Методика проведения и моделирование режимов копровых испытаний возвращаемого аппарата пилотируемого транспортного корабля

Автор: Воронин Виталий Викторович, Крутов Сергей Александрович, Решетников Михаил Николаевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Контроль и испытание летательных аппаратов и их систем
Статья в выпуске: 2 (21), 2018 года.
Бесплатный доступ
Рассмотрены вопросы проведения копровых испытаний и разработки математической модели посадки возвращаемого аппарата пилотируемого транспортного корабля, обобщенные сведения о концепции построения средств приземления корабля, назначение и роль копровых испытаний в общей программе экспериментальной отработки корабля, представлена методика проведения копровых испытаний макета возвращаемого аппарата, определены предварительные режимы проведения испытаний при штатных и расчетных нештатных условиях, приводится описание, структура и модель расчета динамики посадки возвращаемого аппарата на посадочные опоры, описаны силовые факторы, действующие в посадочной опоре, приведены характеристики посадочных грунтов и силовая характеристика раздвижного упора. Модель динамики процесса посадки разработана в специализированной системе виртуального моделирования механических процессов MSC Adams. Определены вертикальное и горизонтальное линейные ускорения в центре масс возвращаемого аппарата при посадке на прочный грунт для различных случаев штатной и расчетной нештатной посадок.
Копровые испытания макета возвращаемого аппарата, математическая модель посадки возвращаемого аппарата
Короткий адрес: https://sciup.org/143166671
IDR: 143166671 | УДК: 629.788.018.4:620.178
Procedure for conducting and simulating drop test modes for reentry vehicle of crew transportation spacecraft
The paper discusses issues involved in conducting drop tests and developing a math model of landing the reentry vehicle of the crew transportation spacecraft, general information about the concept of constructing the spacecraft landing equipment, the purpose and role of drop tests within the overall program of developmental testing of the spacecraft, it presents a procedure for conducting drop tests on the mockup of the reentry vehicle, defines preliminary modes for conducting tests under nominal conditions and design off-nominal conditions, provides a description, structure and a model for analyzing the dynamics of landing of the reentry vehicle on the landing pads, describes force factors acting in a landing pad, provides characteristics of landing soils and force characteristic of the extendable support. The dynamics model of the landing process was developed in a specialized system for virtual simulation of mechanical processes MSC Adams. Vertical and horizontal linear accelerations at the center of mass of the return vehicle during landing on firm soil were determined for various cases of nominal and contingency landings.
Текст научной статьи Методика проведения и моделирование режимов копровых испытаний возвращаемого аппарата пилотируемого транспортного корабля
Экспериментальная отработка является важнейшим этапом разработки и создания изделий ракетно-космической техники. Она приобретает особую роль, когда речь идет о разработке пилотируемых транспортных кораблей (ПТК) и их систем приземления как средств, от надежной работы которых непосредственно зависят здоровье и безопасность экипажа. РКК «Энергия» в настоящее время ведет разработку перспективного ПТК «Федерация» [1, 2], предназначенного для полетов как на околоземные орбиты, так и для полетов к Луне.
В данной статье рассматриваются вопросы моделирования процесса посадки возвращаемого аппарата (ВА) ПТК при проведении копровых испытаний макета ВА, освещаются основные направления работ при организации проведения копровых испытаний.
Назначение и состав средств приземления ПТК
Средства приземления ПТК предназначены для последовательного уменьшения скорости ВА перед приземлением для обеспечения допустимых нагрузок на экипаж и конструкцию, а также для обеспечения в случае штатной посадки на благоприятные сухопутные районы умеренных значений ударного нагружения и возможности дальнейшего использования конструкции ВА, а в случае посадки на малопригодные сухопутные районы и акватории — сохранности здоровья экипажа [3, 4]. Также должны обеспечиваться размещение и фиксация космонавтов в скафандрах при предстартовом ожидании и на всех участках полета.
Для выполнения этих требований в состав средств приземления входят следующие составные части:
-
• парашютная система;
-
• узлы отстрела крышки парашютного контейнера и подвески парашютной системы;
-
• посадочная твердотопливная двигательная установка;
-
• посадочное устройство;
-
• амортизационные кресла космонавтов [5].
