Методика оценки системы управления авиационным вооружением в процессе наведения управляемых авиационных средств поражения, оснащенных оптико-электронными головками самонаведения

Автор: Аль Сафтли Фади Хайдар, Баланян Сергей Товмасович
Рубрика: Управление сложными системами
Статья в выпуске: 1, 2022 года.
Бесплатный доступ
Рассматривается повышение эффективности боевого применения управляемой авиационной ракеты класса «воздух - поверхность» по полученным целеуказаниям с беспилотного летательного аппарата, позволяющее на больших расстояниях автоматически решать задачи поиска, обнаружения и распознавания целей в условиях реального масштаба времени при сложной фоноцелевой обстановке в зоне боевых действий, тем самым уменьшая риск попадания самолета-носителя в зону действия ПВО противника. Разработана оптимизированная архитектура сверточной нейронной сети для сегментации изображений и распознавания наземных целей в оптико-электронной системе беспилотного летательного аппарата, а также разработанный алгоритм автоматического распознавания наземной цели искусственной нейронной сетью в телевизионной головке самонаведения управляемых авиационных средств поражения класса «воздух - поверхность». Проведено аналитическое сравнительное исследование по вероятности поражения наземной цели типа танка между разработанными алгоритмами автоматического распознавания наземной цели и использованием визуального (оптического) обнаружения и распознавания наземной цели летчиком (штурманом) при разных значениях средней интенсивности потока огневого воздействия ракет противовоздушной обороны противника. Осуществлена программная реализация алгоритмов автоматического распознавания наземной цели и обучения оптимизированной нейронной сети с использованием объектно ориентированного языка программирования Matlab.
Обнаружение, автоматическое распознавание, беспилотный летательный аппарат, наземная цель, сверточная нейронная сеть, управляемые авиационные средства поражения, система управления авиационным вооружением, вероятность распознавания, вероятность поражения
Короткий адрес: https://sciup.org/148323991
IDR: 148323991 | УДК: 623.465.7
Methodology for assessing the control system of aircraft weapons in the process of aiming controlled aircraft weapons equipped with opto-electronic homing heads
This article discusses the increase in the effectiveness of the combat use of an air-to-surface guided missile based on the received target designations from an unmanned aerial vehicle, which makes it possible to automatically solve the tasks of searching, detecting and recognizing targets in real time conditions at large distances in a complex background-target situation in the combat zone actions, thereby reducing the risk of the carrier aircraft falling into the enemy air defense coverage area. An optimized architecture of a convolutional neural network has been developed for image segmentation and ground target recognition in the optoelectronic system of an unmanned aerial vehicle, as well as an algorithm for automatic recognition of a ground target by an artificial neural network in a television homing head of controlled air-to-surface weapons. An analytical comparative study was carried out on the probability of hitting a ground target such as a tank between the developed algorithms for automatic recognition of a ground target and the use of visual (optical) detection and recognition of a ground target by a pilot (navigator) at different values of the average intensity of the flow of fire from enemy air defense missiles. The software implementation of algorithms for automatic recognition of a ground target and training of an optimized neural network using the object-oriented programming language Matlab has been implemented.
Текст научной статьи Методика оценки системы управления авиационным вооружением в процессе наведения управляемых авиационных средств поражения, оснащенных оптико-электронными головками самонаведения
Управляемые авиационные средства поражения (далее – УАСП) как оружие возникли и стали развиваться вследствие снижения эффективности неуправляемых авиационных средств поражения по мере улучшения тактико-технических характеристик воздушных и наземных целей, их помехозащищенности, бронезащиты, маскировки и совершенствования обороны. Развитие средств противовоздушной обороны (далее – ПВО) привело к необходимости увеличения дальности стрельбы, повышения скорости ударных самолетов и снижения высоты их полета до предельно малых высот.
