Методический подход к тренировке навыков летных экипажей авиационных комплексов по обнаружению и распознаванию типовых целей оптико-электронными радиолокационными головками самонаведения управляемых авиационных средств поражения класса «воздух - поверхность»

Автор: Аль Сафтли Фади Хайдар, Баланян Сергей Товмасович, Егоров Павел Сергеевич, Коновальцев Эдуард Валерьевич, Сазонов Владимир Михайлович
Рубрика: Управление сложными системами
Статья в выпуске: 2, 2022 года.
Бесплатный доступ
Представлена методика тренировки навыков по обнаружению и распознаванию летными экипажами типовых целей оптико-электронными головками самонаведения (телевизионными и тепловизионными) управляемых авиационных средств поражения класса «воздух - поверхность» в составе авиационных носителей. Данный подход применим для тренировки навыков по обнаружению целей радиолокационными системами наведения.
Средства поражения, визуальное обнаружение, распознавание, процесс обучения, изображение, наземная цель
Короткий адрес: https://sciup.org/148324424
IDR: 148324424 | УДК: 623.465.7 | DOI: 10.18137/RNU.V9187.22.02.P.069
Methodological approach to training the skills of flight crew of aircraft complexes for detection and recognition of typical targets by opto-electronic homing radiar heads of controlled aviation weapons of the class “air - surface”
A technique for training skills in detecting and recognizing typical targets by flight crews by optoelectronic homing heads (television and thermal imaging) of air-to-surface guided aircraft weapons as part of aircraft carriers is presented. This approach is applicable for training skills in target detection by radar guidance systems.
Текст научной статьи Методический подход к тренировке навыков летных экипажей авиационных комплексов по обнаружению и распознаванию типовых целей оптико-электронными радиолокационными головками самонаведения управляемых авиационных средств поражения класса «воздух - поверхность»
Опыт боевых действий в локальных войнах и вооруженных конфликтах последних десятилетий прошлого и начала нынешнего века показывает, что в большинстве военных конфликтов успех был достигнут благодаря действиям авиации. Одним из главных объектов для наземного удара авиации является бронетанковая техника противника (танк, бронетранспортер (далее – БТР), боевая машина пехоты (далее – БМП), позиция зенитно-ракетного комплекса (далее – ЗРК) и др.). Для эффективного поражения данных целей управляемыми авиационными средствами поражения (далее – УАСП), оснащенными оптико-электронными головками самонаведения (далее – ГСН) в условиях визуальной видимости, необходимо иметь определенные навыки по их обнаружению и распознава нию летным экипажем (далее – оператором) авиационног о комплекса.
Аль Сафтли Фади Хайдар адъюнкт кафедры авиационного вооружения и эффективности боевого применения. Военновоздушная академия имени профессора Н.Е. Жуковского и Ю.А. Гагарина, город Воронеж. Сфера научных интересов: повышение эффективности боевого применения ракет с телевизионными головками самонаведения; распознавание образов типовых наземных целей; нейросетевые алгоритмы. Автор 9 опубликованных научных работ.
Актуальность исследования
Промежуток времени от момента обнаружения и уничтожения бронетанковой техники противника в условиях современных боевых действий слишком мал, так как данные
Методический подход к тренировке навыков летных экипажей авиационных комплексов ...
цели находятся под прикрытием различных типов ЗРК. Натренированность летных экипажей авиационных комплексов обнаруживать и распознавать типовые наземные цели, такие как «танк», «БТР», «грузовой автомобиль» и др., сократит время для выполнения боевой задачи по поражению этих целей и увеличит эффективность боевого применения УАСП класса «воздух – поверхность».
Несмотря на то, что в последние годы всё большее развитие получают автоматизированные (автоматические) средства и системы поиска, обнаружения и опознавания объектов, визуальный метод не теряет своей актуальности, так как обладает рядом преимуществ как в отношении дальности обнаружения, так и в отношении точности контроля. К этим преимуществам относятся [3]:
Несмотря на то, что в последние годы всё большее развитие получают автоматизированные (автоматические) средства и системы поиска, обнаружения и опознавания объектов, визуальный метод не теряет своей актуальности, так как обладает рядом преимуществ как в отношении дальности обнаружения, так и в отношении точности контроля. К этим преимуществам относятся [3]:
-
• высокая разрешающая способность (около 1′ для невооруженного глаза);
-
• возможность работать в широком диапазоне яркостей (10–6…104 кд/м2) благодаря способности глаза к быстрой переадаптации;
-
• способность глаза работать в достаточно широком спектральном диапазоне (380…760 нм) и различать цвета;
-
• высокая световая чувствительность глаза (абсолютный порог 10–9лк);
-
• способность достаточно точно воспринимать движение объекта (опознавание объекта по признаку движения);
-
• способность оператора к обучению и тренировке;
-
• способность анализировать и исключать ненужные в данный момент объекты и др.