Средства приземлениявозвращаемого аппарата
На этапе технического проектирования корабля было рассмотрено несколько вариантов построения средств приземления. Проведенный анализ показал, что приемлемым вариантом по массе и надежности является применение парашютно-реактивной системы с использованием посадочной твердотопливной двигательной установки и посадочных устройств [6].
Трехкупольная парашютная система выполняет гашение скорости после схода с орбиты до скорости парашютирования V в = 6,5 ± 1,5 м/с, при отказе одного парашюта — до V в = 8,0 ± 1,7 м/с. Отстрел лобового теплозащитного экрана происходит на высоте ~500 м. Далее, с помощью управляющих ракетных двигателей системы исполнительных органов спуска осуществляется разворот ВА блоком гашения горизонтальной скорости по ее направлению. Посадочная твердотопливная двигательная установка обеспечивает гашение скорости ВА на момент приземления до значений вертикальной и горизонтальной составляющих V в = 0 м/с; V г = 0 м/с как при штатном раскрытии парашютов, так и при отказе одного купола, а также при скорости ветра до 15 м/с. Последними в работу вводятся четыре посадочные опоры (рис. 1), предназначенные для исключения опрокидывания и обеспечения многоразовости ВА, гашения возможных остаточных скоростей после работы двигательной установки ( V в до 3,0 м/с; V г до 3,0 м/с), обусловленных следующими факторами:
-
• возможными угловыми отклонениями ВА на парашютной системе;
-
• погрешностями системы управления корабля и двигательной установки;
-
• воздействиями струй двигательной установки на грунт на посадочной площадке [7].
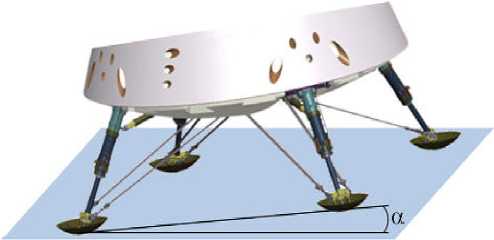
Рис. 1. Общий вид посадочных опор: α — угол тангажа
Предусматривается возможность блокировки выпуска посадочных опор при прогнозировании посадки в неблагоприятных по рельефу условиях или на водную поверхность.
Методика проведения копровых испытаний
Копровые испытания являются основополагающим видом проверок, по результатам которых принимается решение о соответствии характеристик разработанных составных частей средств приземления требованиям, заявленным в техническом задании Заказчика, оцениваются полнота и степень отработки документации, а также делается вывод о возможности начала комплексных дорогостоящих и технологически сложных видов испытаний, например таких, как вертолетные и комплексные испытания систем аварийного спасения и средств приземления ВА.
Целями копровых испытаний являются:
-
• совместная отработка и оценка функционирования посадочных опор, амортизационных кресел и конструкции ВА в штатных и расчетных нештатных условиях посадки;
-
• проверка и оценка устойчивого движения ВА по грунту без переворотов при штатных условиях посадки на выпущенные посадочные опоры;
-
• проверка функционирования конструкции ВА и его оборудования для обеспечения безопасности экипажа в условиях посадки при расчетных нештатных ситуациях;
-
• определение ударных воздействий на конструкцию, оборудование и антропометрически подобные манекены, размещенные в амортизационных креслах [8], с целью подтверждения физиологической переносимости и безопасности экипажа как при штатном приземлении, так и при нештатных ситуациях.
Экспериментальная установка
Для проведения полного цикла испытаний необходимо создание сложнейшей экспериментальной установки и использование большого количества высокотехнологичных привлекаемых средств:
-
• комплекта наземного технологического оборудования амортизационных кресел космонавтов;
-
• контрольно-эксплуатационной аппаратуры системы бортовых измерений;
-
• комплекса проверки аккумуляторной батареи;
-
• комплекта контрольно-проверочной аппаратуры посадочного устройства;
-
• комплекса автоматизированной обработки телеметрической информации.
Экспериментальная установка состоит из специализированного стенда и макета
ВА для копровых испытаний. Специализированный стенд обеспечивает задаваемые в разрабатываемой программе и методике испытаний условия приземления макета, регистрацию и запись кинематических и динамических параметров макета и посадочных опор. В составе стенда предусмотрены основная силовая рама для монтажа систем и макета, посадочная площадка, система обеспечения кинематических параметров, система обеспечения безопасности эксплуатации, комплект монтажных частей, комплект такелажных средств, система видеорегистрации процесса испытания, система регистрации параметров для их последующего анализа, система управления стендом, промежуточная рама для крепления макета к системе обеспечения кинематических параметров. На рис. 2 показан общий вид такого специализированного стенда.