Однако для обнаружения, распознавания и уничтожения наземной цели самолет-носитель вынужден входить в зону действия ПВО противника. Так как дальность действия средств ПВО постоянно возрастает и наведение на цель системы «оператор – ракета» с двусторонней линией передачи данных в недостаточной мере дает возможность оператору постоянно видеть цель через камеру ракеты и дистанционно управлять ею после пуска, что в конечном итоге приведет к невыполнению боевой задачи.
При наличии двусторонней линии передачи данных наведение осуществляется вплоть до поражения ракетой цели или до момента перевода телевизионной головки самонаведения (далее – ТВГСН) на автосопровождение цели конечного участка траектории полета ракеты. Данные ракеты с достаточно большой дальностью пуска и телевизионной системой наведения, могут применяться по сильнозащищенным и замаскированным целям, когда самолет-носитель может не входить в зону действия ПВО противника и выполнять операции обнаружения, распознавания и наведения на наиболее уязвимые места по данным целеуказания с беспилотного летательного аппарата (далее – БпЛА).
Актуальность исследования
Актуальность рассматриваемого вопроса заключается в том, что промежуток времени от момента обнаружения цели и до ее поражения слишком велик и состоит из времени подготовки самолета к вылету, времени полета в заданный район, времени выхода на цель, времени обнаружения, распознавания наземной цели, что существенно снижает возмож- ности по поражению объектов противника. Применение авиационных средств поражения по целеуказаниям с БпЛА существенно сократит время на обнаружение и распознавание наземной цели. Существующее алгоритмическое обеспечение не адаптировано к автоматическому решению задач поиска, обнаружения и распознавания целей в условиях реального масштаба времени и для сложной фоноцелевой обстановки.
Таким образом, оценка системы управления авиационным вооружением (далее – СУАВ) в процессе наведения управляемого средства поражения с ТВГСН и проработка методической схемы решения задач, сопутствующих применению управляемой авиационной ракеты класса «воздух – поверхность» по данным целеуказания с беспилотного летательного аппарата при поражении обнаруженных и распознанных наземных объектов, являются в настоящее время актуальными.
Оперативная схема обнаружения и распознавания наземной цели
Идея заключается в том, что при использовании разработанного алгоритма со сверточной нейронной сетью (далее – СНС) в оптико-электронной системе (далее – ОЭС) беспилотного летательного аппарата и дальнейшей передачи изображения наземной цели в ТВГСН ракеты, где осуществляется функционирование разработанного алгоритма с искусственной нейронной сетью (далее – ИНС) происходит автоматическое распознавание требуемой наземной цели. Кроме того, имеется вариант загрузки изображения требуемой наземной цели в память ракеты оператором наземной станции управления в случае, когда самолет готовится к боевому вылету (Рисунки 1, 2) [1–3].
Рисунок 1. Оперативная схема взаимодействия
Выполнение анализа СУАВ в несколько этапов
На первом этапе для исследования СУАВ в процессе наведения управляемых авиационных средств поражения необходимо конкретизировать цели, по которым они будут применяться; информационные подсистемы, размещенные на самолете-носителе, типы УАСП оперативно-тактического назначения, а также рассмотреть воздействующие факторы и существующие ограничения, обусловленные особенностями применения и складывающегося фоноцелевого обеспечения (Рисунок 3).
Методика оценки системы управления авиационным вооружением в процессе ...
Система наведения ракеты
Ракета
Подготовка самолета-носителя к вылету
БпЛА
ОЭС БпЛА
Командный пункт управления
Спутниковая иавигацношыя система ГЛОНАСС
ПЗУ БЦВМ ракеты. Ракета под самолетом-носителем
Самолет-носитель
Изображение наземной пели
Разработанный алгоритм с ИНС
Распознавание наземной цели и выделение се на изображении
Распознавание и определение наземной цели
Разработанный алгоритм с СНС
Оператор
Рисунок 2. Взаимосвязанная совокупность разработанных алгоритмов моделей по распознаванию наземной цели
Рисунок 3. Структурно-блочный анализ СУАВ
Представленный анализ позволяет сделать вывод, что единственно возможным средством поражения в таких условиях является управляемая авиационная ракета (далее – УАР) Х-29ТЭ с телевизионной индикацией цели. При этом все интересующие объекты в видимом диапазоне обладают контрастностью и формой, что позволяет выделять их на фоне подстилающей поверхности в телевизионной системе наведения.
