Методика расчета системы обезвешивания крупногабаритных трансформируемых элементов космических аппаратов при наземных испытаниях

Автор: Беляев А.С., Филипас А.А., Цавнин А.В., Тырышкин А.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.22, 2021 года.
Бесплатный доступ
В данной работе рассмотрена методика расчета системы обезвешивания элементов космических аппаратов при их наземных испытаниях с учетом вариантов раскрытия, условий обезвешивания, типов и вариантов исполнения систем обезвешивания. Приведен пример расчета для 3-секционной солнечной батареи без балки с неполным обезвешиванием и с минимизацией моментов в шарнирах. В качестве алгоритма определения параметров системы обезвешивания, позволяющих получить минимальные моменты в шарнирах, использованы генетические алгоритмы. Произведена проверка моментов и сил, действующих в системе с помощью построения эпюр в развернутом состоянии. Кроме того, выполнена проверка на соблюдение заданного расстояния, исходя из конструкторских ограничений, между точками приложения сил обезвешивания.
Обезвешивание, космические аппараты, тестирование в земных условиях, системы автоматического управления, параметрическая неопределенность
Короткий адрес: https://sciup.org/148322008
IDR: 148322008 | УДК: 531.133.3 | DOI: 10.31772/2712-8970-2021-22-1-106-120
Methodology for calculating the de-weighting system of large-sized transformable elements of space vehicles for ground tests
This paper considers the methodology for calculating the de-weighting system of spacecraft elements for ground tests, taking into account the deployment options, de-weighting conditions, types and options of de-weighting systems. An example of calculation for a 3-section solar battery without a beam with incomplete de-weighting and with minimization of moments in the hinges is given. Genetic algorithms are used as an algorithm for determining the parameters of the de-weighting system, which allows obtaining the minimum moments in the hinges. The moments and forces acting in the system were checked by plotting diagrams in the expanded state. In addition, a check for compliance with the specified distance, based on design constraints, between the points of application of the weighting forces was made.
Текст научной статьи Методика расчета системы обезвешивания крупногабаритных трансформируемых элементов космических аппаратов при наземных испытаниях
Введение. Современное состояние космических технологий предполагает базирование в ближнем и дальнем космосе большого количества систем движительного, энергетического и информационного назначения. Технические требования к этим системам, наряду с высокой надёжностью, безопасностью и эффективностью, содержат жесткие массогабаритные показатели. Средства доставки накладывают ограничения на массогабаритные характеристики космических аппаратов, что, в свою очередь, вынуждает прибегать к использованию конструкций складного типа. Для гарантированно успешного развертывания космических аппаратов крайне необходимо провести наземные испытания всех систем. Одним из ключевых аспектов испытаний космических аппаратов является расчёт механической прочности для условий невесомости, что существенно усложняет проведение натурных испытаний оборудования в условиях присутствия гравитации. Основным методом решения этих проблем является разработка специальных систем обезвешивания, которые с учётом требований к процессу раскрытия и особенностей конструкции позволяют в наземных условиях проводить испытания во всех возможных режимах развёртывания и функционирования.
Выделяют системы обезвешивания 3-х типов: пассивные, пассивно-активные и активные. В свою очередь, все представленные типы систем обезвешивания могут быть опорного или тросового исполнения. Пассивные системы обезвешивания в своей основе используют противовес для компенсации веса элемента обезвешивания (ЭО). Системы данного типа просты в конструкторском исполнении и не являются дорогостоящими, однако неспособность менять силы обезвешивания в процессе раскрытия является существенным недостатком, поскольку возникновение динамических моментов сопротивления, получаемых из-за ошибки обезвешива-ния, не может быть скомпенсировано. Еще одним недостатком данного типа систем обезвеши-вания являются большие массогабаритные характеристики. Использование управляемого электро- или гидропривода в качестве устройства, создающего силу обезвешивания, позволяет осуществлять изменение силы обезвешивания в процессе раскрытия, а также снизить массогабаритные характеристики системы. Такие системы получили название пассивно-активные [4; 5]. Однако перемещение самой системы обезвешивания, как и в случае с пассивными системами, осуществляется за счет движения ЭО, что приводит к появлению моментов трения в шарнирах, «эффекта присоединенных масс», а также к неточностям расчетов энергетики системы раскрытия элементов космических аппаратов. Данные недостатки полностью устранены в активных системах обезвешивания, движение которых осуществляется за счет установленных электродвигателей [6–8]. Стоит отметить, что в силу сложности алгоритмов управления для данного типа систем, корректное конфигурирование контуров управления в ряде случаев является затруднительным, а также приводит к существенному увеличению стоимости данного технического решения. Таким образом, задача однозначного выбора типа системы обезвешива-ния с учетом конкретной технической задачи остается нерешенной.
