Методика оценки помехоустойчивости перспективного навигационного приемника ГНСС беспилотного летательного аппарата

Автор: Коровин А.В., Миронов В.А., Новиков А.А., Трущинский А.Ю., Фатеев Ю.Л.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 8 т.9, 2016 года.
Бесплатный доступ
На основе синтезированных ранее авторами алгоритмов работы каналов первичной обработки навигационного приемника, моделей помех и навигационных сигналов разработана методика и проведены исследования помехоустойчивости каналов задержки и частоты мультисистемного многоканального навигационного приемника глобальных навигационных спутниковых систем, выполняющего одновременный прием и первичную обработку разных типов навигационных сигналов. В качестве показателей помехоустойчивости определены вероятность и среднее время до срыва слежения за навигационным сигналом.
Глобальная навигационная спутниковая система, навигационная аппаратура потребителя, вероятность срыва слежения за навигационным сигналом, среднее время до срыва слежения за навигационным сигналом
Короткий адрес: https://sciup.org/146115150
IDR: 146115150 | УДК: 629.396 | DOI: 10.17516/1999-494X-2016-9-8-1162-1171
The noise stability estimating method of perspective navigation receiver GNSS un-manned aerial vehicle
On the basis of previously synthesized by the authors primary processing channels GPS re-ceiver algorithms, interference and navigation signals models, developed methodology and con-ducted noise studies of channel delay and frequency multi-system navigation receiver global navi-gation satellite systems, performs simultaneous reception and initial processing of different types of navigation signals. As indicators of noise immunity the probability and mean time before tracking the navigation signal.
Текст научной статьи Методика оценки помехоустойчивости перспективного навигационного приемника ГНСС беспилотного летательного аппарата
-
1 . Вероятность срыва слежения за навигационным сигналом.
-
2 . Среднее время до срыва слежения за навигационным сигналом.
Входные параметры предлагаемой методики:
-
– математические модели навигационных сигналов (фазоманипулированный двоичной псевдослучайной последовательностью сигнал ( BPSK - binary phase shift keying) и перспективный фазоманипулированный двоичной псевдослучайной последовательностью сигнал c дополнительной меандровой модуляцией ( BOC – binary offset carrier);
– математическая модель помехи (частотно-модулированная шумом (ЧМШ) помеха (белый гауссовский шум (БГШ).
Основные допущения и ограничения в данной методике:
-
- поляризация навигационных сигналов производится ортогональными тригонометрическими функциями;
-
– навигационные сигналы излучаются на одной несущей частоте;
-
– рассогласование опорного и принятого сигналов принималось равным нулю;
-
– мощность сигнала на входе цифровой модели приемника задавалась на уровне -160 dB;
-
– не учитывались потери на распространение радиоволн в пространстве;
-
- ширина спектра помехового сигнала на несущей частоте навигационных сигналов задавалась 5, 10, 15 МГц, на поднесущей частоте навигационных сигналов задавалась соответственно 5 и 2,5 МГц.
Схемотехнические и программные решения при построении современных навигационных приемников позволяют обрабатывать все доступные навигационные сигналы – принцип AllinView, благодаря увеличению количества каналов приема и применению цифровой обработки сигнала непосредственно на несущей частоте. В связи с этим нет необходимости в изменении конструкции НАП ГНСС, достаточно лишь переустановить программное обеспечение. Но следует отметить, что существующий методический аппарат построения НАП ГНСС ориентирован на алгоритмы первичной обработки отдельных навигационных сигналов и не учитывает возможность одновременной совместной обработки разных типов существующих и перспективных навигационных сигналов ГНСС [1, 5–7].
Основные математические соотношения методики
В связи с тем что при излучении навигационных сигналов BPSK и BOC используется модуляция ортогональными тригонометрическими функциями несущей частоты, появляется возможность проводить их совместную первичную обработку. На рис. 1 приведены спектральные плотности мощности навигационных сигналов BPSK, BOC и помехи.