На втором этапе исследования производится анализ телевизионной системы наведения. Как видно из представленной на Рисунке 4 схемы, технические характеристики и особенности средств поражения обеспечивают достаточно существенное влияние на эффективность боевого применения рассматриваемой УАР [4].
Технические наряпсрманки (особенности)
Метлы 1ывс.1ения
УАСПсТВГСН
Телевизионная навсдсння
ЬЛСПсТШТН
KoMUHiMipueuuuiil
TTX ЯТПС
I Inexioi и luecjnuii l wvefNexwumKi
Ра ipaboiea хн орш иа ааюмл пели телсвимкмаиой головы»
Рисунок 4. Структурно-блочный анализ ТВГСН УАР Х-29ТЭ
Рассмотрение условий применения и методов наведения позволило прийти к выводу о повышении вероятности преодоления ПВО противника при использовании данной управляемой авиационной ракетой с ТВГСН.
Анализ способов наведения УАСП позволил выявить основной недостаток системы на-
Условие боевою применение (мрапнчеипм)
koopjiuuiw 1КЛИ
<1мрчи^*ииие liapjwrifire lUfUkKMUl » uwiJUWI IK Виоплиеянс и in имферимтианшп писи Внтупы1мП поиск и обнаружение цели
Саосврсмснность wnainoaiaa алпаршмя
paciKiiKaiuiKiui
с шэнным углом упреждения ЬичрчкТхиек HUM Применение УЛСП ведения – коррекцию траектории ракеты на конечном этапе наведения осуществляет человек. Влияние человеческого фактора на эффективность СУАВ характеризуется вероятностными характеристиками обнаружения, своевременного и безошибочного управления [4]. Своевременность решения задачи в человеко-машинной системе оценивается вероят- ностью того, что стоящая перед системой задача будет решена за время Ттр, не превышающее располагаемое Тр . Вероятность своевременного выполнения алгоритма распозна вания цели Рсв: Гт* — *т \ п _ р (-т < Т I - ф Р ^ fl) , (1)
где
T
mp
,
T
p
- соответственно, требуемое и располагаемое время для реализации алгоритма распознавания; Ф – функция Лапласа;
σt
– среднеквадратическое отклонение случайных величин
Tmp
,
Tp
. Величина времени
Tp
определяется условиями боевого применения скоростью полета самолета, дальностью до цели и минимальной дальностью пуска
Методика оценки системы управления авиационным вооружением в процессе ... рассматриваемых ракет. Требуемое время реализации алгоритма распознавания оценивается с помощью программно-математического обеспечения всех операций по наведению УАСП. В некоторых случаях становятся невозможным совмещать во времени мыслительные способности человека и двигательные процессы ввиду их разной индивидуальности.
Вероятность безошибочной реализации алгоритма управления во многом зависит от коэффициента загрузки оператора
K
3
, представляющего собой отношение времени, необходимое для выполнения данного действия с максимально возможной скоростью, ко времени, реально располагаемому человеком, может быть определена следующим образом:
T
K
з
=
.
(2)
Tp Вероятность безошибочной реализации всего многошагового процесса управления вычисляется как произведение вероятностей безошибочной реализации элементарных операций [7]:
P
.
=
П
П
-А
П
Г
-
.
P
y
,
(3)
где
P
g
Y
- вероятность безотказной работы технических средств СУО при выполнении
k
-го элемента алгоритма распознавания; µ – общее число работ, выполняемых аппаратной частью СУО;
P
6
j
- вероятность безотказной работы технических средств СУАВ при выполнении
j
-го элемента управляющего алгоритма;
n
– общее число работ, выполняемых аппаратной частью СУАВ.