Однако не следует забывать об отрицательных факторах, таких как утомление, психологическое состояние оператора, сравнительно медленная реакция на появление сигнала (0,1…1 с) и др. [3].
Успешное выполнение визуального поиска, обнаружения и опознавания объектов зависит не только от объективных факторов, таких как угловой размер объекта, его контраст с фоном, яркость фона, размер поля поиска, вероятности и времени обнаружения (опознавания), но в значительной степени и от индивидуальных зрительных способностей человека-оператора.
Обнаружение объектов больших размеров и контрастов не представляет труда для любого. Однако с практической точки зрения наибольший интерес представляет задача быстрого и успешного (с высокой вероятностью) обнаружения объектов, имеющих небольшие размеры и малые контрасты с фоном. Эта задача доступна далеко не каждому. Обнаружение подобных объектов будет производиться тем быстрее, чем более высокими качествами зрительного аппарата будет обладать оператор.
Средством повышения эффективности выполнения подобных задач является, во-первых, профессиональный отбор операторов, обладающих от природы высокими качествами зрения, во-вторых, специальная тренировка их зрения в условиях поиска объектов.
Для проведения профессионального отбора необходимо определить:
-
• профессионально значимые зрительные функции оператора;
-
• методы измерения зрительных функций оператора, критерий, позволяющий объективно оценивать поисковые способности операторов;
-
• аппаратуру для проведения измерений зрительных функций и тренировки операторов.
Для операторов, выполняющих различные визуальные задачи, профессионально значимыми свойствами зрения являются:
-
• статическая острота (разрешающая способность);
-
• величина поля зрения глаз;
-
• порог стереоскопического (глубинного) зрения;
-
• контрастная чувствительность глаз;
-
• динамическая острота (особенно важна при обнаружении движущихся объектов);
-
• реакция на появление объекта.
Характеристики зрительного анализатора
Простейшей задачей визуального поиска является «обнаружение», то есть выделение из фона объекта, о котором оператор не может точно сказать, что это за объект. Следующая задача – «опознавание» – различение объекта, когда можно сказать, какой объект виден, какова его форма. Наивысшая степень сложности – различить не только общий облик объекта, но и отдельные мелкие детали, идентифицировать объект, отличить от других [2–4].
Психофизиологические основы визуального дешифрования изображения приведены в [4]. Эффективность визуального дешифрирования изображений, получаемых с помощью аэрофотографических, телевизионных, лазерных, инфракрасных и радиолокационных средств, может быть существенно повышена при согласовании характеристик изображения с соответствующими характеристиками зрительного анализатора оператора. Человек около 90 % всей информации получает через зрительный анализатор. Возможности зрительного восприятия изображений определяются энергетическими, пространственными и временными характеристиками зрительного анализатора [4].
К энергетическим характеристикам зрительного анализатора относятся: диапазон воспринимаемых яркостей, пороговые значения контраста и цветоощущение. Яркость является одной из основных характеристик изображения и определяется яркостью экрана системы отображения и яркостью внешней засветки, которая зависит от уровня внешней освещенности экрана. Эта характеристика изображения не влияет непосредственно на информативность восприятия, однако от яркости изображения существенным образом зависят значения характеристик зрительного анализатора оператора (пороговый контраст, разрешающая способность, время адаптации и др.), определяющие эффективность дешифрирования.
К пространственным характеристикам зрительного анализатора относятся: разрешающая способность (или острота зрения), поле зрения и объем зрительного восприятия. Разрешающая способность характеризует возможность зрительного анализатора воспринимать мелкие детали на изображении. Она обычно определяется минимальным угловым расстоянием между наблюдаемыми раздельно элементами изображения специальных тест-объектов (мир). Острота зрения оценивается величиной, обратной разрешающей способности. Разрешающая способность (острота) зрения изменяется в значительных пределах при изменении яркости и контраста наблюдаемых изображений.
Временные характеристики зрительного анализатора в значительной степени определяют его пропускную способность. К временным характеристикам относятся: латентный (скрытый) период зрительной реакции, длительность инерции ощущения, критическая частота мельканий, время адаптации и длительность информационного поиска [4].
Методический подход к тренировке навыков летных экипажей авиационных комплексов ...
