Методика исследования поведения космических аппаратов на различных этапах эксплуатации с использованием трехмерного динамического моделирования

Автор: Романов Андрей Васильевич, Егоров В.В.
Журнал: Космические аппараты и технологии.
Рубрика: Космонавтика
Статья в выпуске: 1 (3), 2013 года.
Бесплатный доступ
Рассмотрена оценка механических и динамических характеристик космического аппарата (КА) методом трехмерного динамического моделирования. Для этого использован программный комплекс MSC.Software MD Adams. Полученная оценка может быть использована для решения большого круга задач как в ракетно-космической отрасли, так и в смежных с ней областях.
Динамические характеристики ка, трехмерное моделирование, программный комплекс
Короткий адрес: https://sciup.org/14117284
IDR: 14117284 | УДК: 629.7.018.4
Methods of conduct study on the different stages of operation using three-dimensional dynamic modeling
We have considered the assessment of mechanical and dynamic characteristics of the spacecraft (SC) with the method of three-dimensional dynamic modeling. For this purpose we have used software package MSC Software MD Adams. Received assessment can be used to solve a wide range of problems both in the space industry and related areas.
Текст научной статьи Методика исследования поведения космических аппаратов на различных этапах эксплуатации с использованием трехмерного динамического моделирования
1При разработке КА возникает необходимость в создании методик, которые могли бы адекватно оценить его будущие механические свойства и динамические характеристики. Предварительная оценка будущих свойств и характеристик составных элементов и самого КА в целом позволяет значительно сократить сроки разработки и материальные затраты, связанные с производством.
Одним из способов оценки механических свойств и динамических характеристик
является метод трехмерного динамического моделирования. Согласно этому методу строится трехмерная динамическая модель, механические свойства и динамические характеристики которой отражают аналогичные параметры будущего проектируемого изделия. После проведения исследования динамической модели полученные результаты используются для прогнозирования характеристик реального изделия.
Для динамического моделирования представляется целесообразным использовать вычислительные возможности современных
ЭВМ и пакетов программ для моделирования динамики механических систем. При этом функционал выбираемого программного обеспечения должен удовлетворять требованиям поставленной задачи.
С помощью вышеописанного метода динамического моделирования было выполнено три различных расчета поведения КА, каждый из которых соответствовал определенному этапу его эксплуатации:
– расчет текущих и конечн ы х углов и уг ловых скоростей центра масс КА, сил и моментов сил в шарнирах крепления внешних элементов конструкции, изменяющихся в процессе их раскрытия;
– расчет собственных частот корпуса КА и его внешних элементов, динамического прогиба на этапе транспортирования;
– расчет перемещения контрольных точек конструкции КА, вызванных внешними и внутренними воздействующими факторами, на этапе его штатной эксплуатации.
Процесс раскрытия внешних элементов конструкции КА, разворачивающихся из транспортного положения в рабочее, происходит на орбите Земли, после отделения от ракетоносителя и перед началом штатной эксплуатации КА. В процессе раскрытия внешних элементов КА меняются его характеристики: геометрическая форма, ориентация в пространстве, угловая скорость вращения, положение центра масс, моменты инерции главных осей. Также в процессе раскрытия возникают силы и моменты реакции в шарнирах самих раскрывающихся элементов. От результата процесса приведения внешних элементов КА в рабочее положение зависит возможность его дальнейшей эксплуатации.
В качестве исходных данных для построения трехмерной динамической модели были использованы следующие характеристики центрального тела КА и каждого из его внешних раскрывающихся элементов:
– масса;
– массовые моменты инерции (три главных момента);
– положение центра масс;
– моменты инерции сечения (два главных и крутильный моменты);
– коэффициент рассеяния (логарифмический декремент затухания колебаний);
– упруго-диссипативные характеристики узлов крепления внешних раскрывающихся элементов;
– уравнение движения привода, раскрывающего внешний элемент;
– циклограм м а ( п о с ледовате л ьность) раскрытия внешних элементов.
При выборе пакета программного обеспечения необходимо иметь в виду, что проектируемая динамическая модель должна иметь изменяемую геометрию, причем эти изменения должны выполняться по определенному, заранее заданному закону. Этому требованию отвечает программный комплекс MSC. Software MD Adams [1], предназначенный для 27 проведения расчетов и исследования динамики системы.