Если считать поток успешных пусков простейшим, то вероятность непоражения самолета-носителя будет подчиняться показательному закону:
P
í
=
e
-
λτ
, (4)
где λ – средняя интенсивность потока поражающих выстрелов; τ – время нахождения самолета в зоне поражения противником. Таким образом, необходимость уменьшения времени τ с целью увеличения вероятности непоражения обуславливает дополнительные ограничения на располагаемое время. Следует учитывать, что пилот осуществляет поиск наземной цели на заданной местности, поэтому для оценки вероятностных характеристик процесса визуального поиска может быть выбран последовательный поиск с равномерным законом распределения координат точки обзора. Вероятность обнаружения цели в этом случае
-
Po^
s
D
Р
обн
(
t
)
=
1
-
e
SV-
, (5)
где
P
g
- условная вероятность обнаружения цели при условии, что она находится на осматриваемом участке местности;
US
– средняя скорость обзора;
S
– площадь района, в котором находится цель;
D
- дальность до цели;
V
e.H
- скорость самолета-носителя.
С учетом рассмотренных компонент обобщенный показатель эффективности СУАВ – вероятность поражения наземного объекта
W –
можно вычислить по формуле
W
=
Pg
P
H
P
g
P
ee
W
yACn
, (6)
где POgH - вероятность обнаружения цели; P^ - вероятность не поражения самолета; Pg - вероятность безотказной работы технических средств СУО, СУАВ; Рсв - вероятность своевременного выполнения алгоритма распознавания цели; WyAcn — условная вероятность поражения наземной цели, зависящая только от характеристик УАСП. Для оценки эффективности используемой в настоящее время СУАВ проведен расчет вероятностей по формулам (1)–(5) и обобщенного показателя эффективности СУАВ по формуле (6). В результате анализа приведенных на Рисунках 5–9 графиков, выявлены следующие особенности и недостатки существующей СУАВ:
– необходимость визуального обнаружения объекта штурманом (летчиком) приводит к значительному увеличению требуемого времени подготовки УАСП к применению (Рисунок 5), поэтому при использовании существующего научно-методического аппарата по распознаванию наземных целей, вероятность своевременного выполнения операции по распознаванию будет увеличиваться (
Р
св1);
– современное состояние средств ПВО позволяет уничтожить самолет-носитель за коротко возможное время, что не всегда позволяет штурману (летчику) распознать требуемую цель;
– применение УАСП со второго и более заходов значительно повышает вероятность поражения самолета-носителя наземными средствами ПВО противника, а увеличение времени поиска, обнаружения и распознавания наземной цели ведет к значительному снижению показателя эффективности, особенно на малых начальных дальностях поиска цели, обусловленных большими величинами ошибок наведения (Рисунок 5), а значит, раннее обнаружение и распознавание наземной цели снизит вероятность (
Р
н), вследствие чегоуменьшается время (τ) нахождения самолета в зоне поражения огневыми средствами ПВО противника (Рисунок 6);
– проведено исследование по сравнению вероятности поражения наземной цели
Р
ПОР2 (Рисунок 6, Таблица 1) при использовании разработанного алгоритма, с
Р
ПОР1 при использовании оптического обнаружения и распознавания наземной цели штурманом (летчиком) при наличии средней интенсивности
λ
потока выпущенных по самолету-носителю зенитных ракет (
λ
≥
0,0167).
Рисунок 5.
Зависимость обобщенного показателя эффективности СУАВ и его составляющих от дальности пуска при использовании визуального (оптического) обнаружения и распознавания наземной цели летчиком (штурманом)
Методика оценки системы управления авиационным вооружением в процессе ...
Рисунок 6.
Зависимость обобщенного показателя эффективности СУАВ и его составляющих от дальности пуска до цели при разработанном алгоритме автоматического распознавания
В Таблице 1 значения вероятности поражения показывают
Р
ПОР2 >
Р
ПОР1 из-за времени распознавания разработанного алгоритма, которое будет меньше (
t
расп
≤
0,03 с), чем у существующих (
t
расп
≥
8 с). Далее время, необходимое для процесса обнаружения наземной цели, уменьшится до (
t
об
≤
0,02 с), а при вероятности обнаружения (
Р
обн ≈ 0,77 и
S
= 0,5 × 0,5 км
2
) –вероятность безошибочной реализации всего многошагового процесса управления составит (
Р
б ≈ 0,99).Вероятность непоражения самолета-носителя(
Р
н ≈ 0,98) и своевременного выполнения алгоритма распознавания(
Р
св2
≤
0,99), а также вероятность поражения цели одной ракетой составит 0,72[6].