Описание предлагаемой методики. В настоящей работе предлагается методика расчета системы обезвешивания для наземных испытаний космических аппаратов, включающая 10 шагов, представленных далее.
Шаг 1. Многообразие крупногабаритных трансформируемых конструкций (КТК) приводит разработчиков к необходимости рассматривать задачу проектирования системы обезвешивания исходя из специфики каждого отдельно взятого объекта. Однако для систематизации расчетов можно классифицировать КТК по способу развертывания (складывания), в основе которой – траектории движения связанных масс (объемное, радиальное, линейное, комбинированное и т. д.). Отличия в траекториях раскрытия и в механике систем оказывает влияние на процесс расчета системы обезвешивания. Именно поэтому на первом этапе необходимо выбрать тип обезвешиваемого элемента, который, в большинстве случаев, определен непосредственно в поставленной перед исполнителями задаче.
Шаг 2. По завершении первого шага необходимо определиться с ограничениями и допусками по обезвешиванию. К характеристикам, влияющим на качество обезвешивания, относятся моменты в шарнирах, центробежные моменты, динамические и статические моменты инерции. Таким образом, на данном этапе производится выбор необходимого условия обезвешивания, исходя из технологических требований, предъявляемых к ЭО. Далее детально рассмотрим возможные варианты обезвешивания, исходя из требований.
Наиболее распространенным вариантом является полное обезвешивание, при котором происходит полная компенсация веса ЭО и ограничение моментов до максимально допустимых значений, исходя из предварительных конструкторских расчетов по условиям механических прочностей, допустимых деформаций и т. д. Выполнение данного условия возможно при полной компенсации веса ЭО по их центрам масс или же использовании нескольких устройств обезвешивания для одного ЭО. Однако в таких случаях, за счет ошибки обезвешивания, создаются дополнительные моменты трения шарниров. Для такого рода условий возможно применение всех типов систем обезвешивания.
Вторым вариантом является компенсация моментов или сил в произвольных точках, например, в центрах масс ЭО или в шарнирах. Данная задача актуальна в большинстве случаев, поскольку при раскрытии элементов космических аппаратов в ходе земных экспериментов наибольшую проблему вносят моменты трения в шарнирах, которые мешают процессу раскрытия и уменьшают энергию системы раскрытия. Кроме того, в процессе раскрытия возникают отклонения от штатного режима в части ускорений, неравномерности, влияния системы обезве-шивания, сопротивления воздуха и т. д. Для такого рода ограничений возможно применение исключительно активных систем обезвешивания, поскольку иного рода системы будут создавать моменты трения в шарнирах, вызванные «эффектом присоединенных масс».
Третьим вариантом является компенсация центробежных, динамических и статических моментов инерции, появляющихся в процессе раскрытия. Данный вариант не так распространён, однако при использовании опорных систем обезвешивания данные моменты приводят к «заламыванию» шарниров, что приводит к нарушению функционирования системы и ее выходу из строя.
После выбора основных условий обезвешивания, необходимо определиться с количеством устройств или элементов, из которых состоит система.
Шаг 3. С точки зрения прочностных расчетов ЭО существуют максимально допустимые усилия, которые может выдержать ЭО в критических и (или) произвольно заданных точках, в том числе и в шарнирах. Таким образом, необходимым условием работоспособности системы является то, что момент в любой точке конструкции должен быть меньше максимально допустимого. Исходя из этого факта, необходимо определить минимально необходимое количество элементов системы обезвешивания. Для этого применяется принцип декомпозиции – ЭО необходимо рассмотреть как систему, состоящую из отдельных участков, на которые действует распределенная нагрузка, равная весу ЭО, ограниченных точками взаимодействия с элементами системы обезвешивания. После чего необходимо определить точку, в которой сосредоточен максимальный момент, действующий на участке, и определить зависимость между длиной участка и моментом в данной точке. Имея данную зависимость и предельно допустимый момент, полученный из прочностных расчётов, можно определить максимальную длину одного участка и, как следствие, минимально необходимое количество элементов системы обезвешивания.
Шаг 4. После определения минимального количества элементов системы обезвешивания необходимо произвести расчет эпюр и моментов, действующих в системе. Для этого вначале необходимо определить зависимости между параметрами системы обезвешивания и параметрами ЭО. В качестве параметров системы обезвешивания используются положение точки закрепления элемента ( xi ) системы обезвешивания к i -му ЭО и сила компенсации веса Pi , i = 1, N , где N – количество ЭО. В качестве параметров ЭО на данном этапе используются вес Fi и длина элемента Li .
Следует отметить, что максимально допустимые усилия могут иметь различные значения в разных точках и, соответственно, эпюры нагрузок могут иметь сложный вид, а расчёты точки (точек) максимально допустимого момента будут не единичны.