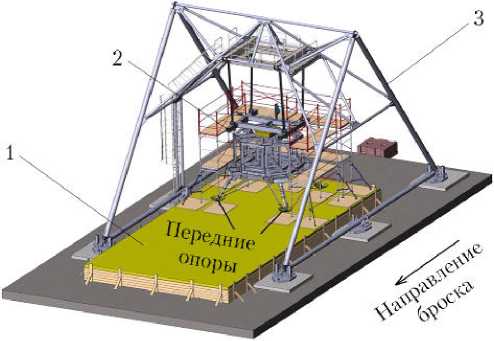
Рис. 2. Общий вид специализированного стенда: 1 — посадочная поверхность; 2 — отладочный грузомакет; 3 — специализированный стенд
Макет возвращаемого аппарата
Макет ВА (с макетом лобового теплозащитного экрана) оснащен габаритно-массовыми макетами приборов и агрегатов и изготовлен по штатной документации, с исполнением конструкции, жесткостны-ми и инерционно-центровочными характеристиками, максимально приближенными к летному варианту. Возможные отличия в массово-центровочных и инерционных характеристиках компенсируются балансировочными грузами по результатам определения действительных значений массы и центра масс на специальном высокоточном оборудовании. В амортизационных креслах размещаются антропометрически подобные манекены с установленной на них датчиковой аппаратурой. Макет комплектуется системой бортовых измерений для регистрации телеметрических параметров с ударных датчиков и датчиков давления, размещаемых на конструкции макета. Макет изготавливается в двух экземплярах для обеспечения проведения всех планируемых циклов испытаний (включая аварийные режимы).
На заводе-изготовителе макет оснащается всеми необходимыми для проведения копровых сбросов средствами. На внешнюю поверхность макета наносятся контрастные маркеры для более точного определения положения при обработке материалов видеосъемки. На элементы конструкции устанавливаются необходимые ударные датчики и датчики давления, система бортовых измерений и аккумуляторная батарея для ее питания.
По прибытии к месту проведения испытаний проводятся осмотр конструкции макета и отладка стенда с помощью грузомакета (вертикальный и наклонный сбросы).
На рис. 3 и 4 приведены схемы организации отладочных сбросов грузомакета.
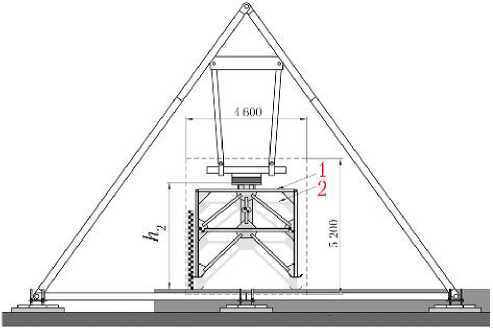
Рис. 3. Вертикальный сброс: 1 — грузомакет в начальной точке; 2 — грузомакет в точке падения; h2 — высота сброса грузомакета, варьируется в зависимости от режима испытаний
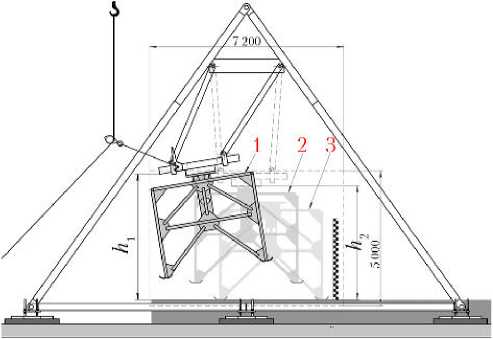
Рис. 4. Наклонный сброс: 1 — грузомакет в начальной точке траектории; 2 — в точке отделения от стенда; 3 — в месте падения; h1, h2 — соответственно, начальная высота и высота сброса грузомакета, варьируются в зависимости от режима испытаний
Результаты регистрации параметров, полученные в ходе отладочного испытания, анализируются, вносятся уточняющие изменения в циклограмму работы стенда. На макет устанавливается дополнительная датчиковая аппаратура для регистрации динамических и кинематических параметров. Макет устанавливается в стенд посредством промежуточной рамы из состава стенда. Через разъем, выведенный на гермоплату, от пульта управления подключается кабель для подачи команд на включение питания системы бортовых измерений, а также на взведение посадочных опор.
