Методика функциональной унификации адаптивного модуля гидропривода с функцией стабилизации нагрузки на рабочем органе мобильных машин

Автор: Першин В.А., Хиникадзе Т.А.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 3 т.18, 2018 года.
Бесплатный доступ
Введение. Исследованы вопросы функциональной унификации адаптивного модуля гидропривода. Впервые рассмотрены принципы самоадаптации с учетом внутренних адаптивных связей управления нагрузкой и согласованности движений на рабочем органе мобильных машин.Цель работы — создание и анализ методики функциональной унификации адаптивного модуля гидропривода. Для достижения поставленной цели решен ряд задач. Обоснован выбор технических устройств — унифицируемых адаптивных модулей гидропривода мобильных машин. Предложены методика и показатели функциональной унификации модуля. Рассмотрены внутренние связи: прямая положительная и обратная отрицательная. Показано их влияние на свойство функциональной унификации адаптивного модуля.Материалы и методы. Для синтеза и анализа показателей функциональной унификации адаптивного модуля принят метод подобия функционирования технических систем.Результаты исследования. Разработана методика проведения конструктивно-функциональной унификации модулей с самоадаптацией. Показаны возможные варианты модификации унифицируемых модулей и соответствующие им сочетания гидродвигателей, регулирующей аппаратуры и математических моделей адаптивных связей. Предложены критерии и индикаторы подобия. Выполнен анализ функциональной унификации внутренних адаптивных связей модуля с разными типами гидродвигателей и элементов дросселирования жидкости в гидросистеме. Сформулированы рекомендации проведения функциональной унификации при типизации и эксплуатации (наладке) адаптивного модуля.Обсуждение и заключения. Методика рекомендована для функциональной унификации гидравлического модуля с самоадаптацией. Она может использоваться при разработке типоразмеров модуля и в процессе его эксплуатации в качестве автономного привода или подсистемы гидропривода многофункциональной или комбинированной машины.
Функциональная унификация, типизация, гидропривод, типовой унифицированный модуль с самоадаптацией, метод подобия функционирования, мобильные машины
Короткий адрес: https://sciup.org/142214958
IDR: 142214958 | DOI: 10.23947/1992-5980-2018-18-3-318-325
Technique of functional unification of adaptive hydraulic drive module capable of load stabilization on the working body of mobile machines
Introduction. Issues on the functional unification of the adaptive hydraulic drive module are studied. For the first time, self-adapting mechanisms are considered taking into account adaptive intercommunication of the load control and agreement of motions on the working body of the mobile machines. The work objective is to create and analyze the technique of the functional unification of the adaptive hydraulic drive module. In the furtherance of this goal, a number of tasks are solved. The selection of technical equipment – unified adaptive hydraulic drive modules of the mobile machines – is validated. The methodology and indicators of the module functional unification are described. Intercommunications are considered: direct positive and back negative ones. Their effect on the functional unification property of the adaptive module is shown.Materials and Methods. For the synthesis and analysis of the functional unification indicators of the adaptive module, a similarity method of the technical systems operation is adopted.Research Results. Techniques for structural-functional unification of the self-adapting modules are developed. Optional versions of the unified modules modification and proper combinations of hydraulic motors, regulating equipment, and mathematical models of adaptive communications are presented. Criteria and indicators of similarity are proposed. The functional unification of the adaptive intercommunications of the module and different types of the hydraulic motors and fluid throttling elements in the hydraulic system are analyzed. Recommendations for implementing the functional unification under typing and operation (adjustment) of the adaptive module are formulated.Discussion and Conclusions. The methodology is recommended for the functional unification of the hydraulic self-adapting module. It can be used for the development of unit sizes and under its operation as an independent drive or a hydraulic drive subsystem of a multifunctional or combined machine.
Текст научной статьи Методика функциональной унификации адаптивного модуля гидропривода с функцией стабилизации нагрузки на рабочем органе мобильных машин
Введение. Многофункциональные и комбинированные мобильные машины активно используются в сложных условиях: при выполнении дорожно-строительных и сельскохозяйственных работ. Как правило, их эксплуатация предполагает ручное или жестко запрограммированное управление. Таким образом, актуально создание простых функционально унифицированных приводов (модулей) мобильных машин, способных адаптироваться к переменным свойствам обрабатываемой среды [1].
