Методика оценки вероятности добывания данных об объекте с использованием оптико-электронных систем беспилотных летательных аппаратов

Автор: Свищо В.С., Уваров А.И., Фалилеев В.Ю., Громов Ю.Ю.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 7 т.14, 2021 года.
Бесплатный доступ
Представлена методика оценки вероятности добывания данных об объекте с использованием оптико-электронных средств беспилотных летательных аппаратов. Рассмотрены оптимальные высоты применения беспилотных летательных аппаратов в зависимости от погодных условий. Получены численные оценки зависимости характеристик оптико-электронных средств от факторов, влияющих на их использование. Определен актуальный период использования беспилотных летательных аппаратов для повышения вероятности добывания данных об объекте. Построены графики использования оптико-электронных средств разного диапазона длин волн с учетом интервала времени.
Летательный аппарат, беспилотный летательный аппарат, вероятность, оптико-электронная система, фокусное расстояние
Короткий адрес: https://sciup.org/146282323
IDR: 146282323 | УДК: 519.213 | DOI: 10.17516/1999-494X-0357
Methodology for estimating the probability of obtaining data about an object using optoelectronic systems of unmanned aerial vehicles
The article presents a method for estimating the probability of obtaining data about an object using optoelectronic means of unmanned aerial vehicles. The optimal heights of the use of unmanned aerial vehicles depending on weather conditions are considered. Numerical estimates of the dependence of the characteristics of optoelectronic devices on the factors affecting their use are obtained. The actual period of the use of unmanned aerial vehicles to increase the probability of obtaining data about the object is determined. Graphs of the use of optoelectronic devices of different wavelength ranges, taking into account the time interval, are constructed.
Текст научной статьи Методика оценки вероятности добывания данных об объекте с использованием оптико-электронных систем беспилотных летательных аппаратов
Цитирование: Свищо, В. С. Методика оценки вероятности добывания данных об объекте с использованием оптикоэлектронных систем беспилотных летательных аппаратов / В. С. Свищо, А. И. Уваров, В. Ю. Фалилеев, Ю. Ю. Громов // Журн. Сиб. федер. ун-та. Техника и технологии, 2021, 14(7). С. 803–811. DOI: 10.17516/1999-494X-0357
Наличие широкого диапазона применения беспилотных летательных аппаратов (БпЛА), способных выполнять сверхдальние и сверхвысотные полеты, обеспечивает большое разнообразие в выборе оптико-электронных систем (ОЭС), играющих одну из главных ролей в получении информации об объектах интереса [1].
В основном на современных БпЛА устанавливаются гиростабилизированные оптикоэлектронные системы, которые могут включать в себя телевизионные и инфракрасные камеры. Использование данных камер способствует повышению информативности получаемого изображения и дает возможность более точного определения координат объекта интереса [2].
На изображениях, полученных в видимом диапазоне, объекты интереса опознаются по совокупности опознавательных признаков, которые формируются в зависимости от интенсивности излучения солнечного света, времени суток, освещенности, атмосферных условий, степени маскировки и характера местности.
Особенностью изображений, полученных в тепловом инфракрасном диапазоне, считается интенсивность теплового излучения объекта. Также преимуществом съемки в инфракрасном диапазоне является возможность обнаружения объектов за счет различий в их излучательной способности в отсутствие естественного освещения. Однако следует отметить, что в ночное – 804 – время природные и антропогенные объекты имеют иные соотношения интенсивности теплового излучения, нежели в дневное [3].
Целью данной статьи служит рассмотрение и анализ погодных условий и факторов, оказывающих существенное влияние на работу бортовых оптико-электронных систем, осуществляющих мониторинг местности с оценкой вероятности добывания информации об объектах интереса.
Повышение вероятности обнаружения малозаметных техногенных объектов достигается использованием на БпЛА многоспектральных оптико-электронных систем (МОЭС), обеспечивающих совместную обработку полей яркостей в различных диапазонах длин волн [4].
Определение метеорологических условий и факторов, влияющих на работу ОЭС, будем анализировать на основе вероятности добывания данных об объекте.
В зависимости от применяемых ОЭС, степени применения маскировочных средств, учета ложных объектов, атмосферных условий, времени суток можно определить вероятность добывания данных об объекте для различных типов датчиков ( ) и произвести расчет данных на основании выражения
Рд1 ^Bi " Робн1 * ^paci " (1 Qnaci), где Рд; - вероятность добывания данных об объекте при использовании ОЭС i-го спектрального диапазона; – вероятность выхода на объект (район); – вероятность обнаружения объекта; Ppaci - вероятность получения требуемых разведывательных данных с заданной точностью; – вероятность пассивного противодействия противника.