Эффективность работы операторов-дешифровщиков существенным образом зависит от времени (длительности) поиска отметок объектов на изображении . В процессе поиска глаза оператора совершают саккадические движения (быстрые скачки), при которых зрительная информация не воспринимается. Скачки завершаются зрительной фиксацией на особенностях (информационных фрагментах) изображения. Средняя длительность фиксаций зависит от характера поисковых задач, количества и качества априорных данных, а также от детальности и углового размера изображения. Зависимость среднего времени фиксаций от характера решаемой задачи [4] приведена в Таблице.
Зависимость среднего времени фиксаций от характера решаемой задачи
|
№ п/п |
Характер задачи, решаемый оператором |
Среднее время фиксаций, с |
|
1 |
Поиск простых по форме фигур на изображении |
0,18…0,2 |
|
2 |
Распознавание двоичных сигналов |
0,25 |
|
3 |
Поиск отметок на радиолокационном изображении |
0,37 |
|
4 |
Поиск и распознавание по форме объектов на изображении |
0,83 |
|
5 |
Выполнение бомбометания |
1,27…1,8 |
|
6 |
Сопровождение целей по экрану РЛС |
0,475 |
|
7 |
Ориентировка и выполнение навигационных задач |
0,45 |
Определение основных параметров зрения, от которых зависит визуальный поиск, влияние каждого из них на обнаружение объекта рассмотрены в работах [2–4].
При визуальном наблюдении существенную роль играет вероятность Р обнаружения объекта как функция времени поиска t [3; 4]:
P = f ( t ).
Вероятность обнаружения объекта, то есть вероятность успешного окончания поиска, определяется шестью основными факторами, характеризующими условия наблюдения [3]:
-
• угловым размером объекта γ;
-
• контрастом объекта с фоном К;
-
• яркостью фона L ;
-
• угловым размером поля обзора 2β;
-
• временем поиска t ;
-
• угловой скоростью движения объекта ω (неподвижный объект можно рассматривать как частный случай движущегося объекта со скоростью ω = 0).
Из проведенных исследований [3] следует, что время обнаружения объекта будет случайной величиной, изменяющейся весьма значительно и поэтому подлежащей анализу по законам теории вероятностей, что требует большого статистического материала. Необходимость получения большого статистического материала для конкретного анализа зависимости P = f ( t ) объясняется еще и тем, что время t , обеспечивающее некоторую вероятность Р , может существенно изменяться у одного и того же оператора в зависимости от опыта вследствие случайных причин и тренировки.
Выявленная зависимость вероятности обнаружения от времени поиска представлена на Рисунке 1 и может быть выражена формулой [3; 4]
P = 1 - e - 2 1
где 2 = 1/ 1 .
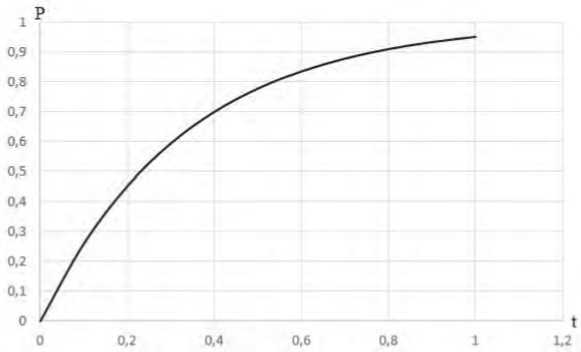
Рисунок 1. Зависимость вероятности обнаружения от времени поиска
Теоретически среднее время обнаружения должно соответствовать вероятности обнаружения 0, 63 [3].
Среднее время обнаружения t рассчитывается по формуле
- A (2 в ) 2
K2у3L0,3, где A - постоянная величина, не зависящая от параметров у, К, L, в, которую можно найти, переписав формулу (2) в виде
K 2 у 3 L 0,3 1 (2 в ) 2
A =
На практике более удобно для расчетов вместо А ввести обратную ей величину C [3] (плотность распределения величины С представлена на Рисунке 2):
Тогда формулу (1) можно записать как
1 = (2 в ) 2 A K 2 у3 L 0,3 1"
P = 1 - exp
CK 2 у 3 L 0,3 1 )
(2 в ) 2 J .
Классификация и характеристика опознавательных признаков
Классификация и характеристика опознавательных признаков объектов представлены в [2; 4].
Обнаружение и распознавание объектов ведется по совокупности априорно известных для каждого класса объектов опознавательных (разведывательных) признаков [2]. Признаки объектов, используемые при визуальном дешифрировании, иногда называют дешифровочными признаками. Все опознавательные признаки объектов можно разделить на две основные группы – прямые и косвенные.
Методический подход к тренировке навыков летных экипажей авиационных комплексов ...