Отделение макета от стенда происходит в расчетный момент путем подрыва пироболтов, соединяющих стенд и макет посредством промежуточной рамы.
В настоящее время предусматривается проведение семи копровых сбросов макетов. Для парирования возможных ошибок в разработанной математической модели посадки ВА, оценки ее адекватности и оперативной корректировки рассматривается способ организации проведения испытаний, при котором решение о назначении конкретных условий испытания (реализуемые составляющие скоростей в момент контакта с посадочной поверхностью, угол тангажа, азимутальная ориентация поперечной плоскости макета относительно вектора горизонтальной скорости, угловая скорость макета в плоскости качания, плотность грунта посадочной поверхности) принимается после каждого предыдущего испытания, что позволяет в полной мере воспроизвести все возможные режимы приземления ВА с экипажем.
Анализ предполагаемых нештатных ситуаций в процессе посадки позволяет определить предварительный перечень штатных и расчетных нештатных режимов проведения испытаний (табл. 1).
После каждого сброса проводится визуальный контроль и дефектация макета и посадочного устройства. По результатам каждого сброса анализируются видеозаписи со скоростных видеокамер и видеокамер с нормальной скоростью записи (в т. ч., установленные внутри командного отсека ВА), а также телеметрическая информация, полученная с ударных датчиков и датчиков давления, датчиков системы регистрации параметров, сравниваются прогнозные и реальные значения параметров движения, корректируется математическая модель динамики посадки.
Модель динамики посадки возвращаемого аппарата
Для моделирования динамических процессов механических систем может, как показывает практика, применяться один из следующих подходов:
-
• использование готовых специализированных программных продуктов;
-
• разработка собственного инструмента под конкретную задачу [9];
-
• рациональное сочетание этих двух подходов.
Модель динамики процесса посадки разработана в специализированной системе виртуального моделирования механических процессов MSC Adams .
Таблица 1
Предварительный перечень штатных и расчетных нештатных режимов проведения испытаний
|
№ сброса |
№ макета |
V в, м/с |
V г, м/с |
а, ° |
Направление движения |
|
Режимы штатной посадки |
|||||
|
1 |
1 |
3,0 |
0 |
0 |
— |
|
2 |
1 |
3,0 |
0 |
15 |
— |
|
3 |
1 |
3,0 |
3,0 |
15 |
III полуплоскостью вперед, наклон по углу тангажа в III полуплоскость |
|
Режимы расчетной нештатной посадки |
|||||
|
4 |
1 |
3,0 |
3,0 |
10 |
III полуплоскостью вперед, наклон по углу тангажа в III полуплоскость, невыпуск одной стойки |
|
5 |
1 |
7,0 |
0 |
0 |
Посадочные опоры штатно выпущены, отказ посадочной твердотопливной двигательной установки |
|
6 |
2 |
4,5 |
15,0 |
10 |
II (или IV) полуплоскостью вперед, лобовой теплозащитный экран не отстрелен, посадочное устройство не выпущено |
|
7 |
2 |
7,0 |
10,0 |
10 |
III полуплоскостью вперед, наклон по углу тангажа в III полуплоскость, посадочное устройство штатно выпущено, отказ посадочной твердотопливной двигательной установки |
Особенностью разработки модели в Adams является отсутствие необходимости составления уравнений движения и уравнений связей, так как они формируются автоматически в зависимости от топологии механической системы, характеристик тел и типов соединений между ними. Основное внимание уделяется разработке силовых факторов, управлению процессом решения и анализу данных моделирования.
На рис. 5 представлен состав посадочной опоры, на рис. 6 — силовые факторы, действующие в процессе посадки. Важно отметить, что тросы и раздвижной упор моделируются силовыми факторами, массы этих элементов не учитываются.