Под индексом i будем рассматривать ОЭС разного диапазона, при i =1 понимаем фотоприемник видимого диапазона, под i =2 - фотоприемник инфракрасного диапазона, под i =3 - фотоприемник совместной обработки изображений видимого и инфракрасного спектров.
– вероятность выхода на объект при использовании i -го датчика оценим как произведение вероятностей:
Р = Р ■ Р •
1 Ш 1 U3JU 1 МрШ1, где – вероятность взлета летательного аппарата; – вероятность полета летательного аппарата по заданному маршруту до момента выхода на объект. Использование ОЭС i-го спектрального диапазона не оказывает влияния на вероятность . Обобщенное выражение для оценки вероятности выхода на объект имеет следующий вид:
Р - Р ■ Р 2 В 2 ВЗЛ 2 МрШ, где Ризл зависит от метеорологических условий, к которым относится фактический ветер у земли. В качестве показателя эффективности скрытного полета летательного аппарата (ЛА) целесообразно выбрать интервал времени от момента входа ЛА в зону обнаружения обзорного радиолокатора до момента первого обнаружения ЛА [5], где Рмрш примем равной 0,99.
Для анализа интересующих нас условий использованы данные ежечасных наблюдений на аэропорту «Астрахань» г. Астрахани за период с 2015 по 2019 год. Наблюдения производились инструментально (с использованием аппаратуры «ДBO-2», «ЛИНГО-1М», «ЛИНГОМ-2») и по данным, полученным с борта самолетов [6].
Для аэропорта «Астрахань» ветры западного и восточного направлений практически совпадают с направлением ВПП, с курсом 81̊ и 261̊. Северные и южные ветры перпендикулярны ВПП. Преобладающим направлением ветра является восточное, составляющее 29 % от общего числа случаев. Реже всего наблюдаются ветры южного и юго-западного направлений (5–6 %).
Среднегодовая скорость ветра 5,7 м/с, среднемесячная наименьшая скорость ветра 4,2 м/с, среднемесячная наибольшая скорость ветра 8,4 м/с.
Для расчета вероятности взлета ЛА обратимся к количеству дней с ветром более 15 м/с. Оценку вероятности взлета произведем через количественное соотношение событий:
р = 1 — ^2 (4)
, ()
где /Vcp – среднее число дней с ветром более 15 м/с; n – количество дней в данном месяце. Вероятности взлета ЛА по месяцам в зависимости от скорости ветра приведены в табл. 1.
Рассмотрев значения вероятности взлета ЛА, зависящего от скорости ветра, можно сделать вывод о том, что благоприятным периодом года являются месяцы январь и июнь, а с меньшей необходимостью нужно использовать летательные аппараты в марте и апреле.
Вероятность обнаружения объекта ( ) зависит от высоты применения и типа ОЭС, про ницаемости атмосферы и освещенности. На основе данных параметров получим следующее выражение для расчета вероятности обнаружения объекта, которое имеет вид
^обш ^Ш ^Ег , (5)
где PHi – вероятность обнаружения объекта ОЭС в зависимости от высот использования БпЛА; рEi – вероятность использования ОЭС в зависимости от времени суток.
Качество ведения воздушной разведки ОЭС зависит от многих характеристик, в том числе и разрешения датчика на местности. Проведем расчет фокусного расстояния (угла зрения камер) для обеспечения одинакового разрешения на местности применяемых ОЭС БпЛА.
Эффективное обнаружение объекта при помощи ОЭС, установленных на БпЛА «Элерон», возможно вести на высоте 300 м; на БпЛА «Орлан» – 900 м; на БпЛА «Форпост» – 2000 м. На возможность получения достоверных данных при использовании ОЭС оказывает влия-
Таблица 1. Вероятности взлета ЛА в зависимости от скорости ветра
Table 1. The probability of an aircraft taking off depending on the wind speed
Phi = 1 ~ Рабл , (6)
где – вероятность повторяемости высоты нижней границы облаков ниже указанных пределов. Значения вероятностей Phi приведены в табл. 2.
Из анализа данных табл. 2 следует, что на высоте не более 300 м РН 1 = 100 % в июле и августе, а в декабре РН 1 = 28 %. На высоте не более 900 м РН 2 составляет от 98 до 99 % в августе и сентябре, а наименьшая РН 2 = 16 % соответствует декабрю. На высотах не более 2000 м РН 3 = 90 % в августе и сентябре, а наименьшая РН 3 = 26 % приходится на декабрь. Значения ^Hi зависят от использования БпЛА на разных высотах, но не зависят от используемых типов ОЭС.