Другой особенностью является возможная неравномерная по длине механическая прочность конструкции, что можно учесть эпюрой переменного по длине допустимого момента.
На данном этапе следует учитывать выбранный тип обезвешиваемого элемента, в частности, объект с линейной траекторией может быть представлен как жесткозакрепленная балка в силу его прямолинейной формы в развернутом состоянии, а также наличие шарниров исполнения повышенной жесткости для исключения возможного люфта и нивелирования упругих колебаний вдоль вертикальной оси движения. В случае радиального характера раскрытия, конструкция будет представлена разделенной на части шарнирами в силу последовательного характера раскрытия.
Поскольку в большинстве случаев число уравнений, полученных в результате расчета эпюр, будет больше числа неизвестных, данную задачу можно решить как задачу оптимизации, а в качестве функционала для минимизации использовать условия, полученные в шаге 2, т. е.:
– минимизация моментов в точках;
– минимизация сил;
– минимизация центробежных и динамических моментов инерции.
Шаг 5. В процессе работы системы обезвешивания могут возникать различного рода конструкторские ограничения, наиболее распространённым является невозможность присоединения элемента системы обезвешивания непосредственно к центру масс обезвешиваемого элемента. Кроме того, возможны варианты, когда траектории движения обезвешиваемых элементов будут пересекаться во времени, что приведет к столкновениям и неработоспособности системы обез-вешивания. В настоящее время такого рода проблемы решают путем многоуровневых траекторий движения или с использованием различных обводных устройств, что исключает столкновения в принципе и при этом значительно усложняет конструкцию системы, однако для ряда задач такого рода решения использовать невозможно. Исходя из этого, на данном этапе необходимо определить основные ограничения, накладываемые на параметры и конструкцию системы обезвешивания.
Шаг 6. После учета ограничений и решения задачи минимизации основного условия обез-вешивания, выбранного в шаге 2, получаем параметры системы обезвешивания.
Шаг 7. Определив параметры системы обезвешивания, необходимо осуществить проверку полученных результатов с учетом выбранного условия обезвешивания, например, на максимально допустимый, с точки зрения энергетики системы раскрытия, момент в шарнире и проверку раскрытия системы с учетом конструкторских ограничений, на основе использования кинематических уравнений работы системы. Для этого необходимо решить прямую задачу кинематики и убедиться в том, что системы обезвешивания не имеют пересечений по построенным траекториям движения.
В случае невыполнения одного из условий необходимо вернуться к шагу 3 и увеличить количество элементов на 1 и повторить шаги 4–7. Если все условия были выполнены, то можно переходить к выбору типа системы обезвешивания.
Шаг 8. Следующим этапом является определение типа и исполнения системы обезвешива-ния с учетом условий, описанных выше. В качестве активных систем обезвешивания наибольшее применение получили именно тросовые системы, основанные на применении кареток, движущихся по закрепленным рельсам, на которые установлены электроприводы, создающие силу компенсации и передвигающие каретки. Такие системы применяют как для обезвешива-ния элементов космических аппаратов [8], так и для компенсации веса больных пациентов в медицине [9]. Однако, вследствие того, что в сложенном состоянии элементы космического аппарата находятся непосредственно у его корпуса, возникает необходимость использования сложных конструкторских обводов. Данную проблему может решить система, состоящая из наклонных тросов, применяемая в медицине [10]. Система может состоять из 4-х, 8-ми и большего числа тросов и, за счет изменения силы натяжения и их длины, перемещать обезвешивае-мую конструкцию [11]. Кроме того, возможно использование каретки с установленной на ней наклонными тросовыми системами, что позволит увеличить быстродействие отработки системой отклонения при обезвешивании. Варианты тросовых систем обезвешивания представлены на рис. 1.

Рис. 1. Варианты тросовых систем обезвешивания
Fig. 1. Variants of rope weightlessness imitation systems
Другим решением является использование опорных систем обезвешивания [12], в качестве которых могут применяться робототехнические платформы с установленной на них опорой и системой, позволяющей определять и отслеживать изменение положения обезвешиваемого элемента с учётом требований к формированию момента (силы) компенсации веса в точке приложения.
Шаг 9. Предпоследним этапом является синтез системы автоматического управления. Рассматривая процесс работы как тросовых, так и опорных систем обезвешивания, вследствие движения ЭО вдоль оси раскрытия возникает ошибка отклонения между его положением и элементом системы обезвешивания. При перемещении вдоль нескольких осей возникает ошибка в виде направленного вектора, который и необходимо компенсировать.