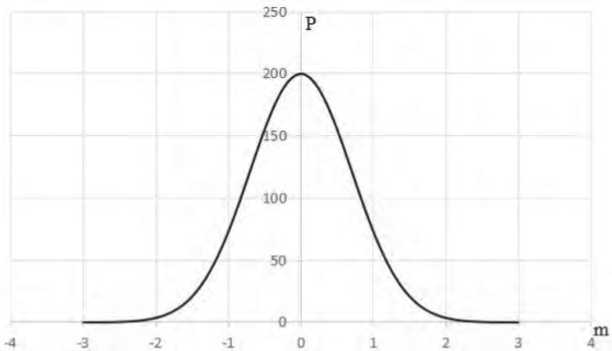
Рисунок 2. Плотность распределения величины С
Прямые опознавательные признаки присущи самим объектам и связаны непосредственно с объектами. К ним относятся геометрические, оптические и другие характеристики объектов: размер, форма, общий фон, текстура, температура поверхности и др.
Одним из важнейших прямых опознавательных признаков объектов является форма (конфигурация) объекта. Форма объекта характеризует его внешний вид, наружные очертания, объемность и детали объекта. На Рисунках 3, 4 представлены характерные признаки типовых целей «танк» и «грузовик» [2].
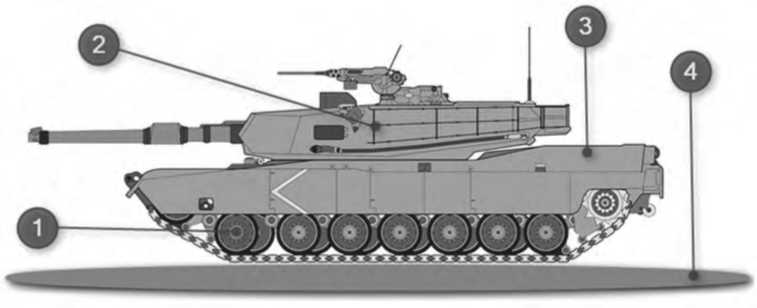
Рисунок 3. Характерные признаки типовой цели «танк»: 1 – ходовая часть; 2 – различие башни и корпуса; 3 – корпус; 4 – общий фон
Форма объекта, если она не искажена искусственно (при маскировке), является одним из информативных признаков, так как в большинстве случаев находится в соответствии с содержанием и назначением объекта [4]. При визуализации данных (на экранах систем отображения) форма объектов передается границами между участками с различной яркостью контурами, точность воспроизведения которых определяется в основном детальностью получаемых изображений. Как показывает практика визуального дешифрирования визуальных данных, в общем случае для распознавания объекта по форме на его площади должно укладываться от нескольких десятков до нескольких сотен, а при сложной форме – тысяч элементов разрешения. Недостатком данного опознавательного признака является его зависимость от ракурса и угла места наблюдения объектов.
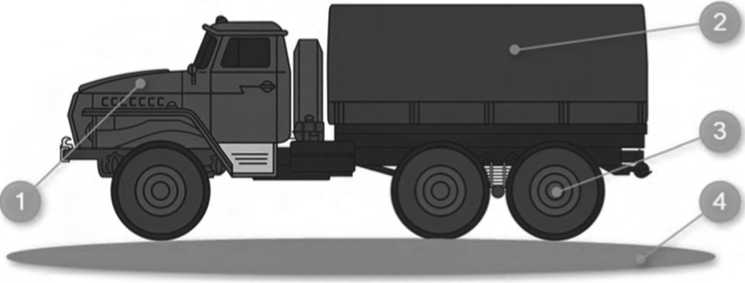
Рисунок 4. Характерные признаки типовой цели «грузовик»: 1 – двигательная часть; 2 – кунг; 3 – ходовая часть; 4 – общий фон
При дешифрировании изображений форма объектов всегда сопоставляется с его размерами. Учет размера объекта позволяет различать объекты, сходные по форме, но отличающиеся по размерам (например, отличать истребитель от бомбардировщика, эсминец от крейсера).
Информативным прямым признаком является текстура объекта, являющаяся в известной мере комплексным опознавательным признаком, отражающим размер, форму, взаимное расположение слагающих объект элементов (см. Рисунки 3, 4), их оптические свойства и освещенность, фактуру поверхности.
Косвенные опознавательные признаки не связаны непосредственно с объектами разведки, но они несут в себе информацию об объекте и его функциональном состоянии. К косвенным опознавательным признакам относятся: тень, следы деятельности, взаимное расположение объектов на местности, их расположение по отношению к элементам местности и др.
Тень от объекта может дать дополнительную информацию о форме и размерах объекта. Информативность этого признака достаточно велика особенно в случае наблюдения малоразмерных в плоскости наблюдения и замаскированных объектов.
