Методика определения положения метеорологической ракеты в пространстве

Автор: Безукладников Евгений Владимирович, Разумов Артем Николаевич
Статья в выпуске: 23 (240), 2011 года.
Бесплатный доступ
Приведено описание методики определения положения метеорологической ракеты в пространстве. Информация о положении осей ракеты в полёте получается в результате анализа показаний датчика линейных ускорений. Предлагаемая методика позволяет снизить стоимость используемых бортовых измерительных систем.
Метеорологическая ракета, определение положения, определение ориентации
Короткий адрес: https://sciup.org/147155283
IDR: 147155283 | УДК: 629.05
Method of attitude determination of meteorological rocket in space
The paper describes the methodology for attitude determination of meteorological rockets in space. Information on the rocket axes attitude in flight is the result of the analysis of the sensor linear accelerations. The proposed method can reduce the cost of onboard measuring systems used.
Текст научной статьи Методика определения положения метеорологической ракеты в пространстве
В процессе полёта метеорологической ракеты происходит её вращение вокруг продольной оси. Скорость данного вращения может достигать 300‒ 600 об/мин и сопровождаться прецессией оси. Для расшифровки результатов измерений научной ап-паратуры необходима информация о положении ракеты в каждый момент времени. Для этого могут использоваться следующие методы: - нове гироскопической системы либо методы с ис-1 пользованием привязки к внешней среде.
Цена гироскопической системы, сохраняю-щей стабилизацию при такой скорости вращения объекта (ракеты), крайне высока. Кроме того, со -временные гироскопы не обеспечивают высокую точность, необходимую при проведении испытаний с использованием научной аппаратуры, из-за нака-пливания ошибки в их показаниях (дрейфа оси).
Рассмотрим методы привязки к внешней сре-де . Одним из возможных вариантов решения про-блемы может являться оптическая привязка к внешней среде. Данный вариант является трудным в реализации, поскольку зависит от множества внешних дестабилизирующих факторов : - димо обеспечить работу системы в любых метео-рологических условиях, при любой облачности,в любое время суток. Также принципиальной про- блемой является отсутствие постоянного объекта привязки, поскольку ни одно из небесных тел не может обеспечить выполнение всех приведённых 2
выше условии.
Другим вариантом определения положения ракеты в пространстве может служить измерение вектора магнитного поля. Но такая методика также не является оптимальной, поскольку величина вектора напрямую зависит от магнитного поля земли в точке старта (её географического положе-НИЯ)и, следовательно, не может обеспечить уни-версальность методики. Кроме того, существует ряд факторов, влияющих на измеряемый вектор магнитного поля : ; магнит- ные аномалии, вызываемые залежами ископаемых РУД ; искусственно создаваемые магнитные поля (в случае наличия рядом, например , ускорительной техники), собственные магнитные моменты, соз-даваемые ракетой. Направление вектора магнитно-го поля меняется с высотой.
Исходя из приведённого выше анализа, был применён наиболее простой и эффективный метод решения данной задачи. Используемый метод ос-новывается на применении датчика линейных ус-корений. В данном случае удобно ввести цилинд-рическую систему координат (рис. 1).
Методика определения положения метеорологической ракеты в пространстве
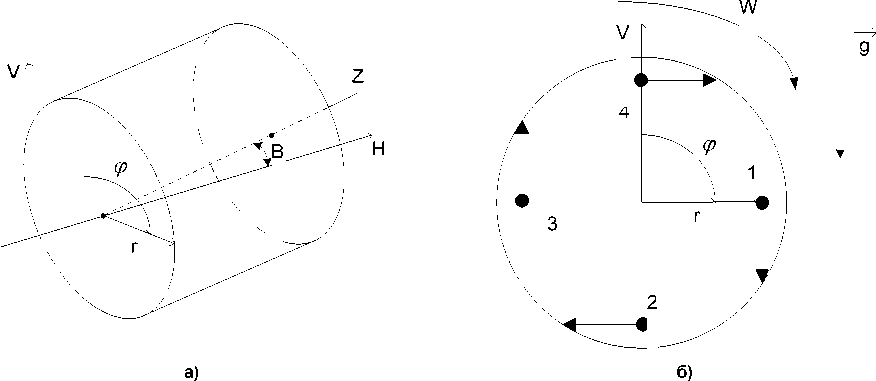
Рис. 1. Введённая цилиндрическая система координат
Ось Z системы координат сонаправлена с продольной осью ракеты; ось H ‒ ось, являющаяся проекцией оси Z на горизонтальную плоскость; Ф‒ угол отклонения от вертикальной оси в плос-КОСТИ, представленной на рис. 1, б; r ‒ расстояние до точки в плоскости перпендикулярной Z (см. рис. 1, а); V ‒ вертикальная ось ракеты.