Большое число спектральных каналов и высокое спектральное разрешение приводят к значительной информационной избыточности, поэтому на одном из этапов производится выделение информативного набора спектральных признаков. Для этих целей используется метод главных компонент (PCA) или его модификации (блочный PCA и метод минимизации шумовых помех), позволяющий на порядок сократить число спектральных признаков без существенного снижения качества классификации [7].
На вероятность обнаружения объекта значительное влияние оказывает освещенность местности. На основе данных по продолжительности светового дня и ночи [6] значения вероятностей использования БпЛА в зависимости от времени суток представлены в табл. 3.
Вероятность эффективного использования ОЭС в светлое время суток
Таблица 2. Вероятность обнаружения объекта в зависимости от высот использования беспилотного летательного аппарата
Table 2. The probability of detecting an object depending on the height of the use of an unmanned aerial vehicle
|
Вероятность (%) |
Месяц |
|||||||||||
|
Pt m И w |
л ч cd Pt m о •e |
§ |
5 |
>s 2 |
S s |
4 s |
cj |
8 |
to W О |
to w |
Ph to M 4 |
|
|
Вероятность появления высоты облаков менее 300 м ( Р обл ) |
24,2 |
11,6 |
11,7 |
6,2 |
1,2 |
0,4 |
0,0 |
0,0 |
0,4 |
8,1 |
24,2 |
61,4 |
|
Вероятность обнаружения объекта при высоте 300 м ( Р Н 1 ) |
75,8 |
88,4 |
88,3 |
93,7 |
98,8 |
99,6 |
100 |
100 |
99,6 |
91,9 |
75,8 |
28,6 |
|
Вероятность появления высоты облаков менее 900 м ( Р обл ) |
69,4 |
44,9 |
51,7 |
15,7 |
14,5 |
10,8 |
3,6 |
1,2 |
0,8 |
29,1 |
62,1 |
83,1 |
|
Вероятность обнаружения объекта при высоте 900 м ( Р Н 2 ) |
30,6 |
54,1 |
48,3 |
84,3 |
85,5 |
89,2 |
96,4 |
98,8 |
99,2 |
70,9 |
37,9 |
16,9 |
|
Вероятность появления высоты облаков менее 2000 м ( Р обл ) |
70,7 |
44,9 |
54,7 |
19,1 |
23,0 |
24,1 |
19,3 |
9,7 |
8,4 |
29,5 |
64,1 |
83,1 |
|
Вероятность обнаружения объекта при высоте 2000 м ( РН 3 ) |
29,3 |
55,1 |
45,3 |
80,9 |
77 |
75,9 |
80,7 |
90,3 |
91,6 |
70,5 |
35,9 |
16,9 |

,
где Qc – время полных суток; Уд – средняя продолжительность светового дня. Вероятность эффективного использования ОЭС в темное время суток
PEHl - , (8)
где Qc – время полных суток; Qh – средняя продолжительность темного времени суток.
Из анализа данных табл. 3 следует, что эффективное использование ОЭС в светлое время суток максимально возможно с мая по июль, а минимально – в декабре и январе. Ведению ночной съемки большей продолжительности будут способствовать месяцы декабрь, январь.
Использование ОЭС видимого диапазона применяется только в светлое время суток, а применение ОЭС инфракрасного диапазона возможно как в светлое, так и в темное время суток. Исходя из этого следует, что обеспечить всесуточность ведения съемки возможно при использовании ОЭС, в состав которых входит приемник как видимого диапазона, так и инфракрасного [8].
Вероятность распознавания зависит от технических характеристик применяемых камер, а также формы и контраста объекта. Оценить вероятность обнаружения и распознавания оператором объектов возможно с помощью следующего выражения [9]:
Ppac eXP i 1, (9)
L lmiKC W )
где{-(d^)j– показатель ослабления разрешения объекта на полученном от фотоприемника изображении, представленный следующими составляющими: B – коэффициент распознавания формы объекта; L – ЛРМ (линейное разрешение на местности) ОЭС; Iпикс – максималь-
Таблица 3. Вероятность использования ОЭС в зависимости от времени суток
Table 3. The probability of using optoelectronic devices depending on the time of day
получим выражение следующего вида:
Подставив в показатель ослабления L , ^■Rcfj

где R – расстояние до объекта; B – коэффициент распознавания формы объекта; Rc – разрешающая способность ОЭС; Тэ – фокусное расстояние объектива. Значения переменных В , Iпикс , К для всех рассматриваемых ОЭС будем считать равным и представим как
тогда выражение (10) будет иметь вид

Вероятность обнаружения и распознавания объектов поиска в заданном районе и время, необходимое для выполнения этого поиска, можно рассчитать по известным характеристикам ОЭС, полета БпЛА, размерам района поиска и объекта поиска. Эти зависимости позволяют решить задачу, когда по заданному значению вероятности обнаружения и распознавания объекта поиска, известным характеристикам ОЭС, размерам района поиска и объекта поиска можно рассчитать параметры полета БпЛА и количество вылетов в район поиска, обеспечивающих минимальное время поиска [10].