Таблица 1
Сравнение вероятности поражения наземной цели
Р
ПОР2
с
Р
ПОР1
Дальность до цели, км
5
10
15
20
25
28
30
ПОР1
0,1
0,3
0,45
0,54
0,47
0,35
0,3
ПОР2
0,39
0,6
0,72
0,68
0,52
0,4
0,33
Кроме того, вероятность поражения наземной цели (
Р
ПОР2) пропорциональна средней интенсивности λ потока пущенных по самолету-носителю зенитных ракет, как показано на Рисунке 7, где максимальная вероятность
Р
ПОР2уменьшается при увлечении
λ
.
Вероятность распознавания (
Р
расп1) требуемой цели штурманом без автоматического распознавания средства поражения представлена на Рисунке 8. Значение показателя эффективности увеличивается на 15…20 % при дальностях менее половины максимальной дальности применения УАСП.
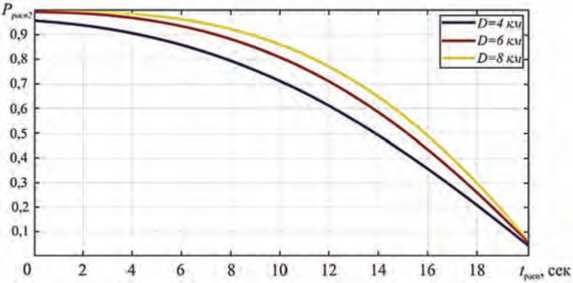
Разработанный алгоритм автоматического распознавания требуемой цели на Рисунке 9 показывает (
Р
расп2
≥
0,9), когда время для реализации алгоритма распознавания (
t
р
асп
(
T
g
)
<
4
с.), при значении дальности до цели (
D
= 4 км).
Рисунок 7.
Зависимость вероятности поражения цели (
Р
ПОР2
) от дальности до цели при различных значениях λ
Рисунок 8.
Зависимости вероятности распознавания требуемой цели штурманом от времени распознавания
Рисунок 9.
Зависимости вероятности распознавания цели от времени распознавания с разработанным алгоритмом при различных значениях дальности обнаружения цели
Результат сравнения между зависимостями (8) и (9) показан в Таблице 2. Методика оценки системы управления авиационным вооружением в процессе ... Таблица 2
Сравнение вероятности распознавания наземной цели
Р
расп1
с
Р
расп2
Дальность до цели
(
D
= 4 км)
t
расп1
, с
2
4
8
12
16
18
Р
расп1
0,44
0,35
0,13
0,05
0,01
0
Р
расп2
0,94
0,91
0,80
0,63
0,38
0,24
Дальность до цели
(
D
= 6 км)
Р
расп1
0,65
0,61
0,52
0,35
0,15
0,1
Р
расп2
0,98
0,96
0,89
0,74
0,47
0,29
Дальность до цели
(
D
= 8 км)
Р
расп1
0,68
0,67
0,65
0,6
0,5
0,3
Р
расп2
0,99
0,98
0,93
0,8
0,52
0,33
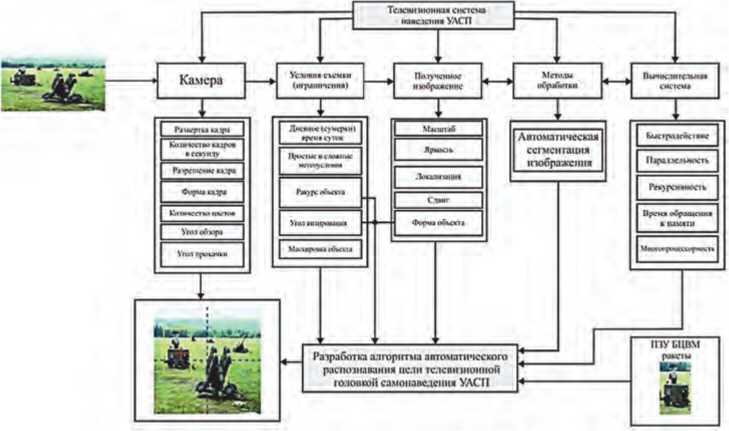
На третьем этапе оценки рассматривается телевизионная система, расположенная непосредственно на УАСП (Рисунок 10).