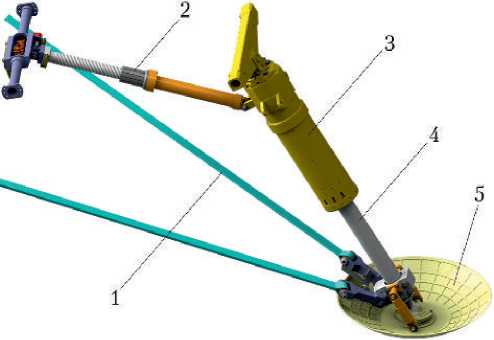
Рис. 5. Состав посадочной опоры: 1 — трос; 2 — раздвижной упор; 3 — стойка; 4 — шток; 5 — тарель
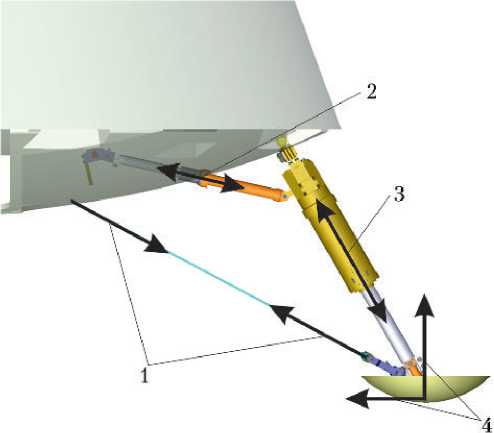
Рис. 6. Силовые факторы в посадочной опоре: 1 — трос; 2 — раздвижной упор; 3 — амортизатор; 4 — вертикальная и горизонтальная составляющие реакции грунта
В процессе контакта с посадочной поверхностью гашение кинетической энергии, которой обладает ВА, выполняет посадочное устройство. Интенсивность гашения энергии главным образом зависит от выбора силового профиля амортизатора посадочного устройства [10]. Наполнитель амортизатора представляет собой сотовую конструкцию, которая отличается отсутствием восстанавливающей силы, позволяющей вернуться в исходное положение после остаточной деформации. На рис. 7 изображена силовая характеристика амортизатора. Данная характеристика является оптимальной с точки зрения удовлетворения требований, предъявляемых к процессу посадки в штатных условиях.
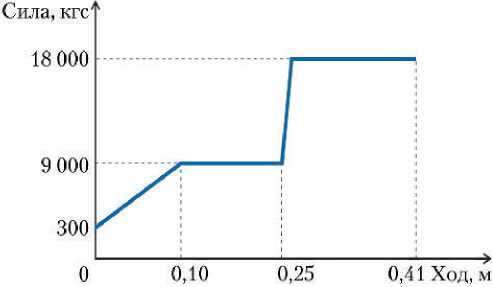
Рис. 7. Силовая характеристика амортизатора
С грунтом посадочное устройство взаимодействует тарелями. Реакция грунта посадочной поверхности зависит от модели грунта и формы тарели. Грунт интерпретируется реологической моделью Фойгта для тарели сферической формы. В расчетах использовались характеристики для мягкого и жесткого грунтов (табл. 2). Вертикальная составляющая силы реакции грунта RY вычисляется по формуле
RY = KV KG ( C ∆ + η Δ ′ ), где ∆ — интегральная функция деформации грунта; ∆′ — ее производная по времени; C , η — коэффициенты жесткости и демпфирования, соответственно; KV и KG — коэффициенты, учитывающие влияние начальных вертикальной и горизонтальной компонент скорости взаимодействия.
Таблица 2
Коэффициенты модели грунта
|
Тип грунта |
C , кгс/м3 |
η, кгс·с/м3 |
f 0 |
|
Прочные грунты (глина и суглинок в твердом состоянии, гравелистый грунт, мерзлый грунт) |
6·107 |
9·104 |
0,55 при V к ≥ 0 м/с |
|
Слабые грунты (глина и суглинок в пластическом состоянии, супесь и пылевидные пески средней плотности) |
8·105 |
6·103 |
0,35 при V к ≤ 1,5 м/с 0,3 V к0,37 при V к > 1,5 м/с |
Для тарели сферической формы:
∆ = (π/3)y2(3r – y), где r = 0,51 м — радиус сферы тарели; y — заглубление тарели по нормали к поверхности грунта, м. Горизонтальная составляющая силы реакции грунта RX вычисляется по формуле:
RX = RY f0, где f0 — коэффициент сопротивления грунта горизонтальному движению тарели, являющийся функцией касательной составляющей скорости тарели Vк в момент каждого ее внедрения в грунт. Горизонтальная составляющая силы реакции грунта полагается направленной всегда в сторону, противоположную скорости касательного движения тарели.