Важным косвенным признаком является взаимное расположение объектов на местности: различные объекты, располагаясь на местности, находятся во взаимосвязи друг с другом в соответствия с их назначением и характером функционирования. Следовательно, наличие одних объектов обусловливает обязательное присутствие других, а вполне определенное расположение элементов сложного объекта на местности является его важным опознавательным признаком. Так, например, в позиционном районе ЗРК «Хок» обязательно наличие не только стартовых позиций для пусковых установок и технических позиций, но и позиций средств наведения и управления, которые располагаются определенным образом относительно стартовых и технических позиций и отстоят от них на определенном расстоянии [4].
Достаточно информативным опознавательным признаком объектов (особенно в условиях их маскировки и имитации) являются следы их деятельности: излучение работав-
Методический подход к тренировке навыков летных экипажей авиационных комплексов ...
ших радиоэлектронных средств (далее – РЭС), нагрев поверхности работавшей военной техники, выхлоп двигателей, кильватерная струя от движущейся в подводном положении подводной лодки и др. Следы деятельности объектов зачастую являются единственным признаком, по которому обнаруживаются и распознаются объекты, а также определяется их функциональное состояние.
По степени сложности описания опознавательные признаки объектов можно разделить на простые и сложные [2; 4]. К простым относятся опознавательные признаки объектов, которые могут быть описаны одной численно измеряемой величиной: температура поверхности, размеры, площадь объекта в плоскости наблюдения и др. Сложные опознавательные признаки можно описать только совокупностью числовых величин или некоторой функциональной зависимостью: форма, текстура объекта, взаимное расположение объектов и др. Сложные опознавательные признаки вносят основной информационный вклад в процесс обнаружения и распознавания объектов.
Успешное обнаружение и распознавание объектов достигается лишь при учете возможно большего числа опознавательных признаков. Причем в зависимости от характера объектов, степени их маскировки, условий их расположения на местности, времени суток и погоды информативность тех или иных признаков объектов будет различной.
Особенности тренировочного процесса операторов
Тренировка операторов в процессе поиска объектов проявляется, во-первых, в упорядочении поиска и уменьшении движений глаз, головы и туловища оператора, что можно установить при наблюдении за поведением его в процессе поиска объекта; во-вторых, в повышении остроты зрения и расширении границ периферического зрения; в-третьих, в выработке более быстрой реакции на появление объекта. Визуальные методы поиска и опознавания объектов требуют специальной подготовки операторов и методов оценки их поисковых способностей как при их отборе, так и в процессе тренировки по обнаружению и опознаванию неподвижных и движущихся с различными угловыми скоростями объектов разных размеров и контрастов.
Для тренировки навыков летных экипажей авиационных комплексов по обнаружению и распознаванию типовых целей оптико-электронными головками самонаведения авиационных средств поражения класса «воздух – поверхность» предлагается следующая методика, позволяющая проводить оценку поисковой способности операторов и эффективности тренировки.
В качестве объектов обнаружения и распознавания должны быть:
-
• объекты, относящиеся к подклассу типа «танк» – реальные танки и другие боевые машины на танковом шасси, состоящие на вооружении сухопутных войск;
-
• объекты, не относящиеся к подклассу типа «танк», – бронетранспортеры и другие боевые машины на колесном шасси, состоящие на вооружении сухопутных войск,
-
• военные грузовые и специальные автомобили типа ЗиЛ-130, «Урал». Общее число привлекаемых объектов наблюдения должно быть не менее трех.
Объекты на местности размещаются в соответствии со схемой проведения обучения, представленной на Рисунке 5.
На Рисунке 6 представлена схема проведения летной тренировки.
Схема мишенной обстановки при проведении обучения представлена на Рисунках 7, а (день) и 7, б (ночь).