Шаг 10. Заключительным этапом является проверка работы всей системы с учетом динамики раскрытия, которая может быть последовательной, одновременной и комбинированной. Динамика раскрытия влияет на распределения сил и моментов, поэтому необходимо учитывать вариант раскрытия при расчете системы обезвешивания. Наиболее часто применяемыми ва-риантами являются последовательное и одновременное раскрытия, которые вносят несущественные воздействия в расчет системы обезвешивания. Однако возникновение нештатных ситуаций приводит к существенным изменениям динамики раскрытия и, как следствие, к момен- там и силам, действующим в системе в процессе раскрытия. Из всего вышеизложенного необходимо производить динамическую проверку работоспособности системы обезвешивания, т. е. отработки основного условия обезвешивания при разных вариантах раскрытия, как штатных, так и нештатных.
На этом этапе возможно определение моментов инерции элементов механической системы, в том числе и переменных. Особенностью этапа следует отметить определение интервалов изменения механических параметров (для динамики и статики). В процессе раскрытия солнечных панелей космического летательного аппарата изменяются соотношения положений обезвеши-ваемых элементов, что приводит к усложнению кинематики панели, что, в свою очередь, вносит дополнительную структурную неопределенность, обусловленную изменением порядка системы дифференциальных уравнений. В процессе раскрытия солнечной панели космического летательного аппарата, при начале движения каждого из элементов изменяется их влияние на динамику друг друга, что, соответственно, усложняет параметрическую неопределенность, которая, в данном случае, будет описываться не интервальным, а аффинным, полилинейным или полиномиальным типами параметрической неопределенности [13; 14]. Усложнение типа параметрической неопределенности существенно усложняет процедуру синтеза системы управления. Схема методики расчета представлена на рис. 2.
Пример расчета системы обезвешивания солнечной батареи
Шаг 1. В качестве объекта для демонстрации работы методики расчета используем линейно раскрывающуюся солнечную батарею без балки, состоящую из 3-х панелей. В данном расчете балкой солнечной батареи допустимо пренебречь ввиду незначительной массы по отношению к весу солнечной панели. Массу панелей возьмем равной 40 кг, длину каждой панели 4 м. В качестве ограничений примем следующее утверждение: в сложенном состоянии расстояние между точками приложение обезвешивающих сил должно быть не менее 0,6 м.
Шаг 2. В качестве условия обезвешивания выберем частичное обезвешивание с минимизацией моментов в шарнирах между ЭО. При условии, что сумма сил в опорах должна быть равна сумме весов обезвешиваемых элементов, параметры системы обезвешивания должны быть выбраны исходя из необходимости минимизировать моменты в шарнирах.
Шаг 3. Предположим, что максимальный момент, который может выдержать панель, составляет 0,24 кНм. Тогда, как было рассмотрено ранее, обезвешиваемую конструкцию можно рассмотреть в виде участка, ограниченного 2-мя опорами, на который действует распределенная нагрузка q равная отношению веса панели, к ее длине, т. е.:
F q = — = 0,1, кН/м, L где F - вес панели, равный 400 Н; L - длина панели, равная 4 м.
Пусть с левой стороны участок ограничен опорой А , в которой будет действовать сила реакции R A , а с правой стороны опорой В , в которой будет действовать сила реакции R B , причем данные силы будут равны. Тогда получаем, что при расчете эпюр данной системы максимальный момент будет находиться в центре балки, для определения которого необходимо рассчитать реакцию опоры в точке А или В :
l 2 ql ra = rb = ^ = q ^.
Выбор типа обезвешиваемого элемента
Линейно, радиально и объемно раскрываемый обезвешиваемый элемент
Определение точки рассмотрения обезвешиваемого элемента с точки механической системы
Выбор основного условия обезвешивания
Полное обезвешивание, частичное обезвешивание
Основное условие обезвешивания – минимизируемый функционал
Проверка на статическое расположение и на отсутствие столкновений в процессе раскрытия
Расчет минимально необходимого количества элементов системы обезвешивания
Получение зависимостей между параметрами систе мы обезвешивания и параметрами обезвешиваемого элемента
Определение конструкторских ограничений системы обезвешивания
Ограничения на силы обезвешивания, положение приложения сил
Определение зависимостей между основными воздействиями в системе и параметрами системы обезвешивания
Ограничения на силы обезвешивания, положение приложения сил
Увеличение количества элементов системы обезвешивания на 1
|
Расчет оптимальных |
Использование методов |
|
параметров системы |
динамического |
|
обезвешивания с |
программирования, |
|
учетом основного |
методов оптимизации |
|
условия |
или генетических |
|
обезвешивания |
алгоримов |
Проверка полученных параметров
Параметры не удовлетворяют
Параметры удовлетворяют
Выбор типа системы обезвешивания
Опорная или тросовая система. Пассивная, активно-пассивная, активная
Синтез алгоритма системы обезвешивания
Следящая система, предиктивное управление, управление с эталонной моделью
Проверка работоспособност и системы обезвешивания на динамической модели
Рис. 2. Схема методики расчета
Fig. 2. Calculation method workflow
Тогда момент в любой точке балки можно определить следующим образом:
M ( x ) = - q2- + RA . x .