Следует отметить, что вопросы унификации связаны с решением ряда научно-практических задач. Одна из них — проблема типоразмеров функционально унифицированных изделий. Для ее решения используется соответствующий аппарат фундаментальной [2] и прикладной [3, 4, 5] математики. Проводятся исследования адаптивных систем различной структуры и назначения [6], гидроприводов устройств с адаптивно согласованными движениями рабочего органа, воспринимающего стохастические переменные нагрузки [7, 8, 9, 10]. В рамках данной работы рассматривается принцип функциональной унификации в гидроприводе модульного типа с функцией самоадаптации по нагрузке. Исследование и практическое испытание такого модуля проводятся впервые.
Материалы и методы. В качестве базовых объектов исследования приняты устройство для бурения породы с переменными свойствами [11] и устройство для обработки криволинейных поверхностей [12] (рис. 1, 2).
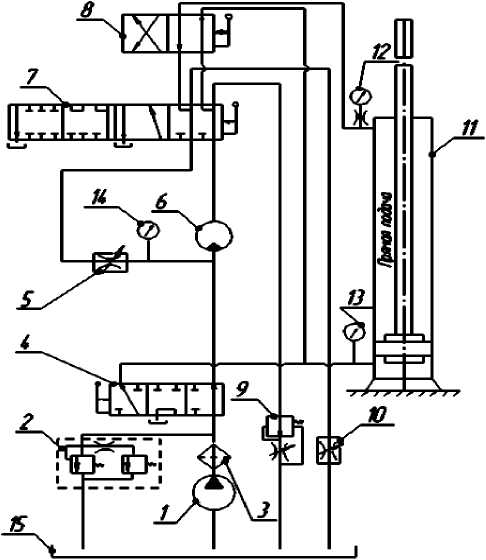
Рис. 1. Принципиальная схема устройства для бурения породы с переменными свойствами [3]
Машиностроение и машиноведение
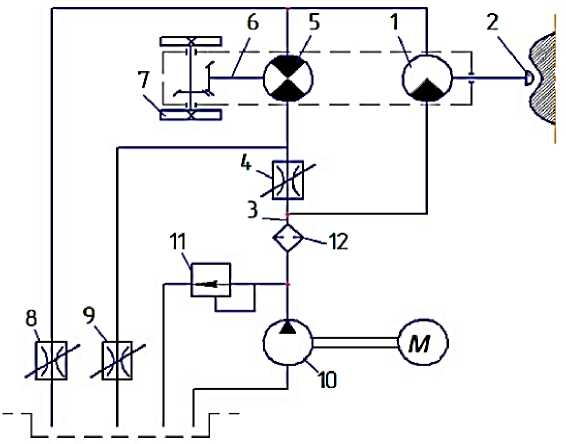
Рис. 2. Принципиальная схема устройства для обработки криволинейных поверхностей [2]
На представленных схемах пронумерованы следующие элементы (для рис. 2 обозначения даны в скобках): 1 (10) — гидронасос постоянной производительности; 2 (11) — предохранительный клапан; 3 (12) — фильтр; 4, 7, 8 — гидрораспределители; 5 (4) — дроссель (регулятор режимов); 6 (1) — гидромотор главного движения; 9 — регулятор потока; 10 — подпорный регулируемый дроссель; 11 — гидроцилиндр подачи; 12, 13, 14 — манометры; 15 — бак; (2) — рабочий орган; (3) — гидросистема; (5) — реверсируемый гидромотор подачи; (6) — вал гидромотора подачи; (7) — механизм подачи; (8, 9) — регулируемые дроссели.
Элементы гидросистемы этих устройств (в том числе их модификации [13]) структурно объединены по дифференциальной схеме.
Между сливными линиями регулятора режимов и гидромотора главного движения дополнительно включены гидроцилиндр (рис. 1) или гидромотор (рис. 2). Таким образом устанавливаются две связи: обратная отрицательная и прямая положительная.
На сливной линии гидромотора главного движения рассматриваемого устройства для бурения находится регулятор потока (рис. 1). На сливной линии гидромотора главного движения устройства для обработки криволинейных поверхностей находится регулируемый дроссель (рис. 2). В этом состоит принципиальное отличие данных устройств.
Такие вариации унифицированных модулей позволяют обеспечить сочетание движений рабочего органа мобильной машины: вращение — подача; вращение — вращение; подача — подача [14].
Конструктивные отличия влияют на характеристики прямой положительной и обратной отрицательной связей устройств, одновременно унифицированных и модульных (табл. 1, 2).
