 |
|
Не менее 6 ( Т 2) |
6×3 ( P 2, J 3) |
11 |
1 |
|
Не менее 9 ( Т 3) |
6×3 ( P 2, J 3) |
12 |
1 |
Примечание. КА — космический аппарат; СС — сеанс связи; КИП — командно-измерительный пункт; АС — антенная система; ПЗС — план задействования средств наземного комплекса управления.
Так, например, для организации управления рассматриваемой МСГ требуется проведение 600 СС/сут длительностью не менее 9 мин. Это требование может быть обеспечено при задействовании шести среднеширотных КИП (№ 2, 3, 4, 5, 6, 7 на рис. 2 и 3), имеющих по три работоспособных АС (КИС), при одновременном управлении двенадцатью КА. Для реализации 600 СС/сут длительностью не менее 6 мин — при одновременном управлении одиннадцатью КА, и не менее 4 мин — при одновременном управлении десятью КА.
заключение
Предлагаемый методический подход и разработанное программное обеспечение планирования задействования
ТС НКУ позволяют при проектных, изыскательских и оперативных работах проводить:
-
• обоснование требований по составу и построению НКУ МСГ;
-
• обоснование предложений по интеграции и взаимодействию системы управления с существующим наземным автоматизированным комплексом управления КА;
-
• проектировать различные варианты построения НКУ КА, в т. ч. с мультиантенной реализацией;
-
• планировать большие объёмы СС с оптимальным задействованием ресурсов средств управления коллективного доступа в условиях разрешения конфликтных ситуаций и ресурсных ограничений.
Список литературы Методический подход к формированию наземного контура управления многоспутниковой группировкой
- Потюпкин А.Ю., Пантелеймонов И.Н., Тимофеев Ю.А., Волков С.А. Управление многоспутниковыми орбитальными группировками / / Ракетно-космическое приборостроение и информационные системы. 2020. Т. 7. Вып. 3. С. 61-70. EDN: LYHOMH
- Балухто А.Н., Матвеев С.А., Матюшин М.М., Твердохлебова Е.М. Технологии искусственного интеллекта в управлении многоспутниковыми группировками // Космонавтика и ракетостроение. 2020. № 3(114). С. 64-73. EDN: OSXLLM
- Матюшин М.М., Кутоманов А.Ю., Иванов А.А., Котеля В.В. Анализ путей повышения эффективности управления космическими аппаратами различного целевого назначения за счёт унификации и интеграции средств управления полётом // Инженерный журнал: наука и инновации. 2021. № 11(119). С. 1-16. EDN: DDRVWW
- Галузин В.А., Кутоманов А.Ю., Матюшин М.М., Скобелев П.О. Обзор современных методов планирования перспективных космических средств // Мехатроника, автоматизация, управление. 2020. Т. 21. № 11. С. 639-650. EDN: OAESPJ
- Перспективная технология управления многоспутниковой орбитальной группировкой: новость от 18.11.2020 // Роскосмос: официальный сайт. Режим доступа: https://www.roscosmos.ru/29579/ (дата обращения 22.06.2023).
- Шишлов А.В., Левитан Б.А., Топчиев С.А., Анпилогов В.Р., Денисенко В.В. Многолучевые антенны для систем радиолокации и связи // Журнал радиоэлектроники. 2018. № 7. С. 1-40. EDN: VABFJM
- Дудко А.Н., Кучеров Б.А., Литвиненко А.О. Методические основы оценки достаточности ресурса технических средств наземного комплекса для управления орбитальной группировкой космических аппаратов // Космонавтика и ракетостроение. 2021. № 3(120). С. 48-58. EDN: XRNHAI
- Любченко Е.А., Чуднова О.А. Планирование и организация эксперимента: учебное пособие. Владивосток: Изд-во ТГЭУ, 2010. Ч. 1. 156 с.
- Ходасевич Г.Б., Пантюхин О.И., Ногин С.Б. Планирование эксперимента и обработка экспериментальных данных на ЭВМ: учебное пособие. СПб.: СПбГУТ, 2014. Ч. 2. 86 с.
- Дудко А.Н., Кучеров Б.А., Литвиненко А.О., Сохранный Е.П. Метод планирования бесконфликтного задействования наземных технических средств при обеспечении управления группировкой космических аппаратов // Космонавтика и ракетостроение. 2014. № 1(74). С. 155-163. EDN: SEFZGV
- Патент RU 2566171 C2. МПК B64G 3/00. Способ разрешения конфликтных ситуаций при управлении полётами космических аппаратов / Дудко А.Н., Кучеров Б.А., Литвиненко А.О., Овечко В.М., Паздников В.Ю., Сохранный Е.П.; заявитель и патентообладатель — ФГУП ЦНИИмаш. Заявка № 2014101209/11 от 16.01.2014. Опубликовано 20.10.2015. Бюлл. № 29. Статья поступила в редакцию 31.05.2023 Окончательный вариант — 23.06.2023