Таким образом, на вход цифровых моделей [1, 5–7] мультисистемного многоканального приемника НАП подавалась аддитивная смесь сигнала и помехи вида
У ft) = У bpsk ft) + У boc ft) + nO) , (1)
где n(t) - ЧМШ (БГШ).
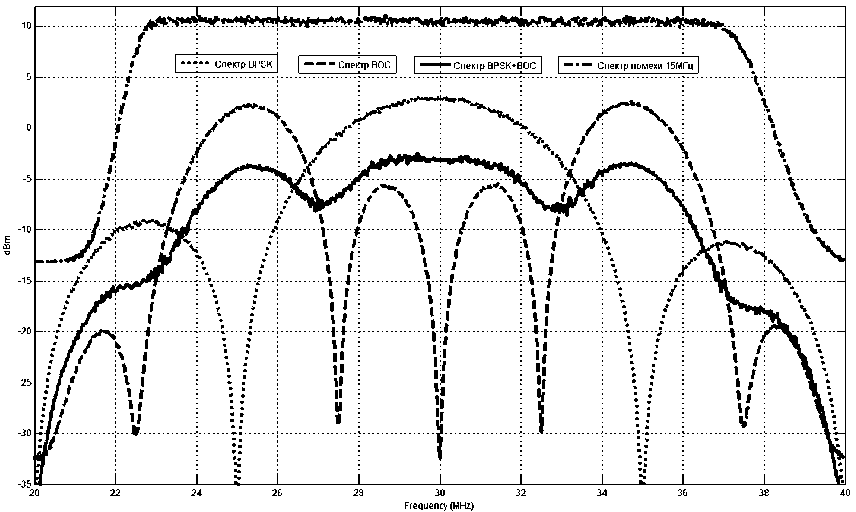
Рис. 1. Спектральные плотности мощности навигационных сигналов и помехи
Напряжения на выходе дискриминаторов следящих систем при воздействии помехи согласно синтезированным алгоритмам работы временного и частотного дискриминаторов [1, 5–7] определяются следующими выражениями:
u Дτ BPSK ( BOC ) (tk )
Г2 + л2 - Г2+ а
V I E BPSK (BOC) + Q E BPSK (BOC) I E BPSK (BOC) + Q E BPSK (BOC)
ˆ2 ˆ2 ˆ2
IE BPSK (BOC) + QE BPSK (BOC) + IL BPSK + QL BPSK (BOC)
- , IE BPSK+QE BPSK+IE BOC+QE BOC - Iil BPSK+QE BPSK+IL BOC+QE BOC uˆДτBPSK+BOC(tk)= ˆ2 ˆ2 ˆ2 ˆ2 ˆ2 ˆ2 ˆ2
IE BPSK + QE BPSK +IEBOC+QEBOC + IL BPSK + QL BPSK +ILBOC+QLBOC
uˆ u ДωBPSK (BOC)
ˆ
(tk ) = I P BPSK ( B OC)
( k Q PBPSKBOC, ( k 1 ) I P BPSK ( B OC) ( k 1 ) QP BPSK ( B OC)
( k ) ,
йДю (чНрврзк ( k )Qpbря- k - 1) - IpB psA k ~ 1)Qpbpsk+ k ) + (5)
ДωBPSK+BOC k P BPSK P BPSK P BPSK P BPSK P BPSK
ˆ
+ IP BOC
(k)Qpboc(k -1)-Ipboc(k - 1)Qpboc (k), где I и Q - синфазные и квадратурные, несдвигаемые, опережающие и запаздывающие со- ставляющие при наличии помехи.