Сила в тросе, возникающая при его растяжении, вычисляется согласно следующей формуле
F ^'^'д, тР / , где EF1, EF2 — жесткости тросов в форме EF; ∆ — удлинение троса; l0 = 2,375 м — длина троса в нерастянутом состоянии.
Жесткости в форме EF определяются по формулам:
EF 1 = EF 1min + ( EF 1max – EF 1min );
EF2 = EF2min + (EF2max – EF2min), где EF1min = 2,2 ⋅ 105 кгс; EF1max = 9,7 ⋅ 105 кгс; EF2min = 11 ⋅ 105 кгс; EF2max = 21 ⋅ 105 кгс — минимальные и максимальные жесткости тросов.
Усилие в раздвижном упоре складывается из пневматической и механической составляющих. Пневматическая составляющая обусловлена постоянным давлением в полости раздвижного упора и принимается всегда равной 500 кгс. Механическая составляющая обусловлена сопротивлением сжатию упора со стороны сот (3 000 кгс), после исчерпания сжатия сот — срезанием зубцов (5 000 кгс) (рис. 8).
На рис. 9 представлены вертикальное и горизонтальное линейные ускорения в центре масс ВА при посадке на прочный грунт для случаев со всеми выпущенными посадочными опорами. Посадка на прочный грунт дает наибольшие нагрузки на аппарат и конструкцию, в то время как посадка на слабый грунт может способствовать перевороту в отдельных случаях.
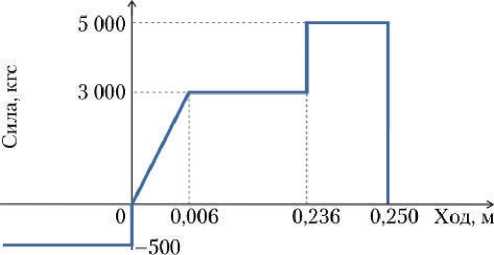
Рис. 8. Силовая характеристика раздвижного упора
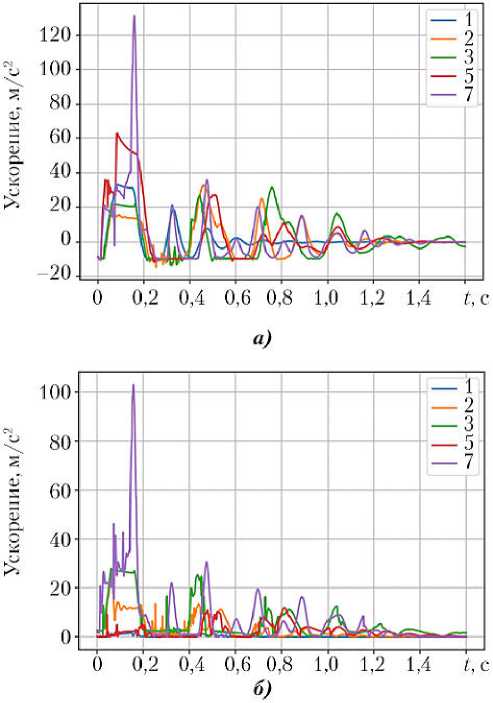
Рис. 9. Составляющие линейного ускорения в центре масс ВА при посадке на прочный грунт для случаев со всеми выпущенными посадочными опорами: а — вертикальная; б — горизонтальная; ■ — первый сброс; ■ — второй сброс; ■ — третий сброс; ■ — пятый сброс; ■ — седьмой сброс
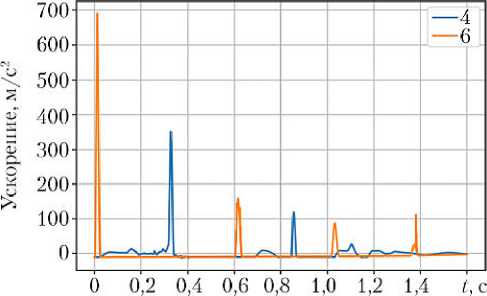
На рис. 10 представлены вертикальное и горизонтальное линейные ускорения в центре масс ВА при посадке на прочный грунт для случаев с нераскрытой одной опорой и посадке на днище, когда все опоры остались в сложенном положении.