В программном комплексе MSC. Software MD Adams была пос т роен а динамическая модель, состоящая из совокупности абсолютно жестких тел, соединённых между собой упруго-диссипативными связями балочного типа, имеющими определенные характеристики (крутильный и два основных момента инерции сечения, коэффициент рассеяния). Каждое абсолютно жесткое тело обладает определенными массово-инерционноцентровочными характеристиками (массой, массовыми моментами инерции и положением центра масс).
Дополнительно в модели использованы следующие типы связей:
– имитатор закрепления – п оз воляет моделировать упруго-диссипативное закрепление двух элементов;
– шарнир вращения – соединяет два тела, оставляя одну вращательную степень свободы. Вращение может быть свободным или происходить согласно заранее заданному закону;
– кинематическ а я связь типа «ползун» – соединяет два тела, оставляя одну поступательную степень свободы. Поступательное движение может быть свободным или происходить согласно заранее заданному закону.
Количество использованных в модели элементов приведено в табл. 1.
Схематичное изображение динамической модели КА (с полностью раскрытыми внешними элементами его конструкции) приведено на рис. 1.
На рис. 2 ( а – з ) изображены различные формы динамической модели в процессе раскрытия:
a – модель находится в транспортном положении;
ИССЛЕДОВАНИЯ
HAVKO____________
Ограда
-
б – раскрыты пакеты солнечных батарей;
-
в – солнечные батареи приведены в рабочее положение;
-
г – штанги отвода рефлекторов приведены в рабочее положение;
-
д – антенные панели приведены в рабочее положение;
-