Подавая аддитивную смесь сигнала и помехи на вход модели приемника c псевдодоплеров-ским смещением частоты и рассогласованием сигнала и опорной последовательности, равной нулю, определяем флуктуационные характеристики каналов слежения за задержкой и частотой [8], которые описываются следующими соотношениями:
D T =M [ ( и Дт - u ( T - T ) ) 2 ] Lr = 0, τ
На рис. 2 и 3 представлены флуктуационные характеристики следящих систем за задержкой и частотой для ширины спектра помехи 5 МГц ( а ), 10 МГц ( б ), 15 МГц ( в ) соответственно.
Вычисленные дисперсии шума на выходе временных и частотных дискриминаторов согласно следующим выражениям:
D Шт = { u Дт -{ u Дт } }D шт = { u Дю— { u дт }2 }
сравниваются с пороговой (в случае нормирования с единицей), и принимается решение о срыве слежения за навигационным сигналом [1, 5, 6].
Вероятность срыва слежения за навигационным сигналом определяется методом ста тистических испытаний [9]:
P = i= 1
N
^(DШi - 1)
N
где N – количество испытаний.
Регистрирующее устройство моделей исследования оценивает вероятность срыва слежения для различных уровней сигнал-шум, зависимости которых изображены на рис. 4 и 5 соответственно для следящих систем за задержкой и частотой.
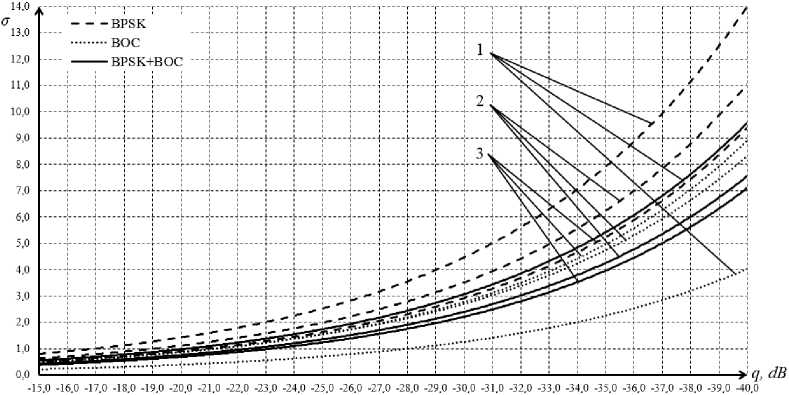
Рис. 2. Флуктуационные характеристики дискриминаторов задержки BPSK, ВОС навигационных сигналов для ширины спектра помехи: 1 – 5 МГц; 2 – 10 Мгц; 3 – 15 МГц
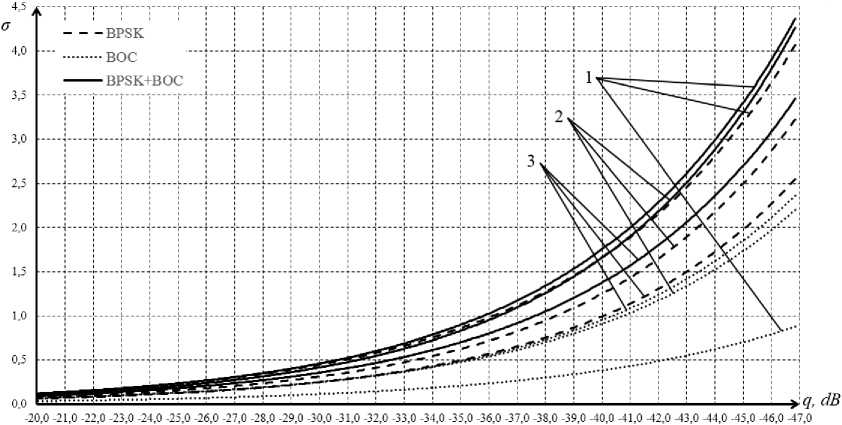