По результатам моделирования посадки на прочный грунт можно сделать вывод, что в штатных условиях ускорения не превышают допустимых значений. Критичными же случаями можно назвать частичный или полный отказ выпуска ПУ и посадку в случае отказа посадочной твердотопливной двигательной установки.
a)
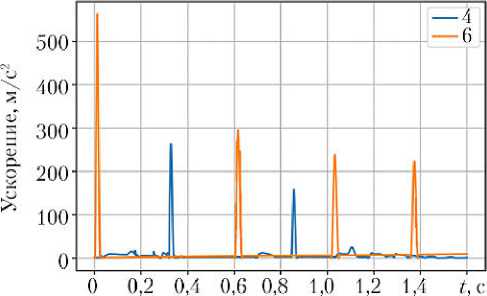
Рис. 10. Составляющие линейного ускорения в центре масс ВА при посадке на прочный грунт для случаев с нераскрытой одной опорой и посадке на днище, когда все опоры остались в сложенном положении: а — вертикальная; б — горизонтальная; ■ — четвертый сброс; ■ — шестой сброс
Предложенная методика позволяет проводить моделирование динамики посадки ВА и может использоваться на всех этапах разработки ПТК.
Заключение
В настоящей статье освещаются некоторые вопросы организации проведения копровых испытаний, приводится назначение и состав средств приземления ПТК, описывается концепция работы средств приземления. Разработанная методика моделирования процесса динамики посадки позволяет еще на этапе разработки перспективных изделий ракетно-космической техники анализировать правильность принимаемых решений, выявлять ключевые параметры, влияющие на весь процесс приземления, исследовать безопасность посадки.
Список литературы Методика проведения и моделирование режимов копровых испытаний возвращаемого аппарата пилотируемого транспортного корабля
- Ракетно-космическая корпорация «Энергия» им. С.П. Королёва во втором десятилетии XXI века. 2011-2015. М.: РКК «Энергия», 2016. 895 с.
- Микрин Е.А. Перспективы развития отечественной пилотируемой космонавтики (к 110-летию со дня рождения С.П. Королёва)//Космическая техника и технологии. 2017. № 1(16). С. 5-11.
- Рабинович Б.А. Безопасность космонавта при посадочном ударе спускаемого аппарата о грунт. М.: Книга и бизнес, 2014. 278 с.
- Барер А. С. Предел переносимости: Очерки об устойчивости человека к неблагоприятным факторам авиационного и космического полетов. М.: БЛОК-Информ-Экспресс, 2012. 427 с.
- Draft environmental assessment of issuing an experimental permit to SpaceX for operation of the DragonFly vehicle at the McGregor test site, Texas. Federal Aviation Administration. May 2014. Режим доступа: https://www.faa.gov/about/office_org/headquarters_offices/ast/media/20140513_ DragonFly_DraftEA%28Public%29.pdf (дата обращения 11.04.2018 г.)
- Антонова Н.П., Брюханов Н.А., Четкин С.В. Средства посадки пилотируемого транспортного корабля нового поколения//Космическая техника и технологии. 2014. № 4(7). С. 21-30.
- Архипов А.Б., Брюханов Н.А., Дементьев В.К., Дядькин А.А., Комаров В.В., Пономарев Н.Б., Пономарев А.А. Экспериментальные исследования характеристик посадочной двигательной установки пилотируемого транспортного корабля и газодинамического воздействий струй на посадочную поверхность//Космическая техника и технологии. 2016. № 4(15). С. 43-56.
- Ellis S. 2016. NASA Langley Research Center. NASA Crash-Test dummies suit up for action. Режим доступа: https://www.nasa. gov/feature/langley/nasa-crash-test-dummies-suit-up-for-action on May (дата обращения 04.08.2017 г.)
- Борзых С.В., Воронин В.В., Щиблев Ю.Н. Анализ динамики процесса посадки для различных схем опор посадочного устройства возвращаемого аппарата//Вестник Самарского государственного аэрокосмического университета. 2013. № 4(42). С. 86-93.
- Aslanov V., Kruglov G., Yudintsev V. Newton-Euler equations of multibody systems with changing structures for space applications//Acta Astronautica. 2011. V. 68. № 11-12. Р. 2080-2087.