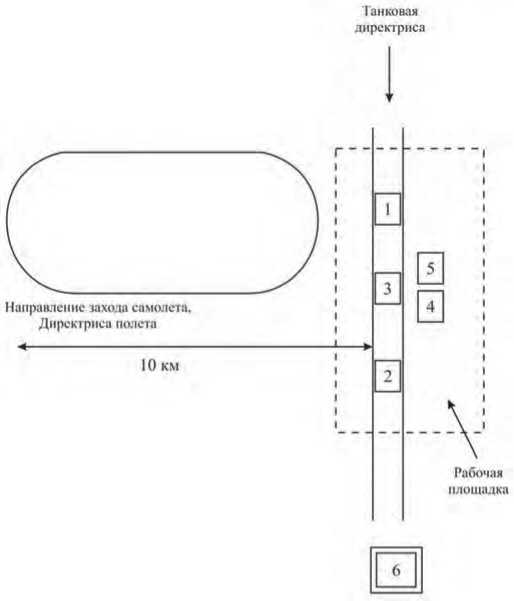
Рисунок 5. Схема проведения обучения: 1 , 2 – зоны предъявления целей (с целями); 3 – ориентир; 4 – танковый тягач; 5 – автомобиль с радиометром, яркомером; 6 – пункт управления
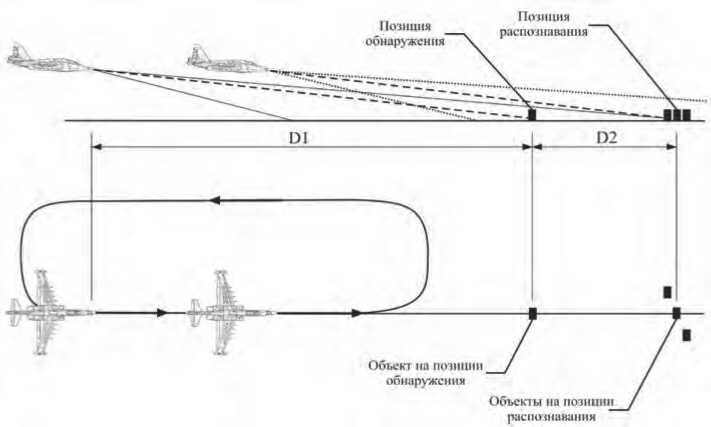
Рисунок 6. Схема проведения летной тренировки
Методический подход к тренировке навыков летных экипажей авиационных комплексов ...
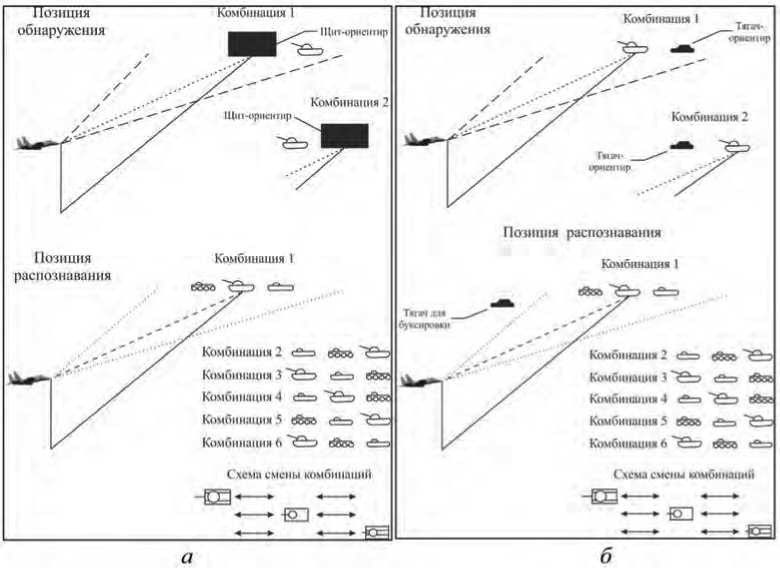
Рисунок 7. Схема мишенной обстановки: а – день; б – ночь
Обнаружение и распознавание цели осуществляется летчиком по экрану многофункционального индикатора (далее – МФИ ) при удержании им линии визирования (далее – ЛВ) в заданном направлении полета на цель.
Кроме того, перед началом летного эксперимента координаты цели вводятся в прицельно-навигационный комплекс, и в процессе полета производится их счисление и отображение на МФИ.
Временные затраты на поиск цели посредством сканирования ЛВ головки самонаведения (далее – ГСН) в данных экспериментах должны быть исключены.
Должно быть исключено закрытие цели складками местности (препятствиями) при наблюдении ее летчиком с направлений захода на удалении до 10 км. Высота полета выбирается с учетом обстановки и реальных условий боевого применения.
Заходы на цель осуществляются последовательно по кругу в соответствии с прилагаемыми схемой (см. Рисунок 6).
Для перемещения объектов по полигону в ходе выполнения процесса обучения (без запуска их двигателей с целью сохранения нормированного по технической документации теплового контраста объектов с подстилающей поверхностью земли) необходим танковый или автомобильный тягач, оснащенный сцепным устройством.
Методика подготовки летного состава
Методика подготовки летного состава к проведению тренировки по обнаружению и распознаванию цели типа «танк» с использованием оптико-электронных ГСН состоит из трех последовательных этапов.
Первый этап включает теоретическое изучение особенностей конструкции, технических характеристик и функционирования оптико-электронных ГСН в различных режимах применения УАСП и условиях полета. На первом этапе подготовки летный экипаж должен быть ознакомлен с физическими принципами получения изображения теплоконтрастной цели на экране МФИ, особенностями воспринимаемой закабинной обстановки, критериями и признаками, характеризующими теплоконтрастную цель (танк, БТР, автомобиль, искусственное сооружение). Кроме того, летчик (штурман) должен быть ознакомлен с видеозаписями по наблюдению различных теплоконтрастных целей, полученных по тепловизионному каналу на других оптико-электронных ГСН. На данном этапе возможно использование различной литературы, например [1].