Рис. 3. Флуктуационные характеристики частотных дискриминаторов BPSK, ВОС навигационных сигналов для ширины спектра помехи: 1 – 5 МГц; 2 – 10 Мгц; 3 – 15 МГц
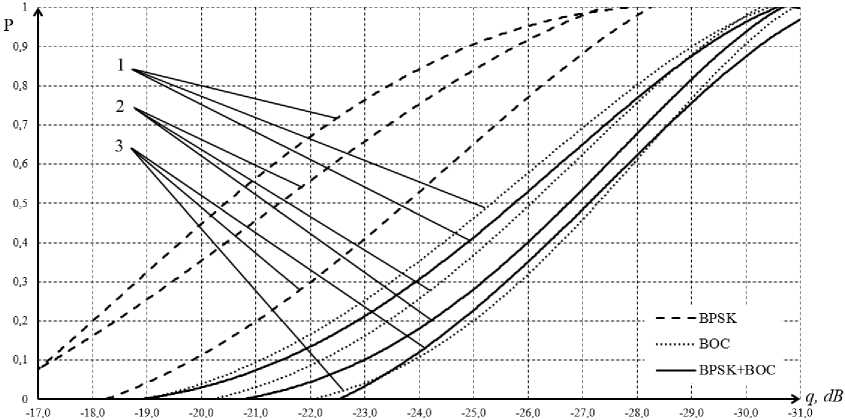
Рис. 4. Зависимости вероятности срыва слежения за BPSK, ВОС навигационными сигналами от отношения сигнал-шум на входе канала слежения за задержкой огибающей для ширины спектра помехи: 1 – 5 МГц; 2 – 10 Мгц; 3 – 15 МГц
Среднее время до срыва слежения за навигационным сигналом определяется как модельное время, в момент которого напряжение на выходе следящей системы при воздействии помехи превышало заданный уровень [10].
На выходе временного и частотного дискриминаторов модели навигационного приемника определяются отсчеты напряжения при воздействии шума и динамики движения объекта из расчета изменения задержки и частоты Доплера навигационного сигнала. Отсчеты напряже- – 1167 –
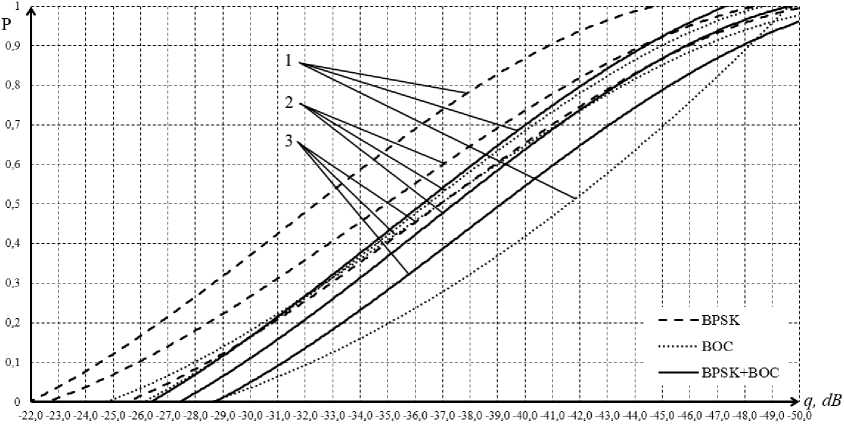
Рис. 5. Зависимости вероятности срыва слежения за BPSK, ВОС навигационными сигналами от отношения сигнал-шум на входе канала слежения за частотой для ширины спектра помехи: 1 – 5 МГц; 2 – 10 Мгц; 3 – 15 МГц ния на выходе следящей системы за задержкой и частотой сравниваются с порогом, который определяется из расчета максимального напряжения рассогласования на выходах временного и частотного дискриминаторов в пределах ширины апертуры раскрыва дискриминационной характеристики. В процессе расчетов модельное время жестко привязывается к реальному времени.