Таблица 1
Функциональные зависимости адаптивных связей модуля с регулятором потока
|
Типы гидродвигателей модуля |
Функции адаптивных связей модуля |
|
|
Обратная отрицательная |
Прямая положительная |
|
|
Гидромотор главного движения — гидромотор подачи |
ш гп = AM o - (ВМ сгд + СМ сдп ) |
^ гп = — 1 ^ гд |
|
Гидромотор главного движения — гидроцилиндр подачи |
ш гп = AM o — (ВМ сгд + СМ сдп ) |
v цп = — 2 ^ гд |
|
Гидроцилиндр главного движения — гидроцилиндр подачи |
У цп = AM o - (ВМ сгд + СМ сцп ) |
v цп = ^- 3 v цп |
Таблица 2
|
Типы гидродвигателей модуля |
Функции адаптивных связей модуля |
|
|
Обратная отрицательная |
Прямая положительная |
|
|
Гидромотор главного движения — гидромотор подачи |
Ю гп = АМ0 - (ВМ сгд + СМ сдп ) |
— _ ^Р8 / 2А ^ дР8 ^ гп — к 1 ^ гд Ц г п / цп ^ р |
|
Гидромотор главного движения — гидроцилиндр подачи |
Ю гп = АМ о - (ВМ сгд + С^ сдп ) |
— _ ^8 / 21 ^ дР8 ^ цп к 2 ^ гд Ц г In / цп ^ р |
|
Гидроцилиндр главного движения — гидроцилиндр подачи |
Р цп = АМ о - (В^ гд + СТ сцп ) |
„ - Ъ „ _ ^8 / 2ДР др8 ^ цп — к 3 ^ цгд Ц Р / цп ^ р |
Отметим, что соотношение скоростей выходных элементов гидродвигателей (см. табл. 2) не зависит от
Функциональные зависимости адаптивных связей модуля с регулируемым дросселем
расхода через регулятор потока, так как этот показатель не зависит от перепада давления на аппарате, т. е. Q рп = const .
Адаптивные связи играют особую роль при действии рабочих органов машин в режимах с требуемыми показателями скорости выполнения операций и устойчивости [14]. Рассмотренные выше конструктивнофункциональные особенности устройств (наличие регулируемого дросселя или регулятора потока) позволяют реализовать такие связи.
В таблице 1 и 2 приняты условные обозначения: 17 цп — скорость штока; / цп — площадь поперечного сечения гидроцилиндра подачи; ю гд — угловая скорость гидромотора главного движения; А, В, С — постоянные коэффициенты, зависящие от моментов инерции, кинематических параметров и КПД узлов привода главного движения и привода подачи модуля; М о — номинальный и расчетный суммарный момент сопротивления, соответствующий процессу обработки без адаптации; / др8 — площадь проходного сечения дросселя Др8; М сгд , М сдп — действительные моменты сопротивления, воспринимаемые соответственно валом привода главного движения и валом подачи; Е сгд , Е сцп — действительные усилия сопротивления, воспринимаемые соответственно штоком гидроцилиндров главного движения и цилиндра подачи; 1.Р др8 — перепад давления на дросселе Др8; р — плотность рабочей среды в гидросистеме (масло); к 1 ,к 2 ,к 3 — коэффициенты перевода конструктивных особенностей и размерностей скоростей движений.
Отрицательная обратная связь позволяет в процессе работы модуля стабилизировать действительный суммарный момент (усилие) сопротивления на рабочем органе. В этом случае автоматически сравниваются: — действительный момент сопротивления со значением, заданным регулятором режимов;
-
— изменения скоростей подачи и главного движения со знаком, обратным сигналу рассогласования.
Ниже приводятся соответствующие уравнения обратной связи по ускорениям вала гидромотора подачи.
При наличии регулятора потока:
Ф гп = к сгп [ А
±^(ВДМ°д+ СЛМ ° Д п ) (ВДМ с°д + СДМс 0дп ) 0'5
При наличии регулируемого дросселя:
Ф гп
-^[(А ксгп
±^(ВДМ 0гд + СДМ 0дп ) (ВДМ ”д + СДМ с0дп ) 0'5
£
+ Ц дР3 / Р3 dt ^
2(аР Дрз ± 8(ДР °рз ),
Р
■)] .