Летный экипаж должен быть ознакомлен с типовыми признаками всех объектов наблюдений, участвующих при обучении, по которым возможно распознавание цели на ее принадлежность к определенному подклассу.
Летчик (штурман, оператор) при распознавании не должен ограничиваться только приведенными типовыми признаками, а дополнять данный перечень и собственными в процессе обучения.
Летчик (штурман, оператор) должен быть обучен кратким названиям типовых признаков распознавания и понимать обязательную необходимость регистрации признака распознавания для последующей обработки результатов тренировки.
После изучения вышеописанного раздела летчик (штурман, оператор) приступает к изучению информационно-управляющего поля кабины, с помощью которого осуществляется реализация заложенных возможностей ГСН.
Целью первого этапа подготовки летчика является достижение практических знаний конструкции, технических характеристик, критериев и отличительных признаков теплоконтрастной цели, воспринимаемой через экран МФИ, а также алгоритма действий на этапах поиска, обнаружения и распознавания теплоконтрастной цели.
Второй этап методики подготовки летчика к выполнению полетов по обнаружению и распознаванию типовой теплоконтрастной цели производится на аэродроме или специально подготовленной площадке, оборудованной стационарными средствами электропитания переменным током.
Место стоянки самолета (вертолета) должно обеспечивать ориентацию самолета в безопасном направлении с возможностью наблюдения на этих курсовых углах на дальности от летательного аппарата не менее 400 м характерных нежилых объектов, позволяющих отражать лазерное излучение дальномера авиационного комплекса.
После ориентации самолета в безопасное направление летчик занимает свое рабочее место и отрабатывает последовательность включения бортового оборудования без включения бортового и наземного электропитания. Закрепив теоретические знания практическими тренажами на летательном аппарате, летчик (штурман, оператор) дает команду на подключение наземного источника питания и в последовательности, определенной Руководством по летной эксплуатации, включает прицельно-навигационный комплекс и УАСП. Убедившись в исправности их работы, летный экипаж приступает к реализации алгоритма поиска цели в безопасном секторе с оценкой моментов обнаружения и распознавания теплоконтрастных целей.
Выполнение поиска, обнаружения и распознавания типовой теплоконтрастной цели осуществляется следующим образом. Поиск производится методом тепловизионного
Методический подход к тренировке навыков летных экипажей авиационных комплексов ...
сканирования в секторе, определяемом тактико-техническими характеристиками ГСН от заданного направления на цель.
Угловая скорость перемещения линии визирования как техническая характеристика в данном случае очень важна для летчика, так как при чрезмерном ее увеличении возможно «смазывание» теплового образа цели.
Летчик (штурман, оператор) должен подобрать такую угловую скорость перемещения линии визирования ГСН, которая, с одной стороны, не приводила бы к смазыванию тепловизионного изображения, а с другой – обеспечивала оперативное сканирование подстилающей поверхности в пределах углов «прокачки» ЛВ тепловизионного (телевизионного) канала. После отработки навыков по перемещению ЛВ с приемлемой постоянной угловой скоростью можно приступить к отработке алгоритма наведения ЛВ на теплоконтрастную цель.
Отработав навыки по перемещению ЛВ и наведению ее на теплоконтрастную цель, переходят к отработке алгоритма действий синформационно-управляющим полем (далее – ИУП) кабины на этапах поиска, обнаружения и распознавания в следующей последовательности:
-
• подобрать яркость и контрастность тепловизионного изображения для наблюдаемой на ИПВ местности;
-
• провести тепловизионное сканирование с определенной угловой скоростью участка местности, находящегося в пределах углов ±15° от заданного;
-
• при обнаружении (привлекшего внимание по характерным признакам) теплоконтрастного объекта на экране МФИ навести ЛВ на него и замерить с помощью дальномера авиационного комплекса дальность до обнаруженного объекта;
-
• провести распознавание объекта.
Летчик должен научиться выполнять заход на цель таким образом, чтобы она была в пределах поля зрения с расстояния не менее 8 км до момента правильного распознавания цели.
Действия оператора по работе с информационно-управляющим полем кабины самолета должны быть отработаны до автоматизма и позволять выполнять все операции при слабом внутреннем подсвете приборных досок.
Третий этап является завершающим этапом подготовки, его цель – приобретение практических навыков в полетах по поиску, обнаружению и распознаванию теплоконтрастных целей на местности по изображению на экране МФИ с применением ГСН УАСП.