Для привязки положения датчика (положения его оси) к системе координат связанной с ракетой рассмотрим сначала, плоскость, представленную на рис. 1, б(при горизонтальном положении раке-ты). Ось измерения датчиком показана вектором для разных положений ракеты.
Из рисунка видно, что датчик будет показы-вать значения, соответствующие ускорению 9,8 м/с2 (далее 1 g ) в положении 1, ускорение, соответст-вующее ‒1 g в положении 3, и значения, соответст-вующие 0 g в положениях 2и 4. Поскольку ракета будет вращаться в плоскости, представленной на рис. 1, б, то линейное ускорение будет выражаться
:
a g sin(W t) , где W ‒ частота вращения ракеты вокруг оси Z; a ‒ линейное ускорение, измеряемое датчиком (понятно, что данная формула справедлива лишь для равномерно вращающейся ракеты вокруг сво-ей оси).
Разумеется, при движении ракеты в простран-стве угол отклонения её оси Z от горизонтального положения будет отличным от нуля. Для учёта данного отклонения используется следующая за-:
a g sin(W t) cos B , где W ‒ частота вращения ракеты вокруг оси Z; B ‒ угол отклонения оси Z от горизонтального положения (оси H) (см. рис. 1, а).
Рассмотрим вид сигнала, выдаваемый датчи-ком при движении ракеты в пространстве. Схема-тическое изображение данного сигнала представ-ле но на рис. 2.
Фаза несущей сигнала будет соответствовать углу поворота ракеты вокруг своей оси, амплитуда несущей даст информацию об угле наклона оси Z ракеты относительно горизонтального направления.
Явление прецессии при полёте ракеты приве-дёт к амплитудно -модулированному сигналу на выходе датчика (см. рис. 2). Информация о вели-чине и частоте прецессии оси отражена в глубине
L-K модуляции ---- и частоте модулирующего сиг-
L+K
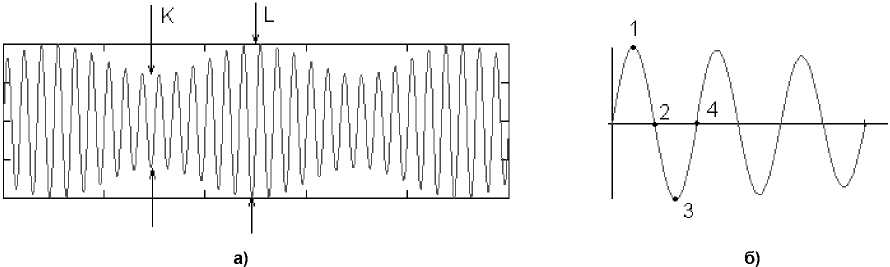
Рис. 2. Схематическое изображение сигнала: ‒ на длительном временном интервале; б‒ на коротком временном интервале
Серия «Компьютерные технологии, управление, радиоэлектроника», выпуск 14
Е. . Безукладников,А.Н.
нала. Угол прецессии продольной оси ракеты мо-
:
-
L - K
Т I V tg B tg a ,
LK где а ‒ угол прецессии продольной оси ракеты (оси Z).
Для выполнения применимости выбранной нами методики определения положения ракеты в пространстве необходимо соблюдение следующих :
-
1) частота прецессии продольной оси ракеты должна быть в несколько раз меньше частоты вращения ракеты вокруг продольной оси, в про-тивном случае будет довольно сложно выделить модулирующее колебание и несущую из получен-ного сигнала;
-
2) положение ракеты должно быть отличным от вертикального, иначе в отсутствие прецессии оси значения проекций ускорения на ось измере-ния датчика будут равны нулю ;
-
3) ракета не должна двигаться только за счёт сил инерции (например, быть в свободном падении), или же датчик будет в состоянии невесомости;
-
4) следует учитывать уменьшение ускорения свободного падения с увеличением высоты полёта ракеты .
Заключение
Выбранная нами методика измерений позво-лит передавать всего по одному телеметрическому каналу данные об угле поворота ракеты вокруг собственной оси в любой момент времени, угле наклона оси ракеты относительно горизонтальной плоскости, угловой скорости вращения вокруг продольной оси, величине и угловой скорости прецессии оси Z ракеты вокруг продольной оси.
Список литературы Методика определения положения метеорологической ракеты в пространстве
- Современная телеметрия в теории и на практике: учеб. курс/А.В. Назаров, Г.И. Козырев, И.В. Шитов и др. -СПб.: Наука и техника, 2003. -672 с