Рассчитав момент в середины балки (1) получаем следующую зависимость длины участка от момента (2) с численным решением для приведенного примера:
M

q • 12
8,
l = /8 • M max q
1 8 • 0,24
0,1
= 4,38, м.
Следовательно, так как общая длина обезвешиваемой конструкции составляет 12 м, то необходимо минимум 4 опоры, одной из которых, будет являться корпус космического аппарата. В результате на данном шаге было определено минимально необходимое количество дополнительных опор, равное 3, для обезвешивания солнечной панели.
Шаг 4. Перейдем к определению зависимостей между силами и моментами, действующими в системе. Рассмотрим солнечную батарею в конечном, развернутом состоянии. Поскольку для солнечных панелей шарниры изготавливаются с минимальными люфтами, конструкцию допустимо рассматривать в виде единой жесткой конструкции, т. е. жестко закреплённой балки в точке А . Тогда уравнения момента и силы реакции в точке А , а также уравнения моментов в шарнирах можно определить следующим образом:
M = — F^ • ~1 F, • 1 + 2 — F • 1 + 1 2 + “3" — P • X — P • x? — P • x3 ,
A 122123122112233
R A =— F i — F 2 — F 3 — P i — P 2 — P 3 , (4)
M 1 _ M A + R A. l i — f i •f 2 u P i ( l i — x i ) ,
M 2 = M A + r a • ( 1 1 + 1 2 ) — F i •! l 1 + 1 2 J— P 1 ( 1 2 — X i ) — F 2 •! l 2 j— P , ( 1 2 — x 2 ), (6)
где 1 i - длина i -й панели, i e [1;3]; F i - вес i -й панели; P i - сила обезвешивания i -го элемента системы обезвешивания.
Количество неизвестных переменных в (3)–(6) равно 6. Обозначим неизвестные переменные в виде вектора X = (xi,x2,x3,Pi,P2,P3). Поскольку в качестве основного условия обезвешивания выбрано условие минимизации моментов в шарнирах, а моменты могут быть как положительными, так и отрицательными, то в качестве функции минимизации выбрана сумма модулей моментов в шарнирах iim (Imai+Mii+M 21)^ 0.
Шаг 5. В качестве ограничений зададим расстояние между точками приложения сил обез-вешивания в сложенном состоянии. Данное расстояние должно составлять не менее 0,6 м. Кроме того, выбранная минимальная дистанция между точками должна быть соблюдена в процессе раскрытия.
Помимо этого, так как каждое устройство обезвешивания должно создавать силу, направленную противоположно весу обезвешиваемых элементов, то значения Pi будут отрицательными. Аналогично введем ограничение и на максимальное по модулю значение силы, обеспечиваемое элементом системы обезвешивания, например, 1 кН. Тогда ограничения вектора Х выглядит следующим образом:
^Х1 е[0;4],x2 e[4;8],x3 e[8;12], vP g[-1;0],P2 g[-1;0],P3 g[-1;0]v
I x 1 - ( x 2 - 4)| > 0,6,
* x - ( x 3 - 8)| > 0,6, J ( x 3 - 8) - ( x 2 - 4)| > 0,6.
Шаг 6. Перейдем непосредственно к определению оптимальных значений вектора. В качестве метода поиска минимального значения были выбраны генетические алгоритмы. Генетический алгоритм – метод оптимизации, основанный на принципе скрещивания биологических генов, позволяющий оптимизировать многопараметрические функционалы. Алгоритм работает следующим образом: для работы генетическому алгоритмы необходимо задать структуру особи, в качестве которой был выбран вектор X = ( x 1 , x 2, x 3, P 1 , P 2, P 3 ) . На первом этапе алгоритм создает 200 особей (заданное пользователем значение), данная величина называется размером популяции, со случайными значениями вектора Х . Используя (3)–(6) для каждой особи определяются моменты в точке А , шарнирах и значение функции минимизации. После все полученные особи ранжируются по значениям целевой функции и данная популяция становится родительской популяцией. После происходит создание новой популяции, причем 5 % новой популяции будут составлять лучшие особи родительской популяции без изменений, 80 % будут составлять особи, полученные в рамках скрещивания лучших особей родительской популяции, а оставшиеся 15 % будут получены в рамках мутации случайный особей родительской популяции. В результате формируется новая популяция в 200 особей, для которой так же будет выполнен необходимый расчет моментов и функции минимизации, а популяция станет родительской для новой выборки. Такие повторы происходят до тех пор, пока не сработает критерий остановки по количеству итераций (5000 итераций) или пока значение функции минимизации не будет значительно уменьшаться на протяжении 5 итераций подряд. Реализация работы генетического алгоритма проводилась в среде Matlab 2017 с использованием пакета Optimization Toolbox. Результат работы генетического алгоритма приведен в таблице, а процесс минимизации во времени на рис. 3.