Выражение, описывающее среднее время до срыва слежения за навигационным сигналом, запишем в виде
N
А tk tcP = i=1—, (16)
ср N где tk - модельное время, в момент которого напряжение на выходе следящей системы при воздействии помехи превышает заданный порог в каждом из N опытов [9].
Таким образом, при превышении ошибки слежения заданного порога (к примеру, в нашем случае 30 м = ширине взлетно-посадочной полосы) принимается решение о модельном времени t k , при котором происходит срыв слежения за навигационным сигналом, жестко привязанному к реальному времени [10].
На рис. 6 и 7 приведены зависимости среднего времени до срыва слежения за навигационным сигналом от отношения сигнал-шум на входе объединённой следящей системы за задержкой и частотой для ширины спектра помехи 5 МГц ( а ), 10 МГц ( б ), 15 МГц (в ) на центральной частоте и для ширины спектра помехи 2,5 МГц ( г ) и 5 МГц ( д ) при воздействии на перспективный навигационный сигнал на поднесущей частоте.
Предложенные методики определения статистических характеристик помехоустойчиво -сти по показателям вероятности срыва слежения и среднего времени до срыва слежения за на-
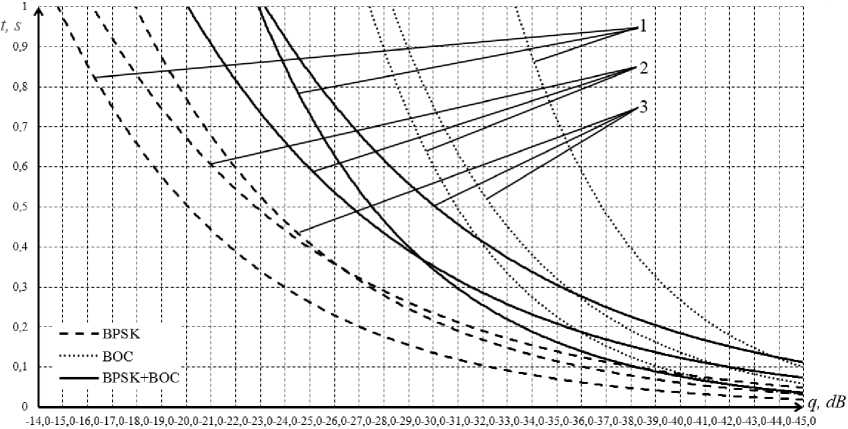
Рис. 6. Зависимости среднего времени срыва слежения за BPSK, ВОС навигационными сигналами на несущей частоте от отношения сигнал-шум на входе объединенного канала слежения для ширины спектра помехи: 1 – 5 МГц; 2 – 10 Мгц; 3 – 15 МГц
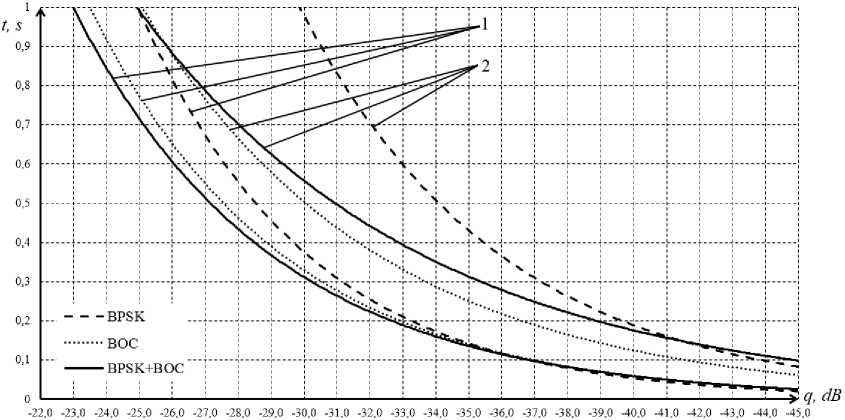
Рис. 7. Зависимости среднего времени срыва слежения за BPSK, ВОС навигационными сигналами на поднесущей частоте от отношения сигнал-шум на входе объединенного канала слежения для ширины спектра помехи: 1 – 5 МГц; 2 – 2,5 Мгц вигационным сигналом перспективной мультисистемной многоканальной НАП ГНСС и анализ приведенных выше зависимостей при воздействии ЧМШ помехи различной интенсивности и различной шириной спектра, соизмеримой с шириной спектра исследуемых навигационных сигналов, позволяют утверждать об увеличении помехоустойчивости перспективного навигационного приемника ГНСС на 3÷6 дБ [1, 2, 5, 6, 10], а соответственно, и боевой эффективности БНК БЛА при радиоэлектронном противодействии.