Методика проведения функциональной унификации определяется ее целями и особенностями, а также этапом жизненного цикла модуля. Вместе с тем следует отметить и общие шаги ее реализации:
-
— уточнение функционального назначения и условий функционирования унифицируемого модуля;
-
— предварительный сбор данных в рамках конструктивной и функциональной унификации гидроаппаратов типового и унифицируемого модуля (в том числе условий однозначности; номинальных и граничных значений параметров функционирования, особенно перепадов давлений на гидроаппаратах в условиях динамического равновесия гидросистемы);
-
— уточнение вида адаптивных связей по конструктивным особенностям модулей (в соответствии с табл. 1 и 2).
Машиностроение и машиноведение
При соблюдении отмеченных общих положений функциональная унификация адаптивных связей выполняется в определенной последовательности.
— Расчетом или по техническому заданию, паспорту уточняют значения рабочих (или максимальных) нагрузок на рабочем органе мобильной машины с унифицируемым модулем.
— В соотношении с типовым модулем определяют функциональные и конструктивные значения параметров элементов гидросистемы унифицируемого модуля. При этом используются номограммы, графики или расчеты (например, методом подобия функционирования) [15].
Результаты исследования. При выполнении унификации используется принцип суперпозиции функций.
Кратко рассмотрим пример методики проведения функциональной унификации гидродвигателей гидросистемы модуля.
Выходными характеристиками гидромотора и гидроцилиндра являются угловая скорость (частота вращения) и момент на валу гидромотора, линейная скорость и усилие на штоке гидроцилиндра. Функциональные зависимости, определяющие эти характеристики, имеют вид [16]:
-
а) для гидромотора
М м = f 1 ( P ex ,q, в ,J,M mp , ^ P ym ( Q ym f Р )), n = /.AQ.q, и ,E,Q ym ( A P ym /, p ));
-
б) для гидроцилиндра
V ш = f l ( Q d, 5 , Р , AP ц ,E,V v ), F ш = / 2 ( AP ц , A F n ,m nd ,F cmp , ц ^0).
Здесь пм — частота вращения вала; q — объем масла; Q — расход (подача) масла; Е — модуль упругости; ц — динамическая вязкость масла; р — плотность масла; Рвх — давление на входе; АРут — перепад давления на элементе утечек; Qут — величина утечек; /щ — площадь щели, через которую проходит утечка; J — момент инерции; в — коэффициент сжатия масла; Fстр, Fвт — приведенные силы страгивания и внутреннего трения в гидроцилиндре; r — радиус вращения масс; £, v — конструктивные коэффициенты; Мв — момент на валу; Мтр — момент трения; АРц — перепад давления на гидроцилиндре; Fш — усилие на штоке; АFп — разность усилий на поршне.
При проведении конструктивно-функциональной унификации используют частные критерии подобия унификации [17], полученные методом анализа размерностей [15].
Для гидромотора критерии подобия унификации имеют вид:
п n = -Qf1'5 ; п q = Qqf1'5 ; п E = |P; пР=в P ’ (5) = Мтр Р3 . =AP . _ /ц Р2 . Мтр p Г3 ; p ;j J2 ; вх J вх J = Qcц0'33 = Р q°'67 пQc p0'33 ; пpc P 0'33 0'67 . Pн q P н µ
Критерии подобия унификации имеют определенный функциональный или конструктивный смысл, а именно: пn — критерий расходно-кинематических параметров; пq — критерий, характеризующий соотношение конструктивных и расходных (функциональных характеристик); пЕ — критерий, характеризующий номинальную жесткость рабочей жидкости; пц — критерий теоретического (индикаторного) момента на валу насоса; пр — критерий упругой деформации рабочей жидкости; пМт — критерий потерь на трение в сопряжениях; пJ — критерий потерь на инерционное, гидромеханическое сопротивление; пQ — критерий потерь на гидродинамическое сопротивление рабочей жидкости; пP — критерий потерь на преодоление утечек рабочей жидкости; п— критерий потерь на внутреннее (вязкое) сопротивление рабочей среды.
Таким образом, каждый критерий отражает сущность одного из свойств функциональной унификации модуля, а любая система критериев отражает это свойство обобщенно.