Параметры системы обезвешивания, полученные с использованием генетических алгоритмов
|
X1 |
X2 |
X3 |
P1 |
P2 |
P3 |
|
1,075 |
6,064 |
10,741 |
–0,413 |
–0,597 |
–0,292 |
Шаг 7. Произведем проверку полученных результатов, для этого построим эпюры сил и моментов, действующих в системе при полученных параметрах системы обезвешивания (рис. 3).
По данным эпюрам видно, что моменты в шарнирах равны 0,4, 0,5 и 0,4 Нм, соответственно, кроме того, максимальный момент в точке панели равен 0,216 кНм, что не превышает заданный ранее предельно допустимый момент равный 0,24 кНм.
Поскольку проверка на расположение элементов системы обезвешивания в статическом положении была заложена в качестве ограничения, то проверка данного условия является избыточной. Соответственно, произведём проверку на отсутствие соударений элементов системы обезвешивания во время раскрытия. Для этого, как уже отмечалось ранее, расстояние между точками приложения силы не должно быть менее 0,6 м.
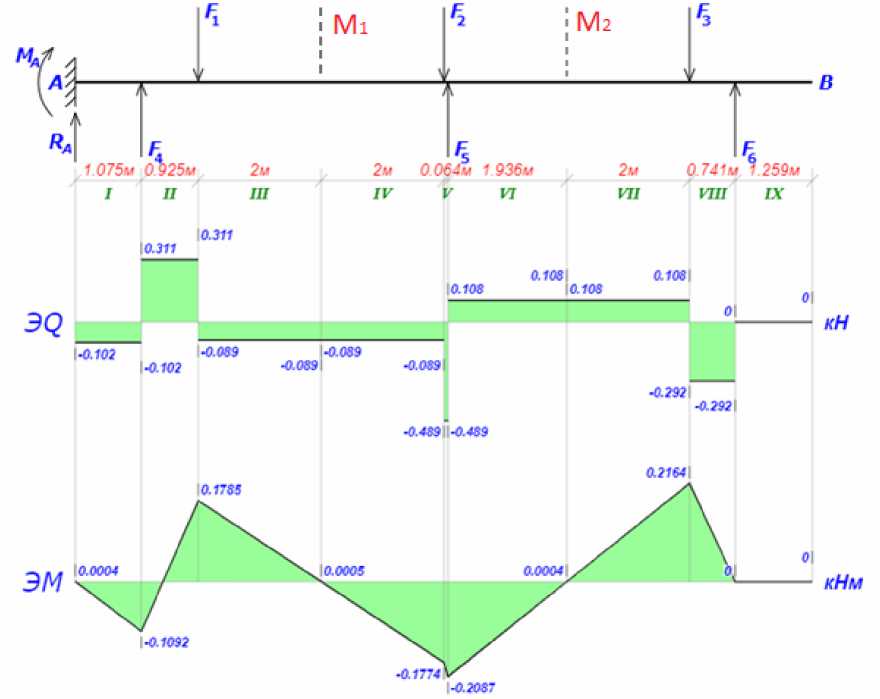
Рис. 3. Эпюры сил и напряжений с полученными параметрами системы обезвешивания
Fig. 3. Diagrams of forces and stresses with the obtained parameters of the weightlessness imitation system
Определим кинематику раскрытия солнечной панели. Для этого воспользуемся методом, предложенным в работах [15; 16]. Обозначим каждый элемент солнечной панели порядковым номером, слева направо, как это представлено на рис. 4. Поскольку каждый шарнир солнечной батареи позволяет осуществлять вращение только относительно вертикальной оси Z в глобальной системе координат, то каждый шарнир можно представить в виде поворотного звена, описываемого матрицей WR 3, а солнечные панели и балку, описываются матрицами WP 2, зависящими от длины этих звеньев [15; 16]:
|
cos ( a ) |
- sin ( a ) |
0 |
0 |
|
|
WR 3 ( a ) = |
sin ( a ) |
cos ( a ) |
0 |
0 |
|
0 |
0 |
1 |
0 |
|
|
. 0 |
0 |
0 |
1 |
WP 2 ( l ) =
|
1 |
0 |
0 |
0 |
|
0 |
1 |
0 |
l |
|
0 |
0 |
1 |
0 |
|
0 |
0 |
0 |
1 |
Каждый из углов поворота будем определять относительно предыдущей конструкции, т. е. угол q 1 – относительно наземной конструкции, q 2 – относительно солнечной панели 2, а угол q 3 – относительно панели 4.