е – электромагнит сброса кинетического момента приведен в рабочее положение;
-
ж - облучатели приведены в рабочее положение;
з - рефлекторы приведены в рабочее положение.
После построения динамической модели, задания всех уравнений движения ее раскрываемых элементов и проведения исследования модели в программном комплексе MSC.Software MD Adams был получен требуемый результат –
Таблица 1
Количество элементов, использованных при построении динамической модели
|
Тип конечного элемента |
Количество элементов |
|
|
Элементы (parts) |
Абсолютно жесткое тело (rigid body) |
667 |
|
Шарниры (joints) |
Шарнир вращения (revolute joint) |
17 |
|
Ползун (translational joint) |
2 |
|
|
Законы движения (motions) |
Вращательное движение (rotational motion) |
13 |
|
Силы (forces) |
Имитатор закрепления с определенной жесткостью (bushing) |
27 |
|
Безмассовая балка (massless beam) |
682 |
|
Примечание: в скобках приведены английские (оригинальные) названия типов конечных элементов, использованных в программном комплексе MSC.Software MD Adams.
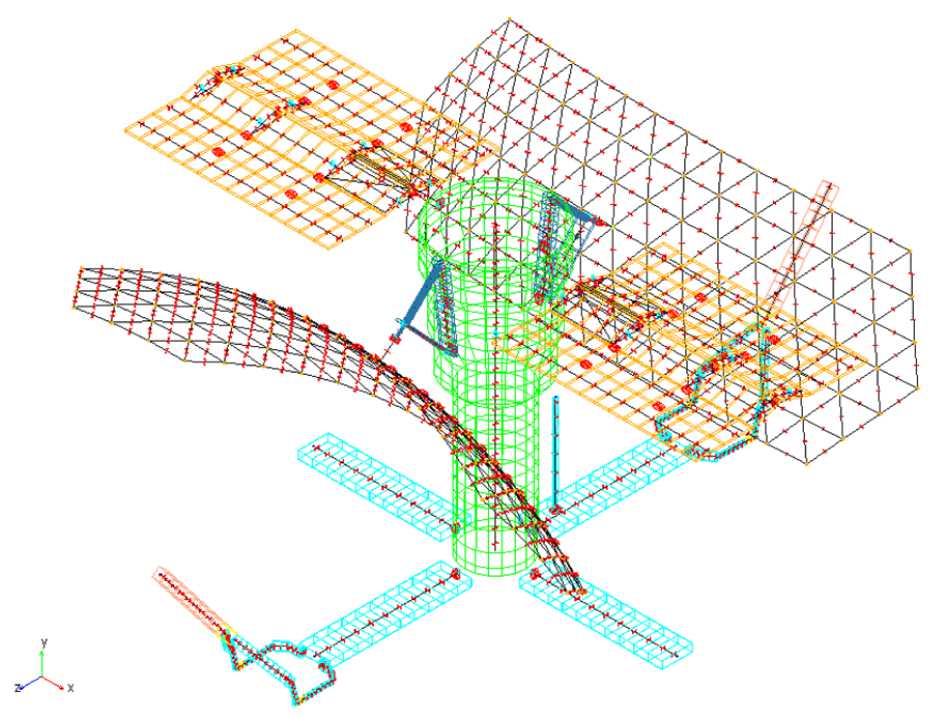
Рис. 1. Схематичное изображение динамической модели КА (с полностью раскрытыми внешними элементами его конструкции)
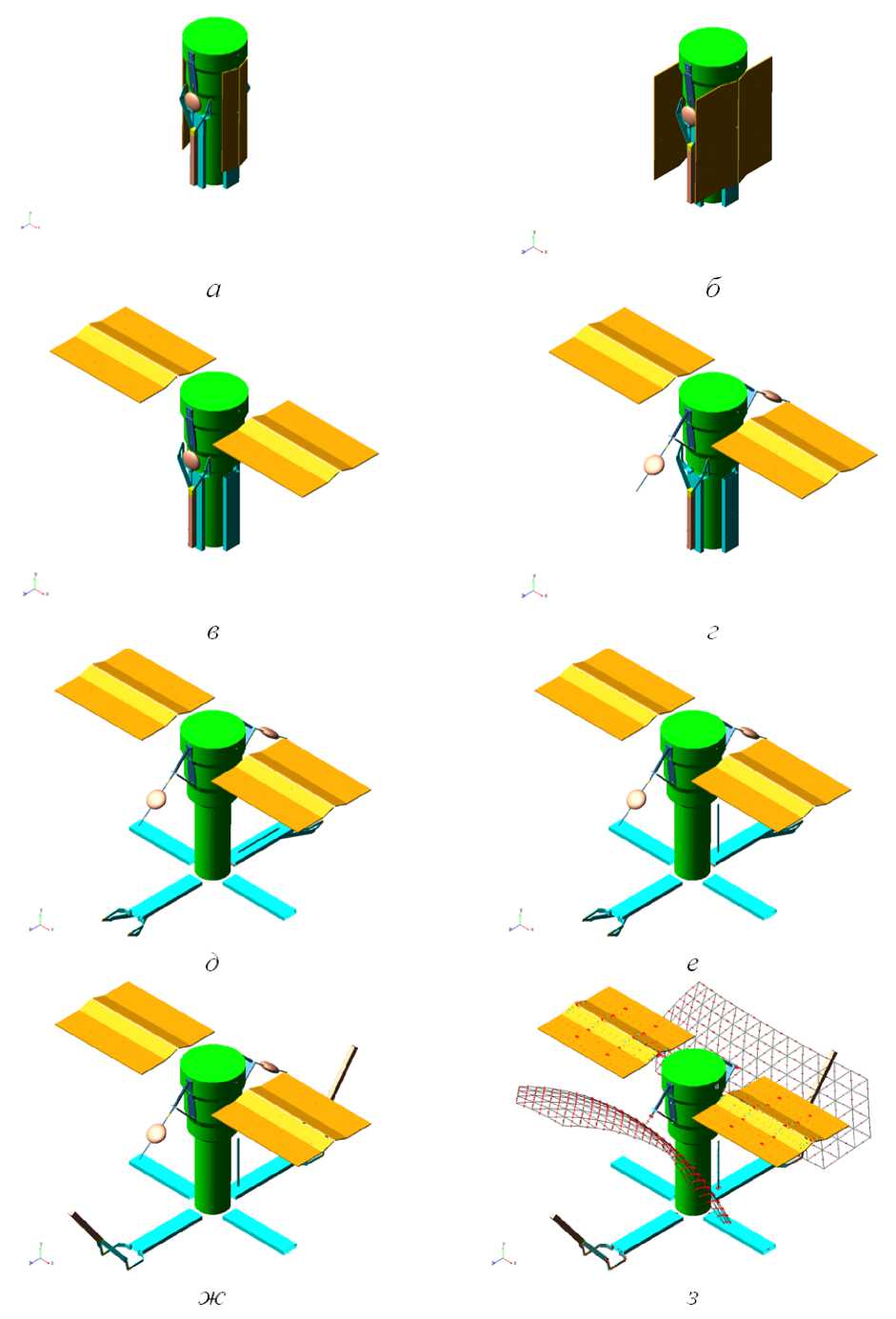
Рис. 2. Различные формы динамической модели в процессе раскрытия
ИССЛЕДОВАНИЯ
Список литературы Методика исследования поведения космических аппаратов на различных этапах эксплуатации с использованием трехмерного динамического моделирования
- Иванов А. А. MSC.ADAMS: теория и элементы виртуального конструирования и моделирования: учеб. пособие. М.: Московское представительство MSC.Software GmbH, 2003. 97 с.