Полеты по третьему этапу выполняются в комплексе с дневными и ночными полетами по программе боевой подготовки в объеме не менее 1 полета в разное время суток – днем, вечером (в сумерках) и ночью с реализацией 8–10 заходов на цель в каждом полете.
Отработка алгоритма действий летчика по поиску, обнаружению и распознаванию теплоконтрастной цели, выбранной в районе учебных полетов, производится в диапазоне высот 500–7000 м.
Цель полетов третьего этапа считается достигнутой, если летчик:
-
• безопасно выполняет заданные режимы полета;
-
• правильно определяет моменты обнаружения и распознавания;
-
• без перерегулирования наводит линию визирования на цель и определяет дальность до нее;
-
• отработал алгоритм действий и распределение внимания на этапе боевого применения и составляющих его режимах.
Тренировка операторов проводится по специальной программе в течение нескольких дней. В процессе тренировки время поиска объектов сокращается и достигает определенного для каждого наблюдателя минимума.
Для оценки поисковой способности отдельных операторов, как и всей системы «оптический прибор плюс глаз в целом», следует выбрать либо среднее время обнаружения объекта, либо величину коэффициента С , характеризующую индивидуальные способности оператора. Время обнаружения записывается, а затем усредняется. Если оценка поисковой способности определяется по среднему времени поиска определенного (стандартного) объекта, то лучше тот оператор, у которого время поиска меньше; если оценка осуществляется по коэффициенту С , то чем больше значение С , тем лучше наблюдатель. Коэффициент С определяется по формуле (4). Все величины, входящие в эту формулу, известны заранее, так как задаются при проведении эксперимента, среднее время поиска определяется экспериментально. Для каждого оператора определяется начальный уровень навыков, уровень после тренировок, которые сравниваются с расчетными. Данные зависимости представляются в виде графиков (см. Рисунки 1, 2).
Ограничения применения методики
-
1. Не следует использовать значения контраста объекта меньше 2 %. Для обнаружения объекта необходимо, чтобы контраст объекта был больше порогового контраста для данных условий наблюдения.
-
2. При расчете углового размера объекта следует учитывать только видимый размер, учитывать ракурс и направленность освещения.
-
3. Не следует использовать в расчетах значения яркости, превышающие 500 кд/м2.
-
4. Угловой размер объекта должен быть больше 1′.
-
5. Среднее (расчетное) время обнаружения должно быть больше 2 с.
-
6. Значение вероятности обнаружения должно быть больше 0,1.
-
7. Параметры объекта (угловые размеры, контраст с фоном) не меняются в процессе поиска.
-
8. Местоположение объекта равновероятно по всей площади поля обзора.
Выводы
Применение представленного подхода к тренировке обнаружения и распознавания типовых наземных целей оптико-электронными (телевизионными и тепловизионными) ГСН УАСП класса «воздух – поверхность» летными экипажами авиационных комплексов позволит:
-
• осуществлять начальное обучение операторов и восстановление навыков поиска после длительного перерыва в работе;
-
• повысить натренированность летных экипажей (операторов расчетов БЛА) по распознаванию типовых наземных целей («танк», «БТР», «грузовой автомобиль»);
-
• сократить время поиска, обнаружения и распознавания типовых наземных целей («танк», «БТР», «грузовой автомобиль») в тепловизионном и телевизионном диапазонах в 2–4 раза [3];
-
• обучать летные экипажи авиационных комплексов как самолетного, так и вертолетного типа, операторов ударных беспилотных комплексов;
-
• уменьшить время нахождения авиационных комплексов в зоне действия ПВО противника в момент выполнения боевой задачи по поражению наземных объектов.
Методический подход к тренировке навыков летных экипажей авиационных комплексов ...
Список литературы Методический подход к тренировке навыков летных экипажей авиационных комплексов по обнаружению и распознаванию типовых целей оптико-электронными радиолокационными головками самонаведения управляемых авиационных средств поражения класса «воздух - поверхность»
- Мирошников И.И., Коновальцев Э.В., Хлонь Е.П. Авиационное оборудование самолета Су-30СМ // Межвузовский сборник научных трудов. 2020. С. 143-148.
- Молчанов А.С. Теория и практика распознавания объектов бронетанковой техники при дешифрировании аэроснимков. М.: Перо, 2021. 248 с.
- Травникова Н.П. Эффективность визуального поиска. М.: Машиностроение, 1985. 128 с.
- Школьный Л.А. Радиоэлектронные комплексы воздушной разведки. М.: ВВИА имени Н.Е. Жуковского, 1985. 275 с.