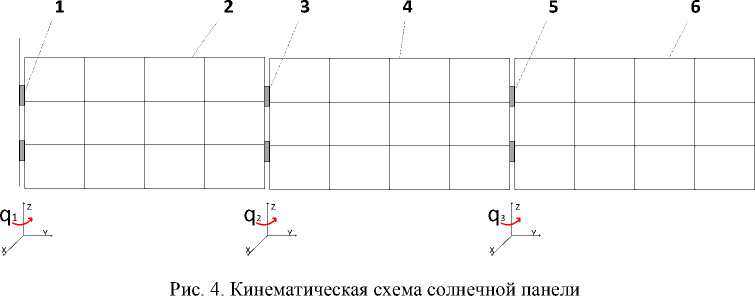
Fig. 4. Kinematic diagram of a solar panel
Используя методы, описанные в работах [15; 16], получим конечные матрицы каждой из опор, обозначенные как Ti , тогда:
T = WR 3( qi) • WP 2( Xi),(7)
T2 = WR 3( qi)) • WP 2( L) • WR 3( q 2) • WP 2( X 2),(8)
T3 = WR3(qi) • WP2(L) • WR3(q2) • WP2(L) • WR3(q3) • WP2(x3).(9)
Подставив в уравнения (7)–(9) матрицы поворота и переноса, получим следующие уравнения:
T 1
^ x ^ V y J
^ x i cos( q 1 ) v X i sm( q i )

^ L cos( q i) + x 2 cos( q i + q 2)
V L sin( q i ) + X 2 sin( q i + q 2 )
T 3

^ L cos( q i) + L cos( q i + q 2) + x 3 cos( q i + q 2 + q 3)
V L sin( q i) + L sin( q i + q 2) + X 3 sin( q i + q 2 + q 3)
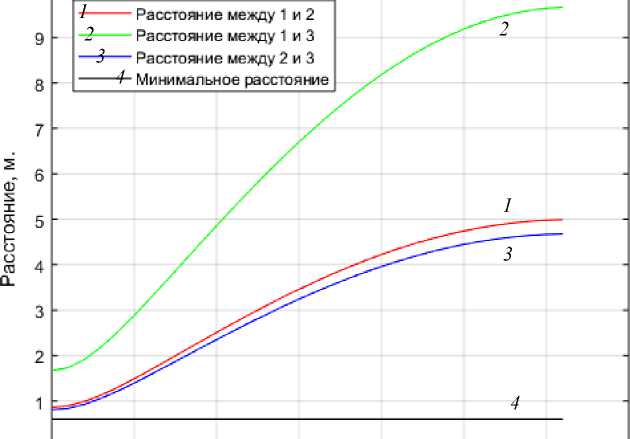
Уравнения (10)–(12) позволяют получить координаты каждой из точек приложения силы обезвешивания в процессе раскрытия. Чтобы определить расстояние от одной точки до другой в процессе раскрытия (рис. 5), рассчитаем квадратный корень от суммы квадратов разностей координат точек.
По графикам, представленным на рис. 5, видно, что расстояние между любыми двумя точками приложения обезвешивающих сил больше, чем необходимое, что говорит о том, что параметры системы обезвешивания выбраны верно. Последние два шага методики будут рассмотрены в дальнейших работах.
Заключение. В рамках данной работы предложена методика разработки системы обезвеши-вания крупногабаритных трансформируемых элементов космических аппаратов в наземных условиях. Данная методика состоит из десяти шагов, учитывает тип обезвешиваемого элемента, требования по обезвешиванию, а также тип системы обезвешивания, например, тросовые или опорные. Методика позволяет рассчитывать точки присоединения элементов системы обезве-шивания, в зависимости от типа обезвешиваемого элемента с учетом конструкторских ограничений. В работе рассмотрен пример на основе 3-секционной солнечной батареи без балки, для которой проведены 8 этапов из методики расчета и получены точки присоединения обезвеши-ваемых элементов с учетом ограничений по расстоянию в 0,6 м.
о
О 0.5 1 1.5 2 2.5 3 3.5
Время, с.
Рис. 5. Расстояние между точками приложения сил во время раскрытия
Fig. 5. The distance between the points of application of forces during deployment
Проведена проверка сил и моментов, действующих в системе в развернутом положении, по результатам которой была установлена допустимость рассчитанных характеристик системы обезвешивания. Кроме того, проведена проверка на выдерживание требуемого расстояния в процессе раскрытия солнечных панелей, которая также оказалось успешной.
Список литературы Методика расчета системы обезвешивания крупногабаритных трансформируемых элементов космических аппаратов при наземных испытаниях
- Пат. 2 468 969 РФ, МПК7 B 64 G 7/00. Испытательный стенд для раскрытия батареи солнечной / В. В. Билько (РФ), Н. А. Плетнёва (РФ), В. В. Плетенёв (РФ) и д.р. № 2 010 151 175 / 11; заявл. 13.12.2010; опубл. 10.12.2012. Бюл. № 34. 8 с.