На основе данных табл. 1–3 и с учетом выражений (1–12) зависимости добывания данных об объекте, с учетом условий и факторов, представлены на рис. 1.
Проведенный анализ факторов, влияющих на вероятность добывания данных, подтверждает необходимость комплексного подхода к сбору и обработке данных от фотоприемников разного спектрального диапазона длин волн. Повысить вероятность распознавания объектов можно путем суммирования информационных параметров, определяющих их признаки и отличительные характеристики в каждом из примененных ОЭС беспилотных летательных аппаратов.
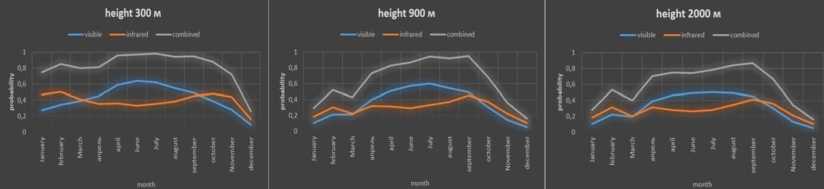
Рис. 1. Вероятность использования ОЭС БпЛА различного диапазона длин волн с учетом интервала времени
Fig. 1. The probability of using optoelectronic means of unmanned aerial vehicles of various wavelength ranges, taking into account the time interval
Список литературы Методика оценки вероятности добывания данных об объекте с использованием оптико-электронных систем беспилотных летательных аппаратов
- Фетисов В. С., Неугодникова Л. М., Адамовский В. В., Красноперов Р. А. Беспилотная авиация: терминология, классификация, современное состояние. Под ред. В. С. Фетисова. Уфа: ФОТОН, 2014. 217 с.
- Кожанов Н. Ю., Танченко А. П., Москаленко Ю. В., Мартимов Р. Ю., Петроченко А. В. Перспективные методы обработки потоков видовых данных для повышения результативности применения БЛА. Доклады и статьи ежегодной научно-практической конференции "Перспективы развития и применения комплексов с беспилотными летательными аппаратами". Коломна, 2016. С. 175-180.
- Безуглый Н. Н., Чупаков М. В., Симак В. Н. Справочник по беспилотным летательным аппаратам стран НАТО и Израиля. Кн. 2 (Полезная нагрузка, системы обеспечения и связи). Под ред. Н. Н. Безуглого. Севастополь, 2014
- Ищук И.Н., Степанов Е. А., Бeбенин А. А., Дмитриев Д. Д., Филимонов А. М. Способ классификации объектов оптико-электронными системами разведки на основе обработки многоспектрального кубоида изображений. Журн. Сиб. федер. ун-та. Техника и технологии, 2017, 10(2), 183-190
- Замараев В.В., Кутузов А. С., Лютиков И. В., Мальцев Д. В. Метод построения траектории скрытного выхода летательного аппарата в заданную точку зоны обнаружения обзорного радиолокатора, основанный на анализе спектра доплеровских частот принимаемого сигнала. Журн. Сиб. федер. ун-та. Техника и технологии, 2021, 14(3), 281-291
- РосГидромет. Астраханский центр по гидрометеорологии и мониторингу окружающей среды. - Режим доступа: https://www.meteorf.ru/about/structure/cgms/3130/ - Заглавие с экрана.
- Пестунов И.А., Рылов С. А., Мельников П. В. Классификация гиперспектральных изображений высокого пространственного разрешения. Журн. Сиб. федер. ун-та. Техника и технологии, 2018, 11(1), 69-76
- Ищук И.Н., Долгов А. А., Лихачев М. А., Тельных Б. К. Модель расчета теплофизических параметров материалов по данным многоспектральной разновременной фотографической съемки земной поверхности. Журн. Сиб. федер. ун-та. Техника и технологии, 2020, 13(7), 894-906
- Веселов Ю. Г., Данилин А. А., Тихонычев В. В. Выбор текст-объекта для оценки разрешающей способности цифровых оптико-электронных средств мониторинга земной поверхности. Наука и образование, МГТУ им. Н. Э. Баумана, 2012, 4, 1-24.
- Тищенко А.И., Артыщенко С. В. Математическая модель вероятности обнаружения точечной цели оператором полезной нагрузки оптико-электронной системы беспилотного летательного аппарата. Журн. Сиб. федер. ун-та. Техника и технологии, 2020, 13(3), 328-337