Обобщенные критерии подобия унификации, полученные путем объединения частных критериев, представляются в виде:
π м π Pв π щ Pq 0 , 67 rJN тр Q ρ - 1 Qf рэ f y 2 E Δ P y
Mг = в ; nг =π n π q πνπ E π y
π E π r π y π NT π Q πρ Pв µ Efy q y q 2 ν P ρ Qy
Соответствующие частные индикаторы подобия функциональной унификации C i , получают из уравнений (5) для унифицируемого и типового модулей [15]. При этом должны быть равны соответственные числа подобия π yi и π т i для типового и унифицируемого модулей:
πyi = π т i = idem. (7)
В рассматриваемом примере частные индикаторы подобия функциональной унификации имеют вид:
-
1 - ^C. is ; 1 - ^ Cf i,s ; 1 - -^ ; 1 = CrCp ; 1 = С Мтр С р! ;
C q Г ц C q / ц С др P Р вх pBx; 3 ’
= СМ™р3 ; 1 = ^ = C^te = £2.^
.
С Рвх С /з’ Р вх’ P^q C q2 C p
Так же, как и критерии подобия функциональной унификации, частные индикаторы можно объединять в комплексы, получая эффект суперпозиции.
Изменение масштаба параметров Ci унифицируемого модуля в индикаторах (8) по отношению к аналогичным параметрам индикаторов типового модуля должно соответствовать условию равенства единице [15]. Например, для выходной характеристики ДРгм по индикатору
1 = _Со_С Д£гм C q2 С р
можно исследовать функциональную унификацию по перепаду давления, характерному (рабочему) объему и расходу гидромотора, плотности масла.
Искомый типоразмер одного из параметров унифицируемого модуля определяется подстановкой в (5) и (8) известных значений параметров гидромотора типового модуля и априори известных (установленных техническим заданием и т. п.) значений параметров унифицируемого модуля.
Особенности процедуры исследования функциональной унификации зависят от поставленной задачи. При проведении унификации модуля нового типоразмера сначала выполняют конструктивно-функциональную унификацию, выбор типоразмеров элементов гидросистемы и затем проводят проверку их функционального соответствия внутренним адаптивным связям. Для решения первой задачи используются частные критерии и индикаторы подобия функциональной унификации. Для решения второй задачи используются обобщенные критерии, индикаторы, а также уравнения прямой и обратной адаптивных связей.
Другими задачами унификации адаптивного модуля являются: исследование причин нарушения функциональной унификации в процессе эксплуатации одного и того же адаптивного модуля, а также исследование эффективности функциональной унификации при модернизации адаптивного модуля гидропривода. При этом также может быть использован метод подобия функционирования технических систем [18], [19].
Машиностроение и машиноведение
Обсуждение и заключения. Обоснована актуальность разработки и применения в мобильных машинах унифицированного гидропривода модульного типа. Данная конструкция позволяет адаптировать силовые и кинематические параметры при воздействии на рабочий орган переменных нагрузок. Методика проведения конструктивно-функциональной унификации модулей с самоадаптацией предполагает использование математических моделей адаптивных связей. Показаны возможные варианты модификации унифицируемых модулей с самоадаптацией и соответствующие им сочетания гидродвигателей, регулирующей аппаратуры и математических моделей адаптивных связей. Приводится пример методики проведения функциональной унификации с использованием метода подобия функционирования технических систем. Методика рекомендована для исследования функциональной унификации при разработке типоразмеров и в процессе эксплуатации предложенного типа модуля.
Список литературы Методика функциональной унификации адаптивного модуля гидропривода с функцией стабилизации нагрузки на рабочем органе мобильных машин
- Янсон, Р. А. Системная унификация самоходных строительных машин/Р. А. Янсон. -Москва:Изд-во Мос. гос. строит. ун-та, 2005. -95 с.
- Латыев, С. М. Конструирование точных (оптических) приборов/С. М. Латыев. -Санкт-Петербург: Политехника, 2007. -580 с.
- Унификация изделий. Основные положения: ГОСТ 23945.0-80/Межгосударственный Совет по стандартизации, метрологии и сертификации. -Москва: Стандартинформ, 1980. -Режим доступа: http://www.internet-law.ru/gosts/gost/14244 (дата обращения: 02.02.18).
- Бабаян, Г. Г. Модульный принцип унификации в построении структуры автоматических роторно-конвейерных линий/Г. Г. Бабаян, А. С. Дегоян, И. Р. Овакимян. -Режим доступа: http://elib.sci.am/2000_2/04/04r.htm (дата обращения 02.02.18).