Список литературы Методика оценки помехоустойчивости перспективного навигационного приемника ГНСС беспилотного летательного аппарата
- Миронов В.А., Коровин А.В., Неровный В.В., Новиков А.А. Разработка и исследование математической модели каналов одновременного слежения за задержкой и частотой навигационного приемника ГНСС при совместной обработке разных типов навигационных сигналов в условиях помех. Сб. тр. ХIV Междунар. науч.-техн. конф. «Радиолокация, навигация, связь». Воронеж: ВГУ, 2014, 1035-1045
- Авдеев М.В., Журавлев А.В., Коровин А.В., Неровный В.В. Повышениепомехозащищенности навигационной аппаратуры потребителей спутниковых радионавигационных систем за счет совместной обработки различного типа навигационных сигналов. Сб. тр. XIV Междунар. науч.-техн. конф. «Радиолокация, навигация, связь». Воронеж: ВГУ, 2010, 1583-1589
- Ярлыков М.С., Богачев А.С., Меркулов В.И., Дрогалин В.В. Радиоэлектронные комплексы навигации, прицеливания и управления вооружением летательных аппаратов. Т. 1. Теоретическиеосновы/подред. М.С. Ярлыкова. М.: Радиотехника, 2012. 504 с.
- Васильев В.Н. Надежность комплексов авиационного радиоэлектронного оборудования. Надежность и техническая диагностика комплексов авиационного радиоэлектронного оборудования: В 3 ч. М.: ВВИА, 2003. Ч. 1. 95 с.
- Коровин А.В., Миронов В.А., Неровный В.В., Новиков А.А. Разработка и исследование помехоустойчивости модели канала совместного слежения за задержкой различного типа сигналоввнавигационнойаппаратурепотребителейглобальныхнавигационныхспутниковых систем. Электромагнитные волны и электронные системы, 2015, 2, 4-10
- Коровин А.В., Миронов В.А., Неровный В.В., Новиков А.А. Разработка и исследование частотных характеристик совместной обработки разных типов навигационных сигналов. Электромагнитные волны и электронные системы, 2015, 3, 11-16
- Коровин А.В., Миронов В.А., Новиков А.А., Рябков П.В., Трущинский А.Ю. Частотные дискриминаторы перспективных навигационных приемников ГНСС ГЛОНАСС для малых и больших отношений сигнал/шум. Теория и техника радиосвязи, 2015, 4, 71-78
- ГЛОНАСС. Принципы построения и функционирования/под ред. А.И. Перова, В.Н. Харисова. Изд. 4-е, перераб. и доп. М.: Радиотехника, 2010. 800 с.
- Тихонов В.И., Ефименко В.С., Журавлев А.Г. Статистическая теория радиоэлектронных систем/под ред. В.И. Тихонова. М.: ВАТУ, 2002. 758 с.
- Авдеев М.В., Журавлев А.В., Коровин А.В., Новиков А.А., Рябков П.В. Исследование помехоустойчивости перспективной НАП ГНСС ГЛОНАСС по показателю среднего времени до срыва слежения за частотой навигационного сигнала. Теория и техника радиосвязи, 2015, 4, 11-17