- Пат. 2 483 991 РФ, МПК7 B 64 G 7/00, B 64 G 1/44. Стенд раскрытия панелей солнечной батареи / В. В. Билько, Н. А. Плетнева, В. И. Сороколетов, Ю. П. Шупляк. № 2 011 150 074 / 11. заявл. 08.12.2011; опубл. 10.06.2013, Бюл. № 16. 9 с.
- Пат. 5 110 194 США, МПК7 B 64 G 7/00, G 01 M 19/00. Controlled fiber-optic switch / E. A. Zurfluh. № EP89810584; заявл. 6.6.1990; опубл. 5.05.1992. 13 с.
- Зарницын А. Ю. Исследование динамических свойств вертикального канала активной си-локомпенсирующий системы / А. Ю. Зарницын, К. К. Звонцова, А. М. Малышенко, А. В. Воронин // Инженерия для освоения космоса : сб. науч. тр. IV Всеросс. молодежного форума с меж-дунар. участием (12-14 апреля 2016, г. Томск). Томск : Издательство ТПУ, 2016. С. 45-48.
- Пат. 5 379 657 США, МПК7 B 66 F 11/00, G 01 M 19/00. Microgravity suspension system for simulating a weightless environment / T. K. Hasselman. № US 07 / 902145; заявл. 22.6.1992; опубл. 10.01.1995. 18 с.
- Зарницын А. Ю. Исследование динамики следящих систем стенда с активной системой обезвешивания для испытаний раскрытия в земных условиях крыльев солнечных батарей / А. Ю. Зарницын, А. М. Малышенко // Молодежь и современные информационные технологии : сб. тр. XIV Междунар. науч.-практ. конф. студентов, аспирантов и молодых ученых : в 2 т. (7-11 ноября 2016, г. Томск). Томск : Издательство ТПУ, 2016. Т. 1. С. 268-269.
- Modeling of a Solar Arrays Deployment Process at Ground Tests of Mechanical Devices on Active Gravity Compensation Systems / I. Shpyakin, A. Voronin, A. Malyshenko and S. Majkov // 2018 3rd Russian-Pacific Conference on Computer Technology and Applications (RPC). Vladivostok, 2018. P.1-4.
- Automated weight compensation system for ground-based tryout of space vehicle solar panels / A. G. Verhoglyad, V. A. Kuklin, S. N. Makarov et al. // Сибирский журнал науки и технологий. 2017. Т. 18, № 3. С. 567-574.
- Vector Clinician's Guide. [Электронный ресурс]. URL: https://www.bionessvector. com/ documents/Vector%20Clinician's%20Guide%20Rev.%20K%20[efile] .pdf (дата обращения 4.06.2020).
- Design of RYSEN: an Intrinsically Safe and Low-Power 3D Overground Body Weight Support. IEEE Robotics and Automation Letters / M. Plooij, U. Keller, B. Sterke et al. // IEEE Robotics and Automation Letters. 2018. Vol. 3, No. 3. С. 2253-2260.
- Карманова А. В., Филипас А. А. Исследование модели трехточечного крана гибкой подвески // Актуальные проблемы инновационного развития ядерных технологий : материалы конф. в рамках науч. сессии НИЯУ МИФИ / науч. ред. М. Д. Носков. 2016. С. 68-68а.
- Разработка модели и системы управления мобильным роботов для обезвешивания солнечных панелей / А. С. Беляев, А. М. Малышенко, А. А. Филипас, О. Ю. Суменков // Известия Тульского гос. ун-та. Техн. науки. 2020. № 12. С. 3-12.
- Tsavnin A. V., Efimov S. V., Zamyatin S. V. External boundaries of pole localization region formulation for transfer function with interval-given parameters // Siberian Journal of Science and Technology. 2019. Vol. 20, No. 3. C. 327-332.
- Tsavnin A. V., Efimov S. V., Zamyatin S. V. Providing real closed-loop transfer functions poles for plant with interval-given parameters for overshoot elimination // 2019 11th International Congress on Ultra Modern Telecommunications and Control Systems and Workshops (ICUMT), Dublin, Ireland. 2019. C. 1-7.
- Малышенко А. М. Формализованный метод описания структур и параметров кинематических цепей манипуляторов // Известия Академии наук СССР. Машиноведение. 1989. № 4. C. 61-67.
- Малышенко А. М. Вывод уравнений кинематики для кривошипно-ползунного механизма на основе структурно-параметрического описания его кинематической цепи // Современные технологии, экономика и образование: сб. тр. Всеросс. науч.-метод. конф. (27-29 декабря 2019, г. Томск). Томск : Изд-во ТПУ, 2019. C. 57-60.