- Юревич, Е. И. Основы робототехники/Е. И. Юревич. -Санкт-Петербург: БХВ, 2005. -416 с.
- Жмудь, В. А. Адаптивные системы автоматического управления с единственным основным контуром/В. А. Жмудь//Автоматика и программная инженерия. -2014. -№ 2 (8). -С. 106-122.
- Гинзбург, А. А. Критерии выбора параметров исполнительных органов гидроприводов с адаптацией к нагрузке/А. А. Гинзбург, В. В. Пинчук//Вестник ГГТУ им. П. О. Сухого. -2007. -№ 3 (30). -С. 38-44.
- Некрашевич, К. Я. Математическая модель гидросистемы, реализованной с применением комбинированного принципа адаптации к нагрузке/К. Я. Некрашевич//Механика машин, механизмов и материалов. -2014. -№ 1 (26) -С. 21-31.
- Першин, В. А. Повышение качества процесса хонингования цилиндров ДВС путем стабилизации его силовых и адаптации кинематических параметров/В. А. Першин, С. Г. Соловьев//Прогрессивные технологии в транспортных системах: сб. докл. IX Рос. науч.-практ. конф. -Оренбург, 2009. -С. 267-270.
- Першин, В. А. Адаптивный модуль гидропривода буровой установки/В. А. Першин, С. Г. Соловьев, И. К. Гугуев//Изв. высш. учеб. заведений. Сев.-Кавказ. регион. -2015. -№ 1. -С. 102-106.
- Способ бурения породы с переменными свойствами и устройство для его осуществления: патент № 2582691 Рос. Федерация: E21B 44/00/В. А. Першин. -№ 2015112959/03; заявл. 08.04.15; опубл. 27.04.16, Бюл. № 12. -2 с.
- Устройство для стабилизации толщины снимаемого слоя при механической обработке криволинейных поверхностей: а. с. № 483224 СССР: 23q 5/06, B24b 5/16/А. Н. Дровников, Г. М. Водяник, В. А. Першин. -№ 2018478/25-8 4; заявл. 19.04.74; опубл. 05.09.75, Бюл. № 33. -4 с.
- Способ интенсификации процесса резания: а. с. № 929331 СССР: B 23 B 1/00/В. И. Толубец. -№ 2789053/25-08; заявл. 04.07.79; опубл. 23.05.82, Бюл. № 19. -4 с.
- Исследование устойчивости адаптивного модуля гидропривода оборудования для механической обработки материалов/Т. А. Хиникадзе и//Теоретические и практические аспекты развития современной науки: мат-лы ХVIII междунар. конф. -Москва: ЦНИК, 2015. -С. 12-17.
- Хиникадзе, Т. А. Исследование соответствия характеристик адаптивного модуля гидропривода технологическим параметрам машин/Т. А. Хиникадзе//Молодой исследователь Дона. -2018. -№ 2 (11). -С. 107-112.
- Першин, В. А. Методология подобия функционирования технических систем/В. А. Першин. -Новочеркасск: УПЦ «Набла» ЮРГТУ (НПИ); Шахты: Изд-во ЮРГУЭС. -2004. -227 с.
- Першин, В. А Модели формирования и управления техническим состоянием гидропривода транспортных машин/В. А. Першин, И. К. Гугуев, С. С. Прискоко//Политранспортные системы: мат-лы VI Всерос. науч.-техн. конф. -Новосибирск: Изд-во СГУСПС, 2009. -426 с.
- Хиникадзе, Т. А. Исследование показателей функциональной унификации технических систем на принципах подобия функционирования/Т. А. Хиникадзе, В. А. Першин//Современные проблемы науки, технологий и инновационной деятельности: сб. науч. тр. междунар. науч.-практ. конф. 31 августа 2017 года/Под общ. ред. Е. П. Ткачевой. -Белгород: АПНИ, 2017. -Ч. I. -С. 112-117.
- Pershin, V. A. Similarity of Functioning Technical Systems as the Condition Support of Effectiveness in the Process of their Life Cycle/V. A. Pershin//Europäische Fachhochschulle. European Applied Sciences. -2013. -№ 12. -Р. 87-89.
- Bulgakow, A. Criteria of Taking Decisions at Machinery in Conditions of the Construction Plant/A. Bulgakow, A. Drownikow, V. Pershin.//19th International Symposium on Automation Technical Operation of Building and Robotics in Construction. -Washington: U.S. Government printing office, 2002. -P. 103-107.