Рисунок 10.
Структурно-блочный анализ ТВГСН УАР с разработанным алгоритмом автоматического распознавания наземной цели
Анализ характеристик используемых телевизионных камер выявил существенный их недостаток – низкое качество изображения, определяемое соответствующими параметрами [5; 6]. Результаты исследования условий съемки с телевизионных изображений показывают, что объекты на них могут иметь: различный масштаб, яркость и контраст, находиться в произвольном месте кадра или отсутствовать вовсе. Изображение может быть подвержено искажениям и помехам. Кроме того, изображение является лишь двумерной проекцией трехмерного объекта, поэтому для одной и той же наземной цели используются разные изображения с точки зрения размеров, ракурса, яркости и контрастов; в до- полнение к вышеперечисленному – время, затрачиваемое на подготовку эталонного изображения путем предварительной обработки при сегментации и распознавании. Выводы Результаты анализа существующих методов обработки и анализа изображений позволили разработать ряд алгоритмов сегментации на основе сверточных нейронных сетей и извлечения особых точек, инвариантных к условиям наблюдения. При этом существующие многопроцессорные вычислительные системы позволяют обрабатывать видеопотоки в реальном масштабе времени. Таким образом, системный подход к исследованию СУАВ позволил обосновать необходимость функционального синтеза модели, включающей в себя новый способ наведения УАСП по ТВ-изображению с борта БпЛА, минимизирующий влияние человеческого фактора на процесс наведения и исключающий вероятность подавления каналов связи и управления УАСП.
Список литературы Методика оценки системы управления авиационным вооружением в процессе наведения управляемых авиационных средств поражения, оснащенных оптико-электронными головками самонаведения
- Аль Сафтли Ф.Х., Баланян С.Т., Белоножкин В.В., Егоров П.С. Разработка методики определения параметров процесса сегментации и распознавания образов наземных целей в телевизионных головках самонаведения // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2021. Вып. 4-1. С. 39-48.
- Аль Сафтли Ф.Х. Сегментация изображений и распознавание объектов на основе технологии сверточных нейронных сетей // Сборник научных статей ВА ВКО. 2021. С. 234-247.
- Аль Сафтли Ф.Х., Баланян С.Т. Исследование алгоритма по обнаружению особых точек на изображении и использование его в системах наведения ракет // Воздушно-космические силы. Теория и практика. 2020. № 15. С.193-208.
- EDN: DAZPNW
- Дьяконов О.Ф. Бортовые комплексы управления беспилотных летательных аппаратов / под ред. Г.П. Чигина. М.: ВВИА имени проф. Н.Е. Жуковского, 1996. 201 с.
- Иванов С.И. Энциклопедия. XXI век. Оружие и технологии России. Авиационное вооружение и авионика. Т. 10. М.: Оружие и технологии, 2005. 784 с.
- Канащенков А.И. Авиационные системы радиоуправления. Т. 3. Системы командного радиоуправления. Автономные и комбинированные системы наведения / под общ. ред. А.И. Канащенкова. М.: Радиотехника, 2004. 320 с.
- Оптико-электронные системы авиационного вооружения: учебник для слушателей и курсантов вузов ВВС / А.М. Краснов, Г.А. Донгаев, И.И. Маслов, Е.М. Пермяков, В.Г. Рычков, В.А. Конуркин. М.: ВВИА имени проф. Н.Е. Жуковского, 2007. 1272 с.
